Навигация
Прикладна теорія цифрових автоматів
16075
знаков
3
таблицы
0
изображений
АНОТАЦІЯ
Курсове проектування є завершальним етапом вивчення студентами спеціальних дисциплін, передбачених робочим планом за фахом АМ.
Задачі курсового проектування - закріплення, систематизація, поглиблення і розвиток теоретичних і практичних знань, отриманих у процесі вивчення дисципліни, а також придбання ними практичних навичок самостійного рішення загальнотеоретичних, практичних і методичних питань проектування програмних продуктів.
Основна мета курсового проектування складається у вивченні й аналізі питань, зв'язаних зі спеціальними аспектами досліджуваних дисциплін, удосконалюванні загальнотеоретичної підготовки студентів, а також самостійному застосуванні отриманих знань.
Метою курсового проекту є проектування керуючих автоматів Милі і Мура, по заданій графі-схемі алгоритму, і побудова їхніх принципових схем на елементах заданої серії.
У курсовому проекті були реалізовані необхідні вимоги, і виконаний синтез керуючих автоматів на елементах серії КР1533.
RESUME
Course designing is the closing stage of studying by students of the special disciplines stipulated by the working plan on a speciality american.
Problems of course designing - fastening, ordering, a deepening and development of the theoretical and practical knowledge received during studying of discipline, and also purchase of practical habits of the independent decision of general-theoretical, practical and methodical questions of designing of software by them.
The basic purpose of course designing develops in studying and the analysis of the questions connected to special aspects of researched disciplines, perfection of general-theoretical preparation of students, and also independent application of the received knowledge.
The purpose of the course project is designing managing automatic devices of Mile and Mess, under the given column - circuit of algorithm, and construction of their basic circuits on elements of the given series.
In the course project there were realized necessary requirements, and the executed synthesis of managing automatic devices of elements of series KR1533.
ЗМІСТ
Введення
1. Вибір варіанта завдання
1.1. Граф-схема алгоритму
1.2. Тип тригера
1.3. Серія інтегральних мікросхем
2. Основна частина
2.1.Структурний синтез автомата Мура
2.1.1. Розмітка станів ГСА
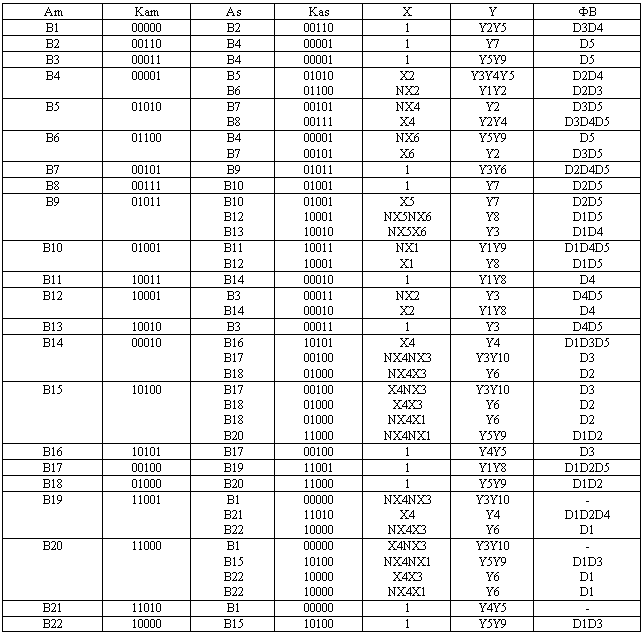
2.1.2. Таблиця переходів автомата
2.1.3. Кодування станів
2.1.4. Функції збудження тригерів та вихідних сигналів
2.2. Структурний синтез автомата Мілі
2.2.1. Розмітка станів ГСА
2.2.2. Таблиця переходів автомата
2.2.3. Кодування станів
2.2.5. Функції збудження тригерів та вихідних сигналів
Закінчення
Список використаної літератури
1 Введення
Метою курсового проекту по дисципліні "Прикладна теорія цифрових автоматів" є закріплення основних теоретичних знань і практичних навичок у ході самостійної роботи. У ході роботи необхідно :1. спроектувати керуючий автомат Милі по заданої граф - схемі алгоритму. Побудувати принципову схему автомата з використанням елементів серії КР1533.2. спроектувати керуючий автомат Мура по заданої граф - схемі алгоритму. Побудувати принципову схему автомата з використанням елементів серії КР1533. Керуючий автомат генерує послідовність керуючих сигналів, запропоновану мікропрограмою, і відповідну значенням логічних елементів, тобто задає порядок виконання дій в операційному автоматі, що випливають з алгоритму виконання операцій. Кінцевий автомат, що інтерпретує мікропрограму роботи операційного пристрою, називається мікропрограмним автоматом. На практиці найбільше поширення одержали два класи автоматів - автомати Милі і Мура. Основна відмінність автомата Мура від автомата Милі полягає в тім, що вихідний сигнал в автоматі Мура залежить тільки від поточного стану автомата й у явному виді не залежить від вхідного сигналу.
1.1 Вибір завдання.
1.1 Вибір граф-схеми алгоритму
Граф-схеми алгоритмів обираються кожним студентом в індивідуальному порядку. Вона складається з чотирьох блоків: E, F, G, H. Студенти обирають граф-схему із п’яти блоків з номерами 0...4 на підставі чисел А, В, С та (А+В+С) за наступними правилами:
- блок "Е" – схема під номером (А) mod 5 = 16 mod 5 = 1;
- блок "F" – схема під номером (В) mod 5 = 01 mod 5 = 1;
- блок "G" – схема під номером (С) mod 5 = 26 mod 5 = 1;
- блок "H" – схема під номером (А+В+С) mod 5 = 43 mod 5 = 3.
Розташування обирається з використанням номера групи.
1.2 Вибір типа тригера
Тип тригера знаходимо по таблиці 1 на підставі числа (А) mod 3 = 27 mod 3 = 0.
Таблиця 1 Для вибору варіанта тргера
| (A) mod 3 | ТИП ТРИГЕРА | |
| 0 | Т | D |
| 1 | D | JK |
| 2 | JK | T |
| автомат | Мілі | Мура |
Отримуємо D-тригер для автомата Мілі та JK-тригер для Мура.
1.3. Вибір ссерії інтегральних мікросхем
Для парних номерів за списком (26) - серія КР1533.
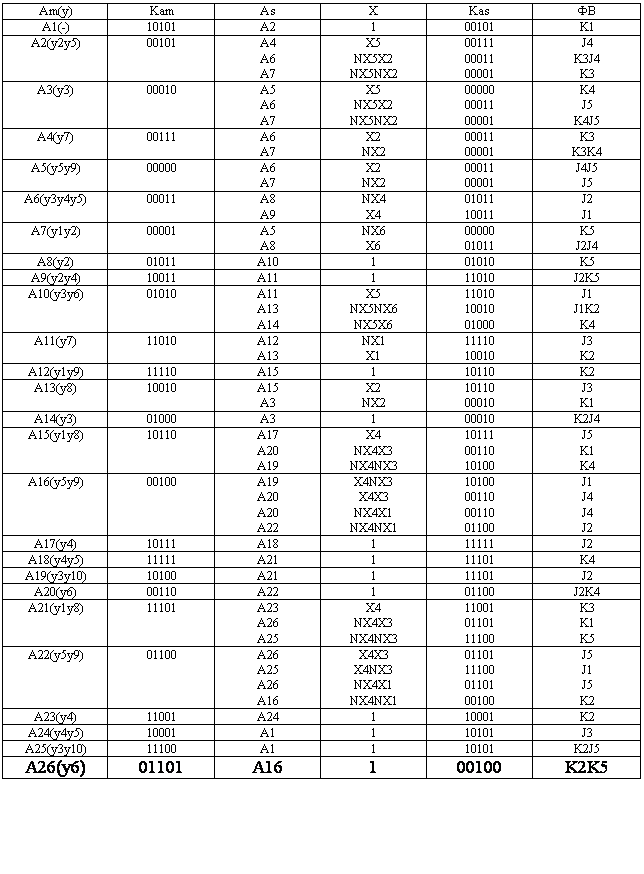
Після відповідної розмітки будуємо таблиці переходів для обох автоматів.
2 ОСНОВНА ЧАСТИНА
2.1.Структурний синтез автомата Мура
2.11. Розмітка станів ГСА
Для автомата Мура на етапі одержання відміченої ГСА розмітка провадиться відповідно до наступних правил:
1) символом а1 відмічаються початкова і кінцева вершини;
2) різні операторні вершини відмічаються різними символами;
3) всі операторні вершини повинні бути відмічені.
Відповідно до цих правил я відмітив 25 станів.
Похожие работы
... определенным называется абстрактный цифровой автомат, у которого функция переходов или функция выходов, или обе эти функции определены для всех пар переходов (xi,aj). Частичным называется абстрактный цифровой автомат, у которого функция переходов или функция выходов, или обе эти функции определены не для всех пар переходов (xi,aj). Абстрактный цифровой автомат называется инициальным, если на ...
... булевої алгебри. Аналітичний спосіб задання булевих функцій займає особливе місце в проектуванні цифрових машин. Фактично, всі перетворення над булевими ф-ціями, необхідні для побудови цифрових машин, ведуться на аналітичному рівні. Розглянемо області визначення булевоі ф-ції. Як уже відмічалось, між двійковими наборами і двійковими числами існує взаємнооднозначна відповідність. Отже, існує 2n рі ...
... y35 RS1:=Z1 y11 36 RS1 := RS2 + RS1 RS1 y26 RS2 y30 RS1+RS2 y40 RS1:=Z2 y10 Рис. 1.7 – Структурна граф-схема операційного автомата 2. СИНТЕЗ КЕРУЮЧИХ АВТОМАТІВ З ЖОРСТКОЮ ЛОГІКОЮ На практиці використовуються дві моделі МПА - автомат Милі й автомат Мура, розходження між якими полягає у функції ...
. 2002 Керівник: Ніколенко А.О. Прийняв до виконання: Ткаченко І.О. Зміст Завдання на розробку Зміст Синтез комбінаційної схеми Розрахування значень Мінімізація БФ Комбінаційна схема Проектування автоматів Вибір завдання Автомат Мура Автомат Мілі Заключення Перелік літератури 1 Синтез комбінаційної схеми 1.1 Визначення значень БФ Булева функція 5 змінних ...
0 комментариев