Навигация
Итерационные методы с минимизацией невязки
11968
знаков
0
таблиц
4
изображения
2. Итерационные методы с минимизацией невязки
2.1 Ускорение сходимости итерационных методов
Точные методы получения решений, использующие рассмотренные эквивалентные преобразования полностью заполненной матрицы, требуют выполнения числа операций, пропорционального кубу размерности системы, и свободной памяти для хранения исходных и промежуточных значений – пропорциональной квадрату размера матрицы. Поэтому для сверх больших систем (число неизвестных больше нескольких сотен) ориентируются в основном на применение приближенных, итерационных методов.
Привлекательность тех или иных итерационных методов определяется скоростью сходимости итерационного процесса. Теоретически доказано, что итерационный процесс Гаусса-Зейделя сходится к решению при любом начальном значении искомого значения вектора решений, однако количество итерационных циклов может во много раз превышать число неизвестных (размерность матрицы). Это вызвало к жизни множество модификаций алгоритмов, обладающих большей скоростью сходимости.
Процедуры ускорения связаны с построением очередного вектора по одному или нескольким его значениям на предыдущих итерационных циклах. Фактически речь идет о построении на каждом шаге итераций интерполирующей функции с векторным аргументом, по которой вычисляют очередной вектор для подстановки. Для вычисления вектора ![]() на (k+1) – ом шаге итераций необходимо сначала получить величину
на (k+1) – ом шаге итераций необходимо сначала получить величину ![]() и единичный вектор направления
и единичный вектор направления ![]() и просуммировать предыдущий вектор
и просуммировать предыдущий вектор ![]() с добавочным вектором:
с добавочным вектором:
![]() .
.
Подстановка последнего в уравнение (![]() ) образует вектор
) образует вектор ![]() из покомпонентных невязок. Для задания структурной взаимосвязи каждой невязки с соответствующей компонентой вектора
из покомпонентных невязок. Для задания структурной взаимосвязи каждой невязки с соответствующей компонентой вектора ![]() и образования функционала (скалярной функции от вектора невязок) возмем скалярное произведение вектора невязки на вектор-строку
и образования функционала (скалярной функции от вектора невязок) возмем скалярное произведение вектора невязки на вектор-строку ![]() :
:
![]() .
.
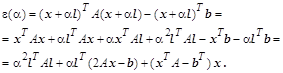
После подстановки очередного вектора функционал получит новое значение, которое будет зависеть от некоторого скаляра ![]() :
:
![]() .
.
Чтобы невязки на каждом шаге итераций становились меньше, желательно соответствующим образом выбирать ![]() . Найдем такое значение
. Найдем такое значение ![]() , при котором
, при котором ![]() . Для этого приравняем производную по
. Для этого приравняем производную по ![]() нулю. Индекс номера итерации пока опустим.
нулю. Индекс номера итерации пока опустим.

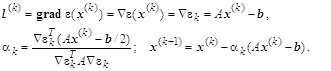
Из последнего равенства для (k+1) – й итерации величина шага ![]() в направлении вектора
в направлении вектора ![]() должна быть вычислена так:
должна быть вычислена так:
![]() .
.
Если единичные векторы направления последовательно выбирать равными координатным, т.е. ![]() , то будет реализован метод Гаусса-Зейделя (метод покоординатного спуска в задачах оптимизации).
, то будет реализован метод Гаусса-Зейделя (метод покоординатного спуска в задачах оптимизации).
Выбирая направление изменения очередного вектора в сторону локального убывания, т.е. в сторону, противоположную вектору градиента функционала, получается метод быстрого спуска. В этом случае
2.2 Метод сопряженных направлений
Среди методов, связанных с выбором направления существуют методы, в которых к векторам направлений предъявляются требования их взаимной сопряженности ![]() , т.е. матрица A преобразует вектор
, т.е. матрица A преобразует вектор ![]() в вектор, ортогональный вектору
в вектор, ортогональный вектору ![]() . Доказано, что выбор направлений из множества сопряженных позволяет при любом начальном
. Доказано, что выбор направлений из множества сопряженных позволяет при любом начальном ![]() свести задачу к точному решению не более, чем за n шагов, если матрица симметричная и положительно определенная (
свести задачу к точному решению не более, чем за n шагов, если матрица симметричная и положительно определенная (![]() ) размера
) размера ![]() .
