Навигация
Разработка структуры процессора на основе МПА с жесткой логикой
25926
знаков
2
таблицы
11
изображений
СОДЕРЖАНИЕ
ВВЕДЕНИЕ
1. Анализ задания и разработка структурной (функциональной) схемы процессора.
2. Общее описание принципа работы процессора.
3. Временные диаграммы, описывающие выполнение микроопераций для каждой команды.
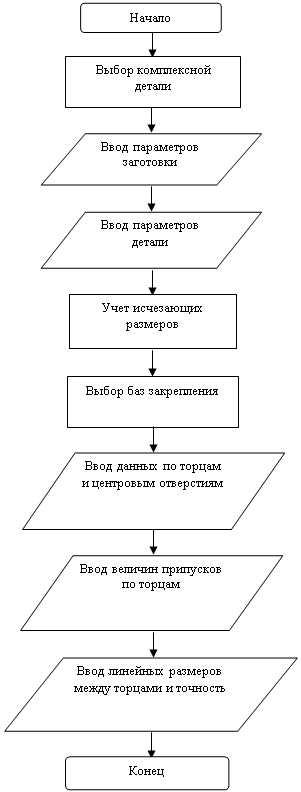
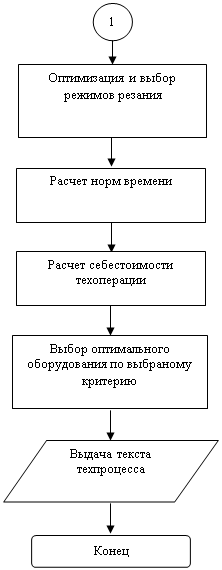
4. Содержательный алгоритм микропрограммы.
5. Синтез управляющего автомата на основе жесткой логики.
6. Создание описания отдельных узлов процессора и всего процессора средствами Active HDL.
7. Тестирование процессора и подтверждение правильности его работы с помощью временных диаграмм.
ВЫВОДЫ
ВВЕДЕНИЕ
В данной работе разрабатывается модель процессора выполняющего набор машинных команд.
ЭВМ с хранимой программой (stored program electronic computer) может быть определена как машина, обрабатывающая данные в соответствии с заранее определенными правилами (инструкциями); при этом программа (набор инструкций) и данные находятся в памяти машины. Для загрузки программы и данных в память, а также для вывода результатов обработки из памяти необходим какой-либо способ связи с внешними объектами. Этой цели служат устройства ввода-вывода.
Устройство управления ЭВМ управляет работой всей машины в целом. Оно принимает управляющую информацию от памяти, о том, какие действия надо осуществить и где в памяти расположены данные, над которыми должны производиться эти действия. После того как устройство управления определит, какую именно команду необходимо исполнить, оно выдает управляющие сигналы, позволяющие открыть и закрыть соответствующие вентили по всей системе, в результате чего данные, представленные в виде электрических сигналов, смогут поступать от одного функционального устройства к другому в процессе исполнения операции, заданной выбранной командой. Как только ALU заканчивает выполнять свою часть в данной операции, устройство управления может выдать необходимую управляющую информацию, разрешающую передачу результатов обратно в память или направляющую эти результаты к какому-нибудь устройству вывода; это делается для того, чтобы зафиксировать результаты на другом носителе, например на диске. В конце исполнения команды устройство управления заставляет машину выбрать и декодировать следующую команду.
Таким образом, каждой машиной управляют последовательности команд программы, написанной для решения конкретной задачи. Каждая из этих команд представляет собой простое обращение к устройству управления, сделанное для того, чтобы привести в действие встроенные в машину функциональные узлы (сумматор, регистры, счетчики), а также открыть и закрыть определенные вентили в цепях передачи данных; коммутация этих вентилей позволяет вводить в элементарные арифметические и логические функциональные узлы требуемые операнды, причем ввод их осуществляется в определенном порядке и в рамках определенной последовательности машинных циклов.
Устройство управления данного процессора необходимо построить на жёсткой логике. Конкретизировав задачу, определим, что необходимо выбрать схему процессора, и схему управляющего устройства. В данной работе будет использована схема процессора с одной магистралью.
Команды закодированы максимально просто, и не требуют больших ресурсов для своего выполнения. В тоже время данная схема имеет сравнительно небольшое количество элементов.
1 АНАЛИЗ ЗАДАНИЯ И РАЗРАБОТКА СТРУКТУРНОЙ (ФУНКЦИОНАЛЬНОЙ) СХЕМЫ ПРОЦЕССОРА
Разработать структурную схему процессора (операционного и управляющего автоматов) для выполнения набора машинных команд. Создать описание процессора на языке VHDL, провести тестирование.
Управляющий автомат должен представлять собой устройство с хранимыми в памяти микропрограммами управления ходом выполнения машинных команд.
Использовать одномагистральную структуру.
Реализовать следующие команды для исполнения в системе:
1. JMP # ;Переход в указанную часть программы
2. MOV A, #d ;Загрузка в аккумулятор константы
3. MOV Rn, #d ;Загрузка в регистр константы
4. RL А ;Сдвиг аккумулятора влево циклический
Примечание:
- обозначения команд процессора соответствуют мнемокодам языка ассемблера МК51.
- команды, могут размещаться в памяти в любой последовательности;
- константа #d размещается в следующем по порядку байте после команды;
- n – номер регистра 0 , 1, 2, 3;
- bit – 7, 6, 5, 4, 3, 2, 1, 0.
Структурная схема процессора показана на рис.1. В ней имеется двухвходовое АЛУ (хотя в этом нет необходимости в данном случае, однако это сделано для обеспечения универсальности данного устройства). Имеется банк из 4-х регистров общего назначения (РОН) R0-R3, которые работают только на запись в них, поскольку при настраивании их работы на чтение из них значительно усложнится общая структура автомата, возможно даже будет не возможно создать на одномагистральной шине.
В наличии блок интерпретации кода операции, построенный на счетчике шагов, а также на декодере инструкции и шифраторе, выдающий управляющие сигналы (AccIn, ALURL, RegIn, PCIn, PCInc, MBROut, IRIn, MemRd, Reset).
Все регистры являются 8-разрядными, таким образом, шина также будет 8-разрядной.
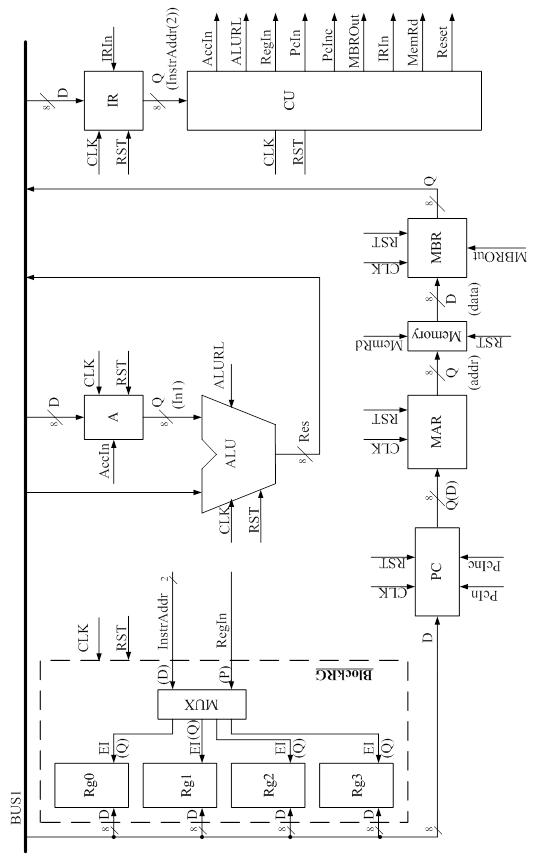
Рис. 1. Структурная схема процессора
Похожие работы
... недостаточно). Возможно включение комплекса в план учебного процесса, для обучения студентов. 2. Специальная часть разработка программного обеспечения для организации интерфейса программно-методического комплекса 2.1 Разработка технического задания на реализацию специальной части дипломного проекта Наименование программного изделия - "Интерфейс программно - методического комплекса для ...
... ребрами) изображают конструктивные и потоковые функциональные структуры [14]. Принципы построения функциональных структур технических объектов рассматриваются в последующих главах курса "Основы проектирования им конструирования" не включенных в настоящее пособие. Для систем управления существуют характеристики, которые можно использовать в качестве критериев для оценки структур. Одна из них - ...
... К. Сатпаева» для просмотра и ввода информации системы оперативно-диспетчерского контроля и управления, создаваемые на Visual Basic. Специфика используемого в системе оперативно-диспетчерского контроля и управления РГП «Канал им. К. Сатпаева» ПО такая, что разработка ПО, как таковая, может производиться только при создании самой системы. Применяемое ПО является полуфабрикатом. Основная задача ...
... ). Подпрограмма завершена, управление передается назад вызывавшему модулю. 6. Технико-экономическое обоснование 6.1 Пути снижения затрат за счет внедрения системы Внедрение автоматической системы управления маслонапорной установкой гидроэлектростанции решает следующие задачи - Полностью автоматическая система управления маслонапорной установкой не требует участия человека ...
0 комментариев