Навигация
Основы проектирования и конструирования
460103
знака
24
таблицы
39
изображений
Основы проектирования и конструирования
Конспект лекций для студентов специальности 060800
"Экономика и управление на предприятии"
Составитель: Капитонов Е.Н.
Тамбов - 2003.
1. Элементы прикладной механики 1.1 Статические, кинематические и динамические основы конструирования технических систем
Техника ставит перед инженерами множество задач, связанных с исследованием механического движения и механического взаимодействия.
Механическим движением называют происходящее с течением времени изменение взаимного положения материальных тел в пространстве.
Под механическим взаимодействием понимают действия материальных тел друг на друга, в результате которых происходит изменение движения этих тел или изменение их формы.
За основную меру этих действий принимают величину, называемую силой.
Наука о механическом движении и взаимодействии материальных тел называется механикой. По характеру рассматриваемых задач механика делится на статику, кинематику и динамику. Статика содержит учение о силах и об условиях равновесия материальных тел под действием сил.
В кинематике рассматриваются общие геометрические свойства движения тел.
Динамика изучает движение материальных тел под действием сил.
1.1.1 Основные понятия статики [1, с.9-17] 1.1.1.1 СилыРассматриваемые в механике величины можно разделить на скалярные, которые полностью характеризуются их числовыми значениями, и векторные, которые помимо числового значения характеризуются еще направлением в пространстве. Сила - величина векторная и характеризуется числовым значением, направлением и точкой приложения.
Системой сил называют совокупность сил, действующих на тело.
Если линии действия всех сил лежат в одной плоскости, система тел называется плоской, в противном случае - пространственной.
Силы, линии действия которых пересекаются, называются сходящимися.
Тело, которому из данного положения можно сообщить любое перемещение в пространстве, называется свободным.
Если одну систему сил, действующих на свободное твердое тело, можно заменить другой системой, не изменяя при этом состояния покоя или движения, в котором находится тело, то такие две системы сил называются эквивалентными.
Система сил, под действием которой свободное твердое тело может находиться в покое, называется уравновешенной.
Если данная система сил эквивалентна одной силе, то эта сила называется равнодействующей данной системы сил.
Силы, действующие на тело, можно разделить на внешние и внутренние.
Внешними называются силы, которые действуют на тело со стороны других тел, а внутренними - силы, с которыми части данного тела действуют друг на друга.
Сила, приложенная к телу в какой-нибудь одной его точке, называется сосредоточенной. Силы, действующие на все точки поверхности или объема тела называются распределенными.
С понятием силы связан ряд законов механики.
Закон параллелограмма сил
Две силы, приложенные к телу в одной точке, имеют равнодействующую, приложенную в той же точке и изображаемую диагональю параллелограмма, построенного на этих силах, как на сторонах.
Закон равенства действия и противодействия
При всяком действии одного материального тела на другое имеет место такое же численно, но противоположное по направлению противодействие.
Принцип отвердевания
Равновесие деформированного тела, находящегося под действием данной системы сил, не нарушится, если тело считать отвердевшим (абсолютно твердым).
1.1.1.2 Связи и их реакцииВсе, что ограничивает перемещение тела в пространстве, называется связью.
Тело, стремясь под действием приложенных сил осуществить перемещение, которому препятствует связь, действует на нее с некоторой силой, называемой силой давления на связь.
Соответственно, связь действует на тело с силой, равной по модулю и противоположной по направлению.
Эта сила называется реакцией связи. Направлена реакция связи в сторону, противоположную той, куда связь не дает перемещаться телу. Определение направления реакции - важная задача.
1.1.1.3 Сложение сил [1, с.18-31]
Основу сложения сил составляет упомянутое выше правило параллелограмма. Рассмотрим конкретный пример.
К стене шарнирно прикреплен кронштейн из шарнирно скрепленных между собой стержней АС и ВС, весом которых можно пренебречь. ÐВАС = 90°, ÐАВС = a. К кронштейну подвешен груз весом Р. Определить усилия в стержнях.
Решение: ![]() ,
, ![]() .
.
Моментом силы ![]() относительно центра О называется приложенный в О вектор
относительно центра О называется приