Навигация
Синтез автомата Мілі на JK-тригерах
10503
знака
10
таблиц
1
изображение
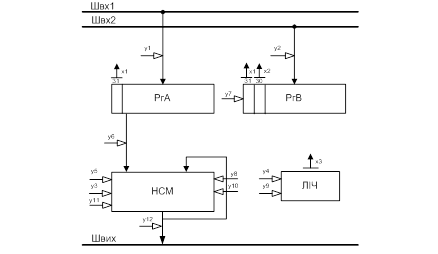
4. Синтез автомата Мілі на JK-тригерах
Наш автомат має 15 станів, значить, для його побудови нам необхідно 4 JK-тригерa.
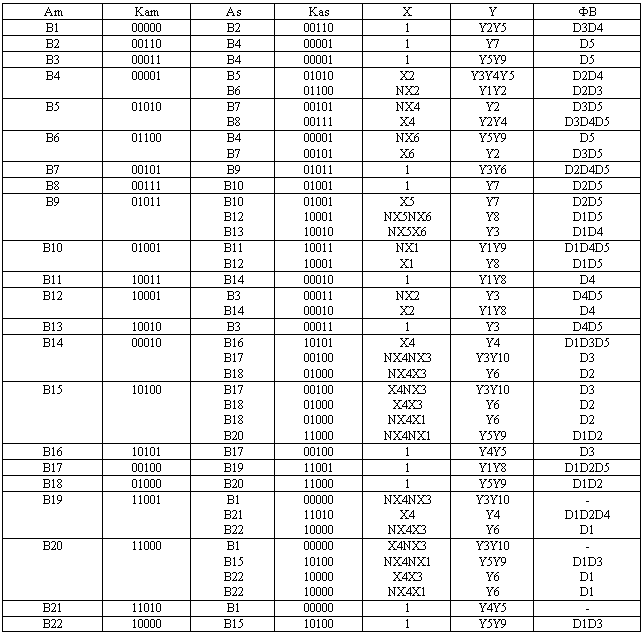
Будуємо таблицю переходів автомата Мілі на базі JK-тригера. Виконаємо кодування станів керуючого автомата (УА) з використанням відповідного алгоритму кодування для JK-триггера. Функцію порушення вихідних сигналів визначимо в залежності від поточного стану та вхідних сигналів згідно з таблицею:
Таблиця
| Qt | Qt+1 | J | K |
| 0 | 0 | 0 | X |
| 0 | 1 | 1 | X |
| 1 | 0 | X | 1 |
| 1 | 1 | X | 0 |
| a1 | 1110 |
| a2 | 0110 |
| a3 | 0111 |
| a4 | 0100 |
| a5 | 0000 |
| a6 | 1001 |
| a7 | 1000 |
| a8 | 1100 |
| a9 | 1111 |
| a10 | 1011 |
| a11 | 1101 |
| a12 | 0011 |
| a13 | 0010 |
| a14 | 0101 |
| a15 | 0001 |
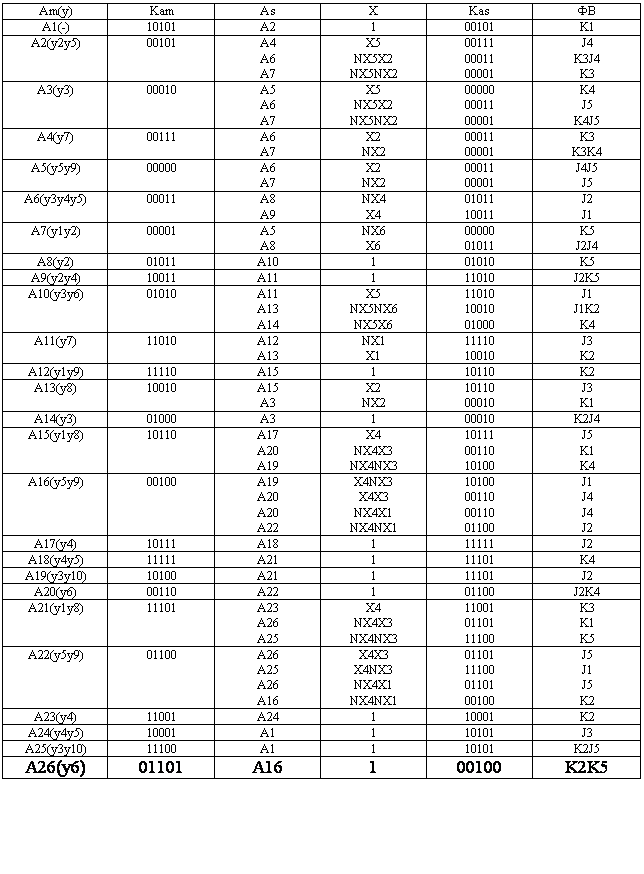
Таблиця для входів та виходів атомата Мілі
| am | Kam | AS | KaS | X | Y | Функція збудження |
| a1 | 1110 | a2 | 0110 | 1 | y1, y4 | J4 |
| a2 | 0110 | a3 a4 | 0111 0100 | x3 x3 | y7 y2, y6 | J3K4 J3 |
| a3 | 0111 | a12 a5 | 0011 0000 | x1 x1 | y5, y9 y1, y8 | J1J4 J2K3 |
| a4 | 0100 | a5 | 0000 | 1 | y1, y8 | J2K3K4 |
| a5 | 0000 | a6 a7 a13 | 1001 1000 0010 | x4 x4x3 x4x3 | y4 y3, y10 y6 | J4 J3 J1 |
| a6 | 1001 | a7 | 1000 | 1 | y5, y4 | J3K4 |
| a7 | 1000 | a8 | 1100 | 1 | y2 | J4 |
| a8 | 1100 | a9 a11 | 1111 1101 | x5 x5 | y7, y10 y6 | J1K2K3K4 J1K2K4 |
| a9 | 1111 | a1 a10 | 1110 1011 | x4 x4 | y2 y1, y3 | K1 J4 |
| a10 | 1011 | a11 a10 | 1101 1011 | x2 x2 | y6 y1, y3 | J3K4 – |
| a11 | 1101 | a9 | 1111 | 1 | y7, y10 | K3 |
| a12 | 0011 | a15 a7 a13 a13 | 0001 1100 0010 0010 | x4x1 x4x3 x4x1 x4x3 | y1, y2 y3, y10 y6 y6 | J2K4 K1J2K4 J2K3K4 J2K3K4 |
| a13 | 0010 | a15 | 0001 | 1 | y1, y2 | J3 |
| a14 | 0101 | a4 | 0100 | 1 | y2, y6 | K1K2J3 |
| a15 | 0001 | a14 a4 a12 a5 | 0101 0100 0011 0000 | x4 x4x2 x4x2x1 x4x2x1 | y3 y4, y5 y5, y9 y1, y8 | K2J4 K1K2J4 K2J4 K1K3 |
Для отримання вихідних сигналів:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Виписуємо функцію збудження:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Записуємо вихідні сигнали та функцію збудження у такому виразі:



![]()
![]()

![]()
![]()
![]()
![]()
![]()

![]()
![]()
![]()
![]()


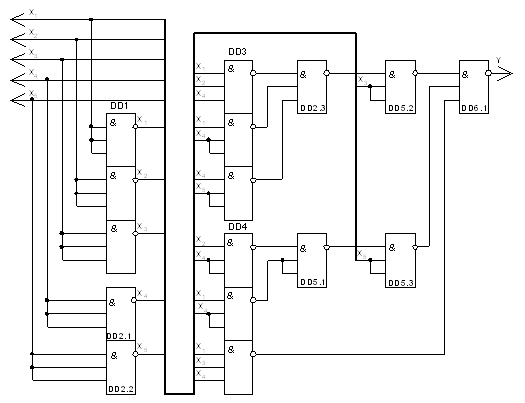
Побудова принципової схеми автомата на основі програмованих логічних матриць ПЛМ
Враховуючи отримані вирази для вихідних сигналів і функцій порушення, які підходять для побудови схеми на основі ПЛМ, наведемо таблицю з’єднань для ПЛМ, побудуємо принципову схему синтезованого автомата. При побудові принципової схеми автомата Мілі необхідно використати елементи більш високого ступеня інтеграції.
Висновки
В ході виконання даного курсового проекту був проведений аналіз основних розділів та закріплення теоретичних положень дисципліни комп`ютерна схемотехніка з метою закріплення лекційного та практичного матеріалу; також були одержані практичні навички в проектуванні принципових схем цифрових пристроїв обчислювальної техніки. У курсовій роботі були виявлені основні навички вирішення задач синтезу комбінаційної схеми та побудови функціональної схеми в заданому базисі за результатами синтезу. Також було проведене проектування керуючих автоматів Мура та Мілі за заданою граф-схемою алгоритму, а також побудування принципової схеми автоматів: для Мура – на елементах малого ступеня інтеграції заданої серії, а для Мілі – автомата на основі програмованих логічних матриць (ПЛМ). Знання, одержані під час виконання цієї роботи, використовуються для аналізу та синтезу різноманітних цифрових пристроїв обчислювальної техніки та автоматики.
Похожие работы
... льш прості операції які називаються мікроопераціями тобто кожна операція – це визначена послідовність мікрооперацій. Існують два основні типи керуючих автоматів 1. Керуючий автомат з жорсткою чи схемною логікою. Для кожної операції будується набір комбінаційних схем які в потрібних тактах збуджують відповідні керуючі сигнали. Іншими словами ...
. 2002 Керівник: Ніколенко А.О. Прийняв до виконання: Ткаченко І.О. Зміст Завдання на розробку Зміст Синтез комбінаційної схеми Розрахування значень Мінімізація БФ Комбінаційна схема Проектування автоматів Вибір завдання Автомат Мура Автомат Мілі Заключення Перелік літератури 1 Синтез комбінаційної схеми 1.1 Визначення значень БФ Булева функція 5 змінних ...
... Таблиця переходів автомата 2.2.3. Кодування станів 2.2.5. Функції збудження тригерів та вихідних сигналів Закінчення Список використаної літератури 1 Введення Метою курсового проекту по дисципліні "Прикладна теорія цифрових автоматів" є закріплення основних теоретичних знань і практичних навичок у ході самостійної роботи. У ході роботи необхідно :1. спроектувати керуючий автомат Милі по ...
... в одному розряді перетворюється в 1, а в другому розряді 1 в 0). 2.4 Управляючий автомат(Каган стр.241 - 243) Будь-який цифровий пристрій складається з двох частин – операційного та управляючого блоків. Операційний блок характеризується сукупністю визначених в ньому мікрооперацій, кожна з яких являє собою деякий виконуваний в даному операційному блоці елементарний акт передачі або перетворення і ...
0 комментариев