Постановка задачи
Реализуемые функции
Математическая модель РЛС
Математическая модель приемного устройства
Разработка программного комплекса
Разработка алгоритма реализации математических моделей
Описание интерфейса пользователя
Возникновение пожара
Пожаробезопасность
Электромагнитное излучение
Расчет параметров сетевого графика
Навигация
Реализуемые функции
Разработка системы для моделирования радиолокационной обстановки, которая бы позволила получать файлы на персональной ЭВМ, содержащие цифровое представление радиолокационной обстановки
99384
знака
10
таблиц
22
изображения
1.3 Реализуемые функции
После анализа технического задания были выделены следующие функции, которые должны выполняться разрабатываемым программным комплексом:
1. Функция организации интерфейса с пользователем. Программный комплекс в рамках организации интерфейса с пользователем должен реализовывать следующие функции:
– функция модификации данных – необходимо организовать ввод пользователем параметров, характеризующих конкретную РЛС и радиолокационную обстановку. Необходимо проверять вводимые данные на непротиворечивость и корректность. При разработке следует учесть, что с программным комплексом, возможно, будут работать пользователи, уровень подготовки которых для работы на персональной ЭВМ является невысоким;
– функция загрузки и сохранения данных – необходимо обеспечить возможность сохранения введенных пользователем данных и их последующую загрузку из типизированных файлов;
– функция формирования выходного файла – по результатам моделирования необходимо сформировать выходной файл, который может использоваться для проверки реальных устройств обработки сигналов.
2. Функция организации обмена данными с цифровыми устройствами обработки сигналов – необходимо организовать загрузку данных из файлов с радиолокационной обстановкой в реальные устройства обработки сигналов. Программный комплекс в рамках организации обмена данными с цифровыми устройствами обработки сигналов должен реализовывать следующие функции:
– функция определения доступных аппаратных ресурсов – при инициализации программного комплекса необходимо произвести определение доступных аппаратных ресурсов, поиск драйверов для данных устройств и их инициализацию;
– функция обмена данными с доступными аппаратными ресурсами – непосредственно организация обмена данными со специализированным устройством под управлением ранее выбранного драйвера.
3. Организация обмена данными с внешними приложениями – необходимо организовать обмен данными с другими приложениями в виде графической информации и информации, которая может быть использована для организации процесса моделирования, самими результатами моделирования.
4. Моделирование радиолокационной обстановки – по введенным пользователем данным, необходимо произвести расчет сигналов, образующих радиолокационную обстановку.
2 Разработка математического обеспечения
В настоящее время моделирование различных процессов и явлений широко используется для разнообразнейших исследований и разработок в различных областях науки и техники. Применение современной вычислительной техники позволяет получать достаточно точные модели, максимально точно описывающие моделируемое явление или процесс. Наиболее широко используется математическое и имитационное моделирование.
В основе математического моделирования лежат математические модели – каждый процесс или явление описывается при помощи математических уравнений, что требует серьезного математического аппарата. Реализация математических моделей на ПЭВМ возможна при использовании численных методов для реализации различных математических функций и операторов, что вносит погрешность в расчеты.
Имитационное моделирование подразумевает получение и использование модели, описывающее механику процесса или явления, т.е. то, как протекает процесс в реальной обстановке и что лежит в основе этого процесса. Имитационное моделирование, в основном, опирается на физические законы, для реализации которых также необходим аппарат математических функций.
Наиболее приемлемым способом для описания моделируемой предметной области в данном дипломном проекте может служить имитационное моделирование, основанное на математических моделях некоторых атомарных объектов. В качестве такого объекта, как будет показано ниже, можно взять точечную цель, а всю модель РЛС разделить на модели основных ее модулей. В этом случае будет достигнут компромисс между точностью модели и суммарными вычислительными затратами на реализацию модели.
2.1 Математическая модель радиолокационной обстановки
Радиолокационная обстановка характеризуется расположением и характером радиолокационных объектов (целей) в зоне действия РЛС, а также условиями окружающей среды, оказывающими влияние на распространение радиолокационных сигналов.
При распространении радиоволн следует учитывать явление дисперсии волн, т.е. зависимость фазовой скорости от частоты сигнала. Явление дисперсии наблюдается вследствие того, что коэффициент преломления атмосферы отличается от единицы, т.е. скорость электромагнитных волн в этом случае несколько меньше скорости света.
Другим существенным эффектом распространения радиоволн в реальной среде является искривление направления распространения или рефракция волн. Это явление может возникнуть в неоднородной среде, т.е. среде с изменяющимся от точки к точке коэффициентом преломления /4/.
Поскольку все эти эффекты слабо изменяют характеристики радиолокационного сигнала, то ими можно пренебречь.
Любая радиолокационная цель или объект характеризуется своим местоположением в пространстве, параметрами движения, эффективной отражающей поверхностью (ЭПР), а также функцией распределения ЭПР по поверхности объекта (для распределенных объектов).
Местоположение объекта (цели) характеризуется положением центра масс этого объекта (цели) в некоторой опорной системе координат /2/. В радиолокации наиболее часто применяют местную сферическую систему координат, начало которой находится в точке размещения антенны РЛС.
В наземной РЛС одна из осей координатной системы обычно совпадает с северным направлением меридиана, проходящего через позицию антенны РЛС, и местоположением цели Ц находится по результатам измерения наклонной дальности D, азимута α и угла места β (рисунок 2.1). При этом система неподвижна относительно земной поверхности.
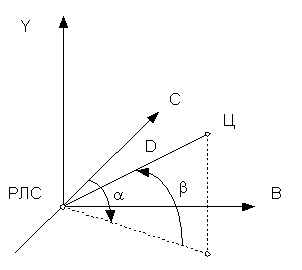
Рисунок 2.1 – Местные сферические координаты
Измерение дальности до цели радиотехническими методами основано на постоянстве скорости и прямолинейности распространения радиоволн, которые выдерживаются в реальных условиях с достаточно большой точностью. Измерение дальности сводится к фиксации моментов излучения зондирующего сигнала и приема отраженного сигнала и измерению временного интервала между этими двумя моментами. Время запаздывания отраженного импульса:
![]() (1)
(1)
где D – расстояние между РЛС и целью (рисунок 2.1), м;
c – скорость распространения радиоволн, м/с.
Для определения радиальной скорости движущегося объекта используют эффект Доплера /3/, который заключается в изменении частоты наблюдаемых колебаний, если источник и наблюдатель движутся друг относительно друга. Поэтому задача определения радиальной скорости сводится к определению частоты отраженных колебаний по сравнению с излучаемыми. Простейший и наиболее удобный для радиолокации вывод количественных соотношений при эффекте Доплера основан на рассмотрении процесса «передача – отражение – прием» как единого. Пусть в антенну поступают колебания:
![]() (2)
(2)
Отраженный от неподвижной цели и запаздывающий на время tЗ сигнал на входе приемника будет иметь вид:
![]() (3)
(3)
Здесь имеет место сдвиг фаз:
![]() (4)
(4)
а также постоянный сдвиг фаз φЦ, возникающий при отражении. При удалении от РЛС с постоянной радиальной скоростью дальность.
![]() (5)
(5)
где VP – радиальная скорость цели (рисунок 2.2), м/с.
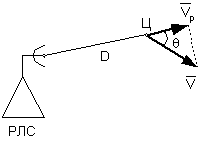
Рисунок 2.2 – Радиальная скорость цели относительно РЛС
Подставляя соответствующее значение ![]() из (1) в (4), получаем:
из (1) в (4), получаем:
 (6)
(6)
Частота отраженных колебаний, определяемая посредством производной фазы колебаний φС по времени, равна:
![]() (7)
(7)
Отсюда ![]() (8)
(8)
т.е. при удалении цели от РЛС частота отраженных колебаний ниже, чем излучаемых.
Величина
 (9)
(9)
именуется доплеровской частотой.
Мощность отраженного сигнала на входе приемника РЛС зависит от целого ряда факторов /4/ и, прежде всего, от отражающих свойств цели. Первичная (падающая) радиоволна наводит на поверхности цели токи проводимости (для проводников) или токи смещения (для диэлектриков). Эти токи являются источником вторичного излучения в разных направлениях.
Отражающие свойства целей в РЛС принято оценивать эффективной площадью рассеяния (ЭПР) цели S0:
 (10)
(10)
где ξ – коэффициент деполяризации вторичного поля (0 ≤ ξ ≤ 1);
PОТР = S·D0·П1 – мощность отраженного сигнала, Вт;
П1 – плотность потока мощности радиолокационного сигнала на сфере радиусом R в окрестности точки, где находится цель, Вт/м2;
D0 – значение диаграммы обратного рассеяния (ДОР) в направлении на радиолокатор;
S – полная площадь рассеяния цели, м2.
ЭПР цели представляет собой выраженный в квадратных метрах коэффициент, учитывающий отражающие свойства цели и зависящий от конфигурации цели, электрических свойств ее материала и отношения размеров цели к длине волны.
Данную величину можно рассматривать как некоторую эквивалентную цели нормальную радиолучу площадку площадью S0, которая, изотропно рассеивая всю падающую на нее от РЛС мощность волны, создает в точке приема ту же плотность потока мощности, что и реальная цель. Эффективная площадь рассеяния не зависит ни от интенсивности излучаемой волны, ни от расстояния между станцией и целью.
