Навигация
Прикладна теорія цифрових автоматів
10828
знаков
9
таблиц
6
изображений
ЗМІСТ
Введення
1. Вибір варіанта завдання
1.1. Граф-схема автомата Мура
1.2. Граф-схема автомата Мілі
2. Основна частина
2.1. Структурний синтез автомата Мура
2.1.1. Кодування станів
2.1.2. Функції збудження тригерів та вихідних сигналів
2.1.3. Переведеня у базис
2.2.Структурний синтез автомата Мілі
2.1.1. Кодування станів
2.1.2. Функції збудження тригерів та вихідних сигналів
2.1.3. Переведеня у базис
Висновок
Список використаної літератури
1.ВИБІР ВАРІАНТА ЗАВДАННЯ
1.1. Граф-схема алгоритму
Граф-схема складається з чотирьох блоків E, F, G, H і вершин “BEGIN” та “END”. Кожен з блоків має два входи (А, В) і два виходи (C, D). Я вибираю блоки E, F, G, H з п’яти блоків з номерами 0, 1, 2, 3, 4 (вони подаються в п.5 на рис.3-7 у методичних вказівках) на підставі чисел А, В, С, А+В+С (де А – число, В – місяць народження, С – номер студента в журналі), за такими правилами:
- блок “Е” має схему блока за номером А(MOD 5);
- блок “F” має схему блока за номером B(MOD 5);
- блок “G” має схему блока за номером C(MOD 5);
- блок “H” має схему блока за номером (А+B+C)(MOD 5).
В моєму варіанті:
А=30;
В=06;
С=22.
“Е”: А(MOD 5)=30(MOD 5)=0;
“F”: B(MOD 5)=06(MOD 5)=1;
