Навигация
Розробка управляючого і операційног вузлів ЕОМ
50010
знаков
6
таблиц
0
изображений
1. Завдання.
Розробити управляючий і операційний вузли ЕОМ з наступними параметрами:
1. Система числення:
1.2 десяткова
2. Спосіб представлення інформації:
2.1 з фіксованою комою
3. Загальна кількість розрядів:
3.2 24
4. Набір операцій:
основна:
4.2 ділення
додаткова:
4.7 логічне множення
5. Основний тип використовуваних логічних елементів:
5.4 КМОН
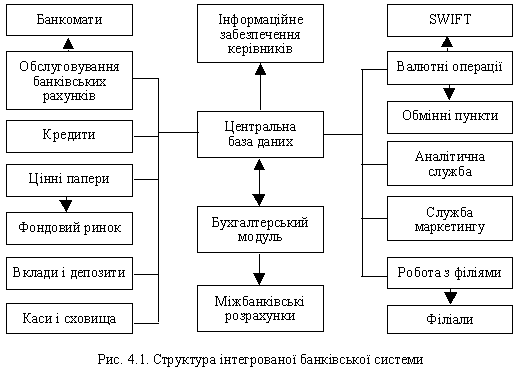
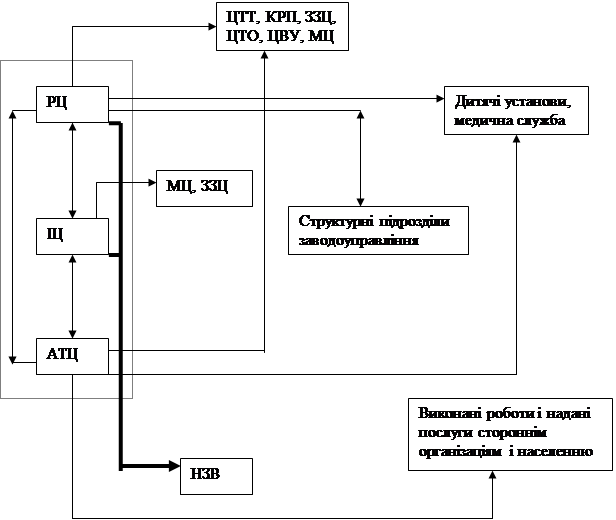
6. Загальна функціональна схема проектованого пристрою подана на рис. 1.
Вхідні дані, n розрядів
СОП
m
Результати обчислень
УА
ОА
СПО
z
СС
x
Операційний автомат
Управляючий автомат
СЗО
ОР
рис. № 1
| СОП – сигнал операції |
2. Огляд і аналіз літературних джерел
2.1
Поняття про
комбінаційну
схему і
цифровий
автомат.
(Каган ст.
62-65)
Пристрій, який перетворює дискретну інформацію, в загальному випадку має n входів для вхідних сигналів і k виходів, з яких знімаються вихідні сигнали.
Кожний з вхідних сигналів являє собою деякий символ (букву) вхідного алфавіту. В свою чергу, вихідні сигнали являють собою символи (букви) вихідного алфавіту. В якості букв цих алфавітів звичайно використовуються двійкові і, рідше, десяткові цифри.
Перетворення інформації в ЕОМ виконується електронними пристроями (логічними схемами) двох класів: комбінаційними схемами і цифровими автоматами.
В комбінаційних схемах (КС) сукупність вихідних сигналів (вихідне слово Y) в дискретний момент часу ti однозначно визначається вхідними сигналами (вхідним словом X), які поступили на входи в той самий дискретний момент часу.
Закон функціонування КС визначений, якщо є задана відповідність між словами її вхідного і вихідного алфавітів, наприклад, в вигляді таблиці.
Другий, більш складний клас перетворювачів дискретної інформації складають цифрові автомати. Цифровий автомат навідміну від комбінаційної схеми має деяке скінченне число різних внутрішніх станів.
Під дією
вхідного слова
цифровий автомат
переходить
з одного стану
в інший і видає
вихідне слово.
Вихідне слово
на виході цифрового
автомату
в
дискретний
момент часу
визначаєтся
вхідним словом,
яке поступило
в цей момент
часу на вхід
автомату, і
внутрішнім
станом автомату,
яке є результатом
дії на автомат
вхідних слів
в попередні
дискретні
моменти часу.
Комбінація вхідного слова і біжучого стану автомата в даному такті визначає не тільки вихідне слово, але й стан, в який автомат перейде до початку наступного такту.
Цифровий автомат містить пам’ять, що додається з запам’ятовуючих елементів (ЗЕ) - тригерів, елементів затримки та інших, що фіксують стан, в якому він знаходився. Комбінаційна схема не містить ЗЕ. Тому її називають автоматом без пам’яті або примітивним автоматом.
Структурна схема цифрового автомату містить ЗЕ1 - ЗЕk та комбінаційні схеми КС1 і КС2.
x1
q1
q1
ЗЕ1
y1
x2
y1
q2
ЗЕ2
y2
qk
y2
KC
KC1
KC2
x1
qk
x2
x1
ym
ym
ЗЕk
xn
xn
xn
а)
б)
Мал. № 1 Комбінаційна схема (а) і цифровий автомат (б).
Стан ЗЕ, що визначає стан автомату, передається в формі сигналів qi по ланцюгах прямого зв’язку на входи КС2 і по ланцюгах зворотнього звязку на входи КС1. На входи комбінаційних схем поступають також сигнали x1,...,xn з входу автомату.
Вихідне слово виробляється в КС2, причому вхідними змінними для неї служать букви вхідного слова і стани ЗЕ - стани автомату. Вихідні сигнали КС1 переводять автомат в нові стани, при цьому вхідними змінними для цієї схеми служать букви вхідного слова і стани ЗЕ. Одночасність появи нових значень вхідних сигналів на всіх входах пристрою досягається за допомогою тактових сигналів (синхросигналів), що забезпечують передачу інформації з ЗЕ на входи комбінаційної схеми одночасно з сигналами, що поступають на її входи з інших пристроїв.
В ряді випадків при аналізі автомата його заміняють автоматом з одним еквівалентним входом і з одним еквівалентним виходом і рахують, що еквівалентні вхідний сигнал x(t) і вихідний сигнал y(t) приймають значення з відповідним чином перетворених алфавітів P і S вхідних і вихідних сигналів.
Для задання цифрового автомата повинно бути вказано:
1) вхідний алфавіт
2) вихідний алфавіт
3) алфавіт стану
4) початковий стан автомату
5) функція переходу
6) функція виходів - однозначно визначає залежність відповідно стану автомата в момент дискретного часу і вихідного сигналу y(t), від стану автомата Q(t) і вхідного сигналу x(t) в момент дискретного часу t.
Використовуючи функції переходів і виходів, поведінку автомата можна описати рівняннями
(1)
(2)
де t=0,1,2 ...; Q(0)=Q0.
Рівнянням (1) і (2) відповідає автомат, вихідний сигнал якого залежить від стану автомата і від сигналу на його вході. Такий автомат називається автоматом Мілі.
В пристроях
ЕОМ широко
використовуються
так звані автомати
Мура,
в
яких вихідний
сигнал y(t) в момент
дискретного
часу t залежить
виключно від
стану автомата
Q(t) в цей момент
часу і незалежить
від вхідного
сигналу x(t).
Функціонування автомата Мура описується рівняннями
(3)
(4)
де t=0,1,2 ... ; Q(0)=Q0.
Функції
переходів і
виходів можуть
задаватись
різними способами,
наприклад в
вигляді таблиці
або з допомогою
графів. При
заданні в виді
графа стан
автомата зображається
вершинами, а
переходи з
стану в стан
- дугами. На дугах
вказується
значення вхідних
сигналів, які
викликають
відповідні
переходи. Вихідні
сигнали автомата
Мура вказуються
біля вершин
графа.
В випадку
автомата Мілі
вихідні сигнали,
що виробляються
перед переходом,
вказуються
на відповідних
дугах.
В теорії автоматів вводиться поняття повної системи переходів і повної системи виходів автомата. Якщо для двох любих станів Qi і Qj автомата є вхідний сигнал, який переводить автомат з стану Qi в Qj, то такий автомат називається автоматом з повною системою переходів. Автомат Мура має повну систему виходів, якщо вихідні сигнали різні для всіх його станів.
При побудові
вузлів ЕОМ, які
являються
цифровими
автоматами,
в якості запам’ятовуючих
елементів
(елементів
пам’яті) використовуються
елементарні
автомати.
Елементарними
автоматами
є автомати Мура
з двома станами,
що
володіють
повними системами
переходів і
виходів.
2.2
Декомпозиція
обчислювального
пристрою
на
операційний
і керуючий
блоки.
(Каган ст. 166-168)
Операційний блок складається з регістрів, суматорів і інших вузлів, які виконують прийом з зовнішнього середовища і зберігають коди слів, їх перетворення і видачу в зовнішнє середовище результату перетворення, а також видачу в керуючий блок і зовнішнє середовище, які повідомляють сигнали, які належать множині , про знаки і особливі випадки знаків операндів, їх окремих розрядів, особливих випадків значень проміжкових і кінцевих результатів операції.
Процес функціонування під час пристрою обробки цифрової інформації додається з послідовності тактових інтервалів, в яких операційний блок виробляє певні елементарні операції перетворення слів. Операційний блок виконує деякий набір елементарних перетворень інформації, наприклад, таких, як передача слова з одного регістра в інший, використання оберненого коду, зсув і т.д.. Виконання цих елементарних операцій ініціюється поступленням в операційний блок відповідних керуючих сигналів з деякої множини сигналів .
Елементарна функціональна операція (або деяка їхня комбінація), яка виконується за один тактовий інтервал і приводиться в дію одним керуючим сигналом , називається мікрооперацією.
В деякі такти можуть поступати декілька керуючих сигналів, викликаючи паралельне під час виконання відповідних мікрооперацій. Така сукупність мікрооперацій називається мікрокомандою. Частково, мікрокоманда може додаватися з одної мікрооперації.
Керуючий блок (або керуючий автомат) виробляє розподілену під час послідовності керуючих сигналів породжуючих в операційному блоці потрібну послідовність мікрооперацій.
Послідовність керуючих сигналів визначається керуючим командним кодом, який поступає в керуючий блок ззовні, і сигналами , залежним від операндів і проміжкових результатів перетворень.
Операційний блок задається його структурою, тобто складом вузлів і зв’язками між ними, і виконуваним операційним блоком набором мікрооперацій.
Послідовність мікрокоманд, що забезпечує виконання даної операції, називається мікропрограмою даної операції.
Функціонування обчислювального пристрою може бути описано сукупністю реалізуючих в ньому мікропрограм. В деяких випадках це зручно, хоча це і не єдиний можливий спосіб описування цифрових пристроїв.
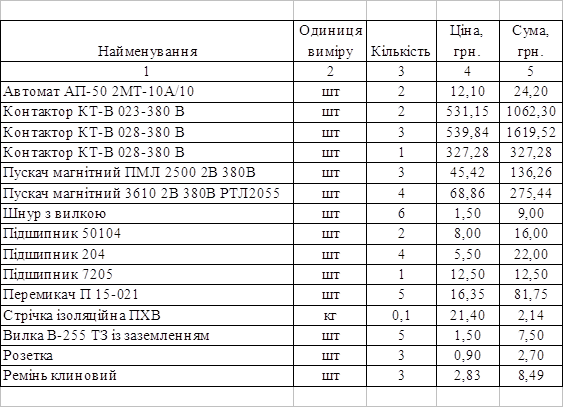
2.3 Кодування
десяткових
чисел
(Каган
ст. 50-51)
Таблиця 1.1 Двійково-десяткові коди
| Десяткові | Код | Код з | Код 2 з 5 | Десяткові | Код | Код з | Код 2 з 5 |
| 0 | 0000 | 0011 | 11 000 | 5 | 0101 | 1000 | 01 010 |
| 1 | 0001 | 0100 | 00 011 | 6 | 0110 | 1001 | 01 100 |
| 2 | 0010 | 0101 | 00 101 | 7 | 0111 | 1010 | 10 001 |
| 3 | 0011 | 0110 | 00 110 | 8 | 1000 | 1011 | 10 010 |
| 4 | 0100 | 0111 | 01 001 | 9 | 1001 | 1100 | 10 100 |
Код
8421. Найбільше
поширення в
обчислювальній
техніці знайшов
код 8421, в якому
кожна цифра
десяткового
числа замінюється
відповідним
чотирьохрозрядним
двійковим
числом. Цей код
зручний для
виконання
машиною
(а
не вручну)
перетворення
з десяткової
системи в двійкову
і навпаки. Цей
код аддитивний,
тобто сума
представлення
двох цифр є
кодом їх суми.
Але
використання
цього коду
пов’язане з
труднощами
пошуку переносу
в наступний
десятковий
розряд і важкістю
переходу до
зворотнього
і доповнюючого
коду для десяткових
чисел, що полегшує
виконання
алгебраїчної
дії.
Це пояснюється
тим, що код 8421 не
є самодоповнюючим,
тобто інверсія
його двійкових
цифр не дає
коду доповнення
десяткової
цифри до 9.
Код
з надлишком
3 зручний при
виконанні
арифметичних
операцій над
десятковими
цифрами, так
як він є самодоповнюючим.
Крім того, легко
визначається
перенос, так
як сума двох
доданків, кожне
з яких береться
з надлишком
3, вийде з надлишком
6, що виключає
лишні кодові
комбінації.
Для
отримання
правильного
коду суми з
отриманого
результату
відкидається
3.
В деяких випадках для використання суттєво, що код 0 містить 1 і тому легко відрізнити наявність коду 0 від попадання коду цифри. Код з надлишком 3 не дуже зручний для перетворення чисел з одної системи числення в іншу.
Код
2 з 5. Десяткові
цифри зображаються
п’ятьма розрядами,
з яких містять
дві 1. Ця надмірність
використовується
для контролю
правильної
передачі цифри.
В виразі кожної
цифри присутні
дві 1. Будь-яка
помилка в одному
розряді перетворює
0 в 1 або 1 в 0, в результаті
вийде більше
або менше двох
1, що вкаже на
помилку. При
одночасній
появі двох
помилок можливі
випадки,
коли
їх не вдається
знайти (якщо
0 в одному розряді
перетворюється
в 1, а в другому
розряді 1 в 0).
2.4 Управляючий
автомат
(Каган
стр.241 - 243)
Будь-який
цифровий пристрій
складається
з двох частин
– операційного
та управляючого
блоків. Операційний
блок характеризується
сукупністю
визначених
в ньому мікрооперацій,
кожна з яких
являє собою
деякий виконуваний
в даному операційному
блоці елементарний
акт передачі
або перетворення
інформації,
що
ініціалізується
поступленням
управляючого
функціонального
сигналу на
деяку управляючу
шину.
Будь-яка
команда, операція
або процедура,
що виконується
в операційному
блоці, описується
деякою мікропрограмою
і реалізується
за декілька
тактів,
в
кожному з яких
виконується
одна або декілька
мікрооперацій.
Для реалізації
команди, операції
або процедури
(мікропрограми)
необхідно на
відповідні
управляючі
шини операційного
блоку подати
певним чином
розподілену
в часі послідовність
управляючих
функціональних
сигналів.
