Навигация
Функції збудження тригерів та вихідних сигналів
15002
знака
4
таблицы
0
изображений
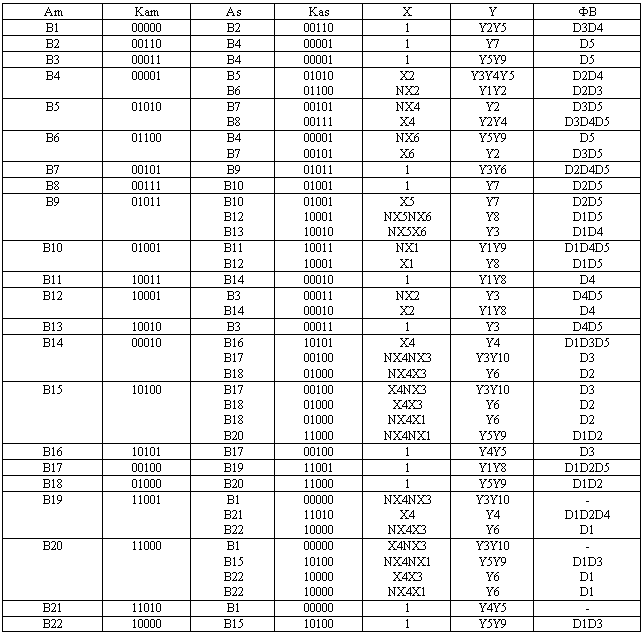
2.2.2. Функції збудження тригерів та вихідних сигналів
Введемо слідуючі позначення:
A=b3NX1 П=b21Х4NX3
Б=b5X4 Р= b5NX4Х3
H=b9X1 С=В15Х5
Г=b11X4 Т= b17Х4NX3
Д=b13X2 У= b19NX5X6
Е=b13NX2 Ф= b21NX4NX1
Ж=b14X2 Х= b3Х1
З=b14NX2 Ц= b5NX4NX3
И=b15NX5NX6 Ч= b11NX4NX3
К=b17NX4NX1 Ш= b15NX5X6
Л=b9NX1 Щ= b17X4X3
М=b11NX4X3 Э= b17NX4X1
O= b19NX5NX6 Ю= b21X4X3
Я= b21NX4X1 В=В19Х5
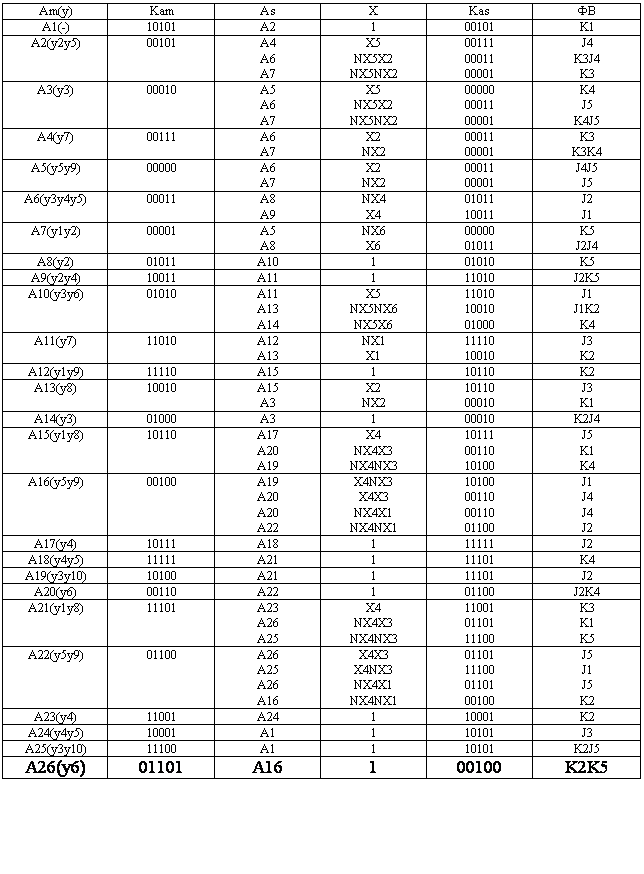
Виписуємо з таблиці вирази для тригерів:
T1=b7+Г+Ч+П
Т2=b2+А+b4+Б+b6+Л+Н+М+З+О+П
Т3=b1+Р+b8+Е+С+И+Т+У+b20
Т4 =А+b10+Д+Е+Ж+З+b16+К+b18+b20+Ф+b22
Т5=Х+Б+Ц+H+Ч+b12+Д+Ж+И+Ш+Щ+Э+K+Ю+Я+b22
Формуємо функції виходів автомата:
Y1=А+b4+Л+b10+Д
Y2=b1+b7
Y3=Ц+Ч+Ж+Ш+Т+К+b18+У+П+Ф+b22
Y4=b1+Б+b6+b7+Г+b12
Y5=b6+b12+Е+b16+b20
Y6=М+З+Щ+Э+К+b18+Ю+Я+Ф+b22
Y7=b2+b8+С+В
Y8=Х+b4+Н+b10+Д+И+О
Y9=А+Л+Е+b16+b20
Y10=Ц+Ч+Ж+Т+П
![]()
![]()
![]() 2.2.3. Переведеня у базис:
2.2.3. Переведеня у базис:
![]()
![]()
![]() T1=b7+Г+Ч+П= Nb7∙NГ∙NЧ∙NП
T1=b7+Г+Ч+П= Nb7∙NГ∙NЧ∙NП
![]()
![]()
![]() Т2=b2+А+b4+Б+b6+Л+Н+М+З+О+П=
Т2=b2+А+b4+Б+b6+Л+Н+М+З+О+П=
![]()
![]() =Nb2∙NА∙Nb4∙NБ∙Nb6∙NЛ∙NН∙NМ+NЗ∙NО∙NП
=Nb2∙NА∙Nb4∙NБ∙Nb6∙NЛ∙NН∙NМ+NЗ∙NО∙NП
![]() Т3=b1+Р+b8+Е+С+И+Т+У+b20=
Т3=b1+Р+b8+Е+С+И+Т+У+b20=
![]() =Nb1∙NР∙Nb8∙NЕ∙NС∙NИ∙NТ∙NУ+b20
=Nb1∙NР∙Nb8∙NЕ∙NС∙NИ∙NТ∙NУ+b20
![]()
![]()
![]()
![]()
![]() Т4 =А+b10+Д+Е+Ж+З+b16+К+b18+b20+Ф+b22=
Т4 =А+b10+Д+Е+Ж+З+b16+К+b18+b20+Ф+b22=
![]()
![]()
![]()
![]() =NА∙Nb10∙NД∙NЕ∙NЖ∙NЗ∙Nb16∙NК+Nb18∙Nb20∙NФ∙Nb22
=NА∙Nb10∙NД∙NЕ∙NЖ∙NЗ∙Nb16∙NК+Nb18∙Nb20∙NФ∙Nb22
![]()
![]() Т5=Х+Б+Ц+H+Ч+b12+Д+Ж+И+Ш+Щ+Э+K+Ю+Я+b22=
Т5=Х+Б+Ц+H+Ч+b12+Д+Ж+И+Ш+Щ+Э+K+Ю+Я+b22=
=NХ∙NБ∙NЦ∙NH∙NЧ∙Nb12∙NД∙NЖ+NИ∙NШ∙NЩ∙NЭ∙NK∙NЮ∙NЯ∙Nb22
![]()
![]()
![]() Y1=А+b4+Л+b10+Д= NА∙Nb4∙NЛ∙Nb10∙NД