.
Классическим набором сопряженных векторов являются собственные векторы матрицы (![]() ). Однако задача их определения сложнее решения заданной системы уравнений. Не менее сложна и задача построения произвольной системы ортогональных векторов.
). Однако задача их определения сложнее решения заданной системы уравнений. Не менее сложна и задача построения произвольной системы ортогональных векторов.
В то же время примером ортогональных направлений являются направления вектора градиента и нормали в заданной точке некоторой гиперповерхности. Такая поверхность выше была представлена функционалом в виде скалярного произведения вектора невязки и вектора x, которая и определяла направление спуска по направлению градиента. Если, используя такой же подход к вычислению ![]() , в выражении для последнего вектор невязок дополнительно модифицировать, как показано ниже, то рекуррентно вычисляемые очередные направления окажутся сопряженными:
, в выражении для последнего вектор невязок дополнительно модифицировать, как показано ниже, то рекуррентно вычисляемые очередные направления окажутся сопряженными:
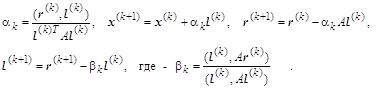
Выбрав в начале итераций ![]() и
и ![]() , после выполнения приведенных вычислений в (n-1) цикле будут получены векторы направлений, удовлетворяющие соотношениям
, после выполнения приведенных вычислений в (n-1) цикле будут получены векторы направлений, удовлетворяющие соотношениям
![]() ,
,
а векторы невязок будут ортогональными:
![]() .
.
Относительно метода сопряженных градиентов доказывается, что, если матрица (положительно определенная и симметричная) имеет только m (m<n) различных собственных значений, то итерационный процесс сходится не более, чем за m итераций. Однако в практической реализации скорость сходимости существенно зависит от величины меры обусловленности ![]() и в итерационном процессе может быть оценена согласно неравенству:
и в итерационном процессе может быть оценена согласно неравенству:
![]() ,
,
где ![]() – коэффициент, степень которого на каждом шаге итерационного процесса показывает во сколько раз уменьшилось расстояние до вектора точного решения x*.
– коэффициент, степень которого на каждом шаге итерационного процесса показывает во сколько раз уменьшилось расстояние до вектора точного решения x*.
Чем больше ![]() , тем ближе a к единице и, следовательно, степени a уменьшаются медленнее. В литературе описываются модифицированные методы сопряженных градиентов, которые тем или иным способом включают в итерационный процесс подобные (конгруэнтные – для комплексных матриц) преобразования, предварительно уменьшающие меру обусловленности.
, тем ближе a к единице и, следовательно, степени a уменьшаются медленнее. В литературе описываются модифицированные методы сопряженных градиентов, которые тем или иным способом включают в итерационный процесс подобные (конгруэнтные – для комплексных матриц) преобразования, предварительно уменьшающие меру обусловленности.
Литература
1. Бахвалов И.В. Численные методы. БИНОМ, 2008. – 636c.
2. Волков Е.А. Численные методы. Изд-во ЛАНЬ, 2004. – 256.
3. Демидович Б.П., ред., Марон И.А., Шувалова Э.З. Численные методы анализа. Издательство ЛАНЬ, 2008.
4. Пантелеев А.В., Киреев В.И., Пантелеев В.И., Киреев А.В. Численные методы в примерах и задачах. М: Высшая школа, 2004. – 480c.
5. Пирумов У.Г., Пирумов О.Г. Численные методы. Изд-во: ДРОФА, 2004. – 224c.
0 комментариев