“G”: C(MOD 5)=22(MOD 5)=2;
“H”: (А+B+C)(MOD 5)=(30+06+22)(MOD 5)=58(MOD 5)=3.
Блоки E, F, G, H з’єднуються між собою згідно зі структурною схемою графа, яка показана на рис. 10 у методичних вказівках.
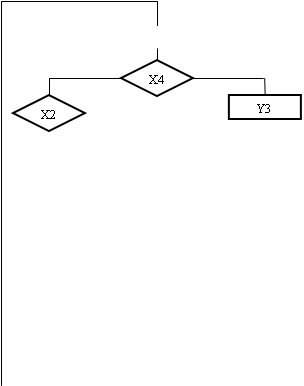
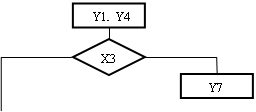
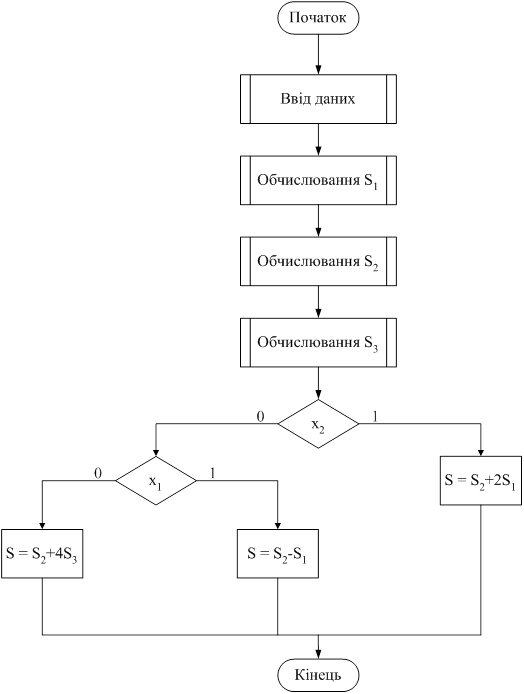
Згідно з моїм варіантом завдання, граф-схема автомата має такий вигляд:
BEGIN
 | |||
 | |||
![]()
![]()
![]()
![]()
![]()
END
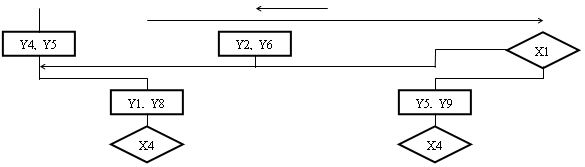
Рис.1.1. Граф-схема алгоритму автомата Мілі
| |||
BEGIN
 | |||
| |||
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
|
| |||||
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
END
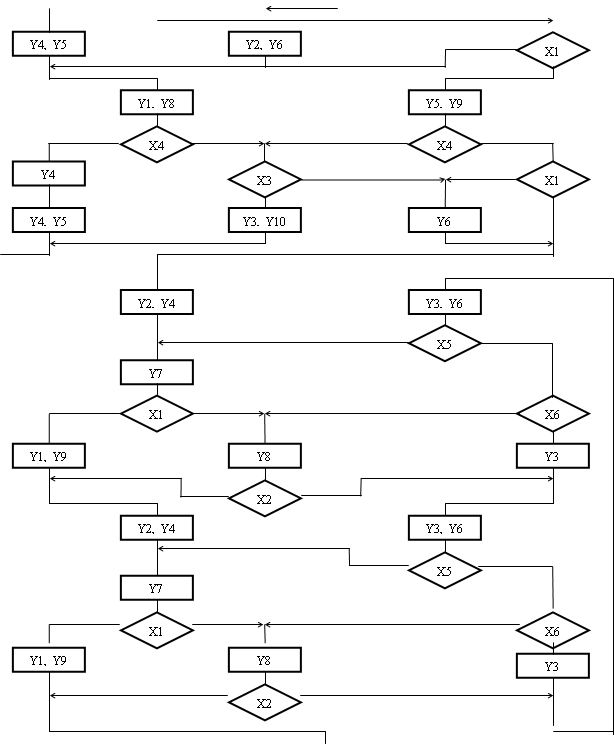
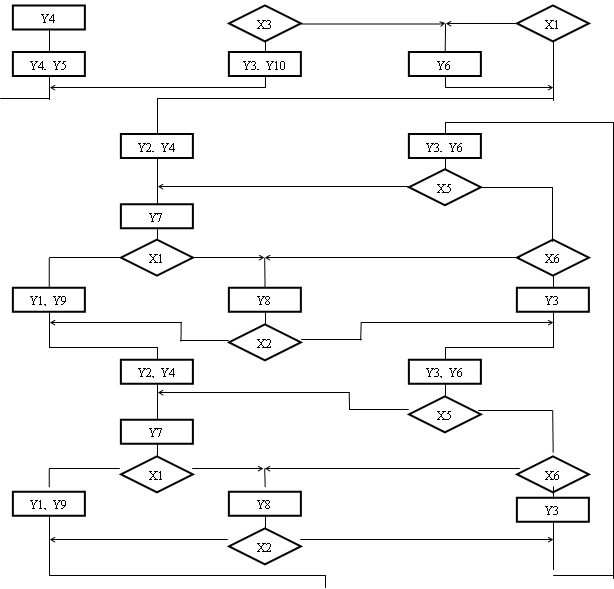
Рис.1.2. Граф-схема алгоритму автомата Мура
1.2. Тип тригера
Тип тригера вибирається за значенням числа A(MOD 3) на підставі табл.2 в методичних вказівках. Згідно з моїм варіантом завдання:
A(MOD 3)=30(MOD 3) =0.
Тому, згідно таблиці 2 у методичних вказівках, тип тригера в моєму завданні для синтезу автомата Мура – D, а для синтезу автомата Мілі – Т.
1.3. Серія інтегральних мікросхем
Серія інтегральних мікросхем для побудови принципових схем синтезованих автоматів для мого варіанта завдання – КР1533.