Частина цифрового вичислювального пристрою, що призначена для генерації послідовностей управляючих функціональних сигналів, називаються управляючим блоком або управляючим пристроєм. Послідовність, що генерується управляючим блоком, задається кодом операції, що поступають на входи блоку, сигналами з операційного блоку, що несуть інформацію про особливості операндів і проміжкові та кінцеві результати операцій, а також з синхросигналами, що задають границі тактів.
Формально управляючий блок можна розглядати, як скінченний автомат, що визначається:
а) множиною двійкових вихідних сигналів V = {v1,…,vm}, що відповідають множині мікрооперацій операційного блоку. При vi = 1 розпочинається i-та операція;
б) множиною вхідних сигналів U = {u1,…un}, що відповідає блоку двійковому коду операцій і двійковому значенню освідомлюючих сигналів;
в) множиною мікропрограм;
г) по множинах вхідних і вихідних сигналів і мікропрограм визначається множина внутрішніх станів блоку Q = {Q0,…Qr}, потужність якого в процесі проектування старається мінімізувати. Управляючий автомат може бути заданий, як автомат Мура
Q(t + 1)=A[Q(t), u1(t),…,un(t)];
v1(t) = B1[Q(t)];
……………………………..
vm(t) = Bm[Q(t)];
або автомат Мілі
Q(t + 1)=A[Q(t), u1(t),…,un(t)];
v1(t) = B1[Q(t),u1(t),…,un(t)];
……………………………...
vm(t) = Bm[Q(t),u1(t),..,un(t)],
де функції переходів і виходів A, B визначаються заданою мікропрограмою.
Похожие работы
... В АБС АКБ «ПРОМІНВЕСТБАНК» ТА ОЦІНКА РІВНЯ ВРАЗЛИВОСТІ БАНКІВСЬКОЇ ІНФОРМАЦІЇ 3.1 Постановка алгоритму задачі формування та опис елементів матриці контролю комплексної системи захисту інформації (КСЗІ) інформаційних об’єктів комерційного банку В дипломному дослідженні матриця контролю стану побудови та експлуатації комплексної системи захисту інформації в комерційному банку представлена у вигляді ...

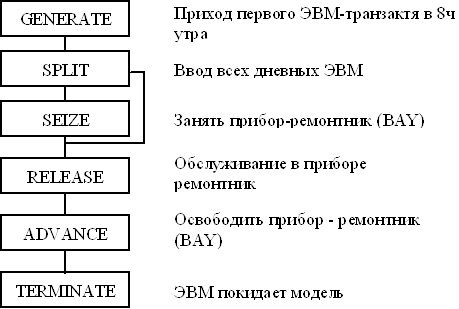
... , визначення основних характеристик одноканальних систем масового обслуговування вимагає великої обчислювальної роботи, в зв’язку з чим всі розрахунки робляться на комп’ютері. 1.2 Побудова моделей задач масового обслуговування (на прикладі роботи обчислювального центру (ОЦ)) 1.2.1 Модель для імітації виробничої діяльності ОЦ 1.2.1.1 Завдання Розробити модель для імітації виробничої ді ...
... рішень, зв’язаних із регулюванням витрат і з питань інвестиційної діяльності підприємства. Отже, управлінський облік це формування інформації для управління витратами з метою підвищення ефективності функціонування підприємства. Причому, відповідно до Закону «Про бухгалтерський облік і фінансову звітність в Україні», підприємства вправі самостійно обирати систему і форми ведення управлінського ...
... і вказівки до дипломного проектування для студентів спеціальності “Радіотехніка” /Укл. В.О.Дмитрук, В.В.Лисак, С.М.Савченко, В.І.Правда. – К.: КПІ, 1993. – 20 с. 8. Костиков В.Г., Парфенов Е.М., Шахнов В.А. Источники электропитания электронных средств. Схемотехника и конструирование: Учебник для вузов. – 2-е изд. – М.: Горячая линия – Телеком, 2001. – 344 с.: ил. 9. Перельман Б.Л. ...
0 комментариев