Поскольку измерение ЭПР реальных объектов на практике затруднено из-за сложной формы последних, то иногда при расчетах оперируют с величиной отраженной от радиолокационного объекта энергией или отношением отраженной энергии к излучаемой.
Если радиолокационный объект является распределенным, т.е. состоит из множества независимых излучателей, то для нахождения ЭПР применяют одну из двух моделей отражения. В обеих моделях цель представляется в виде совокупности n точечных элементов, среди которых нет преобладающего отражателя (первая модель), либо имеется один преобладающий отражатель (вторая модель), который дает стабильный отраженный сигнал.
В технической радиолокационной литературе /2, 4/ по радиолокации используют обобщенную модель Сверлинга с распределением вида:
 (11)
(11)
где ![]() – среднее значение ЭПР, м2.
– среднее значение ЭПР, м2.
Это выражение соответствует распределению c2 с 2k степенями свободы, где k определяет сложность модели отражения цели. При k = 1 получаем модель с экспоненциальным распределением ЭПР, а при k = 2 – модель цели в виде большого отражателя, меняющего в небольших пределах ориентацию в пространстве, или набора равноправных отражателей плюс наибольший.
Закон распределения амплитуд отраженного сигнала сводится к обобщенному закону Релея /4/:
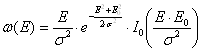 (12)
(12)
где E – амплитуда отраженного сигнала, В;
E0 – амплитуда отраженного сигнала от доминирующего излучателя, В;
σ2 – дисперсия ортогональных составляющих амплитуд, В2;
I0 – модифицированная функция Бесселя первого рода нулевого порядка:
 (13)
(13)
В случае группового излучателя, состоящего из n точечных излучателей, диаграмма распределения ЭПР по азимутам имеет весьма сложную лепестковую структуру, зависящую от взаимного расположения отражающих элементов и относительно расстояний между ними. Поэтому групповые цели в зависимости от их углового положения относительно линии визирования могут давать значительные колебания мощности отраженных сигналов. Эти колебания происходят относительно среднего уровня, пропорционального среднему значению ЭПР при некогерентном сложении. Одновременно с колебаниями мощности отраженного сигнала наблюдаются случайные изменения времени его запаздывания и угла прихода.
Для движущихся распределенных целей возникает явление интерференции колебаний вторичного излучения от различных точек, в основе которого лежит изменение взаимного расположения точечных отражателей цели. Эффект Доплера является следствием данного эффекта. Для описания явления применяется диаграмма обратного рассеяния (ДОР), которая характеризует зависимость амплитуды отраженного сигнала от направления /2/.
Кроме того, при облучении целей возникает явление деполяризации зондирующего сигнала, т.е. поляризация отраженной и падающей волны не совпадают. Для реальных целей имеет место флуктуирующая поляризация, т.е. все элементы поляризационной матрицы /1/ являются случайными и необходимо воспользоваться матрицей числовых характеристик этих случайных величин.
При статистическом подходе к анализу радиолокационных объектов для описания функций последних применяется корреляционная функция или корреляционная матрица /8/, которые характеризуют изменение параметров объекта во времени. Недостатком данной модели является сложность расчетов из-за необходимости применения статистических методов и сложность организации ввода исходных параметров.
Исходя из вышесказанного, для описания радиолокационного объекта необходимо знать его положение в пространстве, протяженность по дальности и азимуту (для распределенных объектов), ЭПР и модель ее распределения, модель движения объекта или закон изменения доплеровского приращения частоты отраженного сигнала, число точечных излучателей (для групповых излучателей).
Похожие работы

... информации. Набираемая информация отображается на дисплее, что позволяет контролировать ее правильность. Клавиатура и дисплей АИС должны быть независимыми от других навигационных устройств. Судовыми системами отображения АИС могут быть система отображения электронных карт (ECDIS, ECS, RCDS), РЛС, САРП или дисплей персонального компьютера. АИС и связанные с ней датчики информации питаются от ...
... , практически, не используются. Проблема информатизации Минторга может быть решена путем создания Автоматизированной Информационной системы Министерства Торговли РФ (АИС МТ РФ) в соответствии с настоящим Техническим предложением. ГЛАВА 2. МАТЕМАТИЧЕСКОЕ ОБЕСПЕЧЕНИЕ КОМПЛЕКСА ЗАДАЧ "СИСТЕМА ДОКУМЕНТООБОРОТА УЧЕРЕЖДЕНИЯ”. функции поиска и архивации 2.1. Постановка задачи и её спецификация ...
0 комментариев