2. ОСНОВНА ЧАСТИНА
2.1. Структурний синтез автомата Мілі
2.1.1. Розмітка станів ГСА
На етапі одержання відміченої ГСА входи вершин, які слідують за операторними, відмічають символами a1, a2, ... за наступними правилами:
1) символом а1 відмічають вхід вершини, яка слідує за початковою, а також вхід кінцевої вершини;
2) входи усіх вершин , які слідують за операторними, повинні бути відмічені;
3) входи різних вершин, за винятком кінцевої, відмічаються різними символами;
4) якщо вхід вершини відмічається, то тільки одним символом.
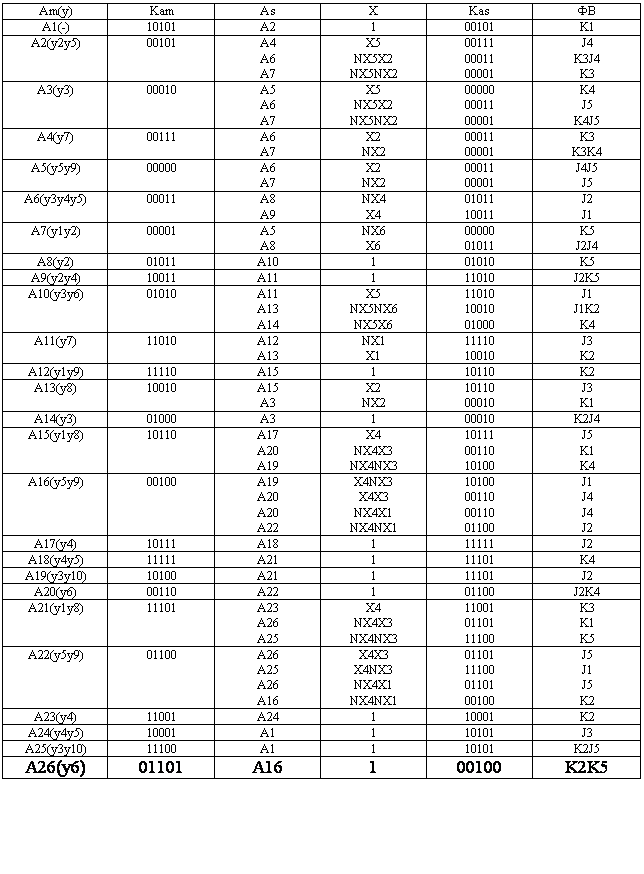
За ціми правилами в мене вийшло 22 стани (а22).
Похожие работы
... определенным называется абстрактный цифровой автомат, у которого функция переходов или функция выходов, или обе эти функции определены для всех пар переходов (xi,aj). Частичным называется абстрактный цифровой автомат, у которого функция переходов или функция выходов, или обе эти функции определены не для всех пар переходов (xi,aj). Абстрактный цифровой автомат называется инициальным, если на ...
... булевої алгебри. Аналітичний спосіб задання булевих функцій займає особливе місце в проектуванні цифрових машин. Фактично, всі перетворення над булевими ф-ціями, необхідні для побудови цифрових машин, ведуться на аналітичному рівні. Розглянемо області визначення булевоі ф-ції. Як уже відмічалось, між двійковими наборами і двійковими числами існує взаємнооднозначна відповідність. Отже, існує 2n рі ...
... y35 RS1:=Z1 y11 36 RS1 := RS2 + RS1 RS1 y26 RS2 y30 RS1+RS2 y40 RS1:=Z2 y10 Рис. 1.7 – Структурна граф-схема операційного автомата 2. СИНТЕЗ КЕРУЮЧИХ АВТОМАТІВ З ЖОРСТКОЮ ЛОГІКОЮ На практиці використовуються дві моделі МПА - автомат Милі й автомат Мура, розходження між якими полягає у функції ...
. 2002 Керівник: Ніколенко А.О. Прийняв до виконання: Ткаченко І.О. Зміст Завдання на розробку Зміст Синтез комбінаційної схеми Розрахування значень Мінімізація БФ Комбінаційна схема Проектування автоматів Вибір завдання Автомат Мура Автомат Мілі Заключення Перелік літератури 1 Синтез комбінаційної схеми 1.1 Визначення значень БФ Булева функція 5 змінних ...
0 комментариев