Y1=А+b4+Л+b10+Д= NА∙Nb4∙NЛ∙Nb10∙NД
![]()
![]()
![]()
![]() Y2=b1+b7= Nb1∙Nb7
Y2=b1+b7= Nb1∙Nb7
![]()
![]() Y3=Ц+Ч+Ж+Ш+Т+К+b18+У+П+Ф+b22=NЦ∙NЧ∙NЖ∙NШ∙NТ∙NК∙Nb18∙NУ+
Y3=Ц+Ч+Ж+Ш+Т+К+b18+У+П+Ф+b22=NЦ∙NЧ∙NЖ∙NШ∙NТ∙NК∙Nb18∙NУ+
![]()
![]()
![]() +NП∙NФ∙Nb22
+NП∙NФ∙Nb22
![]()
![]() Y4=b1+Б+b6+b7+Г+b12=Nb1∙NБ∙Nb6∙Nb7∙NГ∙Nb12
Y4=b1+Б+b6+b7+Г+b12=Nb1∙NБ∙Nb6∙Nb7∙NГ∙Nb12
![]()
![]()
![]() Y5=b6+b12+Е+b16+b20= Nb6∙Nb12∙NЕ∙Nb16∙Nb20
Y5=b6+b12+Е+b16+b20= Nb6∙Nb12∙NЕ∙Nb16∙Nb20
![]()
![]()
![]()
![]() Y6=М+З+Щ+Э+К+b18+Ю+Я+Ф+b22= NМ∙NЗ∙NЩ∙NЭ∙NК∙Nb18∙NЮ∙NЯ+
Y6=М+З+Щ+Э+К+b18+Ю+Я+Ф+b22= NМ∙NЗ∙NЩ∙NЭ∙NК∙Nb18∙NЮ∙NЯ+
![]() +NФ∙Nb22
+NФ∙Nb22
![]()
![]()
![]() Y7=b2+b8+С+В= Nb2∙Nb8∙NС∙NВ
Y7=b2+b8+С+В= Nb2∙Nb8∙NС∙NВ
![]()
![]()
![]()
![]() Y8=Х+b4+Н+b10+Д+И+О= NХ∙Nb4∙NН∙Nb10∙NД∙NИ∙NО
Y8=Х+b4+Н+b10+Д+И+О= NХ∙Nb4∙NН∙Nb10∙NД∙NИ∙NО
![]()
![]() Y9=А+Л+Е+b16+b20= NА∙NЛ∙NЕ∙Nb16∙Nb20
Y9=А+Л+Е+b16+b20= NА∙NЛ∙NЕ∙Nb16∙Nb20
![]() Y10=Ц+Ч+Ж+Т+П= NЦ∙NЧ∙NЖ∙NТ∙NП
Y10=Ц+Ч+Ж+Т+П= NЦ∙NЧ∙NЖ∙NТ∙NП
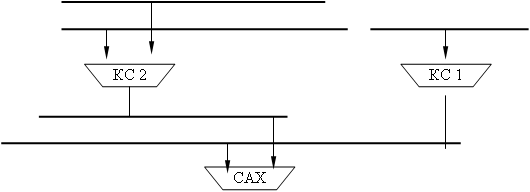
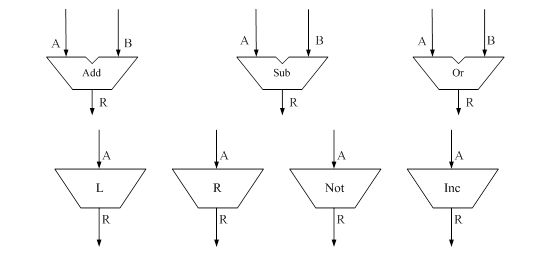
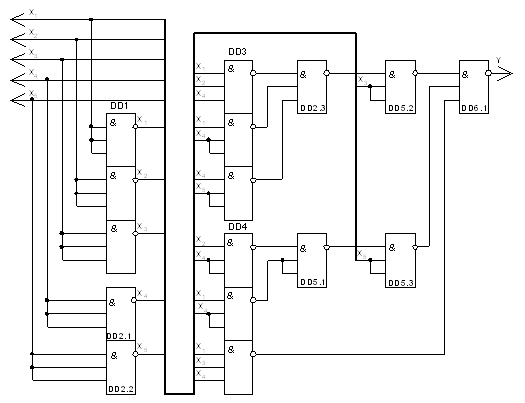
Ми отримали усі необхідні вирази для принципової схеми. Будуємо її, користуючись формулами для тригерів та вихідними станами.
Висновок
В ході проекту ми отримали комбінаційну схему булевої функції в заданому базисі та побудували принципову схему керуючого автомата Мура.
Синтез автомата був виконаний з урахуванням серії КР 555, тому може бути зроблений та опробований в реальному житті. В цілому курсова робота довела свою важливість у закріпленні отриманих знань та набутті низки звичок щодо проектування цифрових автоматів.
Перелік використаної літератури
1. Методичні вказівки до курсової роботи по дисципліні “Прикладна теорія ци фрових автоматів”. Одеса. ОГПУ. 1998р.
2. Мікросхеми серії 1533(555). Стислі теоретичні дані. Одеса. Центр НТТМ ОГПУ. 1975г.
3. ГОСТ 2.708-81 ЄСКД. Правила виконання електричних схем цифрової обчи слювальної техніки.
4. ГОСТ 2.743-82. ЄСКД. Умовні графічні позначення в схемах. Елементи цифрової техніки.
Похожие работы
... определенным называется абстрактный цифровой автомат, у которого функция переходов или функция выходов, или обе эти функции определены для всех пар переходов (xi,aj). Частичным называется абстрактный цифровой автомат, у которого функция переходов или функция выходов, или обе эти функции определены не для всех пар переходов (xi,aj). Абстрактный цифровой автомат называется инициальным, если на ...
... булевої алгебри. Аналітичний спосіб задання булевих функцій займає особливе місце в проектуванні цифрових машин. Фактично, всі перетворення над булевими ф-ціями, необхідні для побудови цифрових машин, ведуться на аналітичному рівні. Розглянемо області визначення булевоі ф-ції. Як уже відмічалось, між двійковими наборами і двійковими числами існує взаємнооднозначна відповідність. Отже, існує 2n рі ...
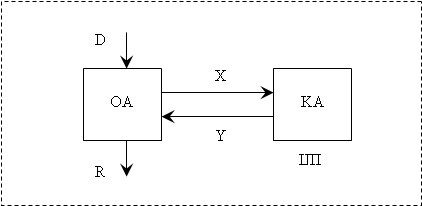
... y35 RS1:=Z1 y11 36 RS1 := RS2 + RS1 RS1 y26 RS2 y30 RS1+RS2 y40 RS1:=Z2 y10 Рис. 1.7 – Структурна граф-схема операційного автомата 2. СИНТЕЗ КЕРУЮЧИХ АВТОМАТІВ З ЖОРСТКОЮ ЛОГІКОЮ На практиці використовуються дві моделі МПА - автомат Милі й автомат Мура, розходження між якими полягає у функції ...
. 2002 Керівник: Ніколенко А.О. Прийняв до виконання: Ткаченко І.О. Зміст Завдання на розробку Зміст Синтез комбінаційної схеми Розрахування значень Мінімізація БФ Комбінаційна схема Проектування автоматів Вибір завдання Автомат Мура Автомат Мілі Заключення Перелік літератури 1 Синтез комбінаційної схеми 1.1 Визначення значень БФ Булева функція 5 змінних ...
0 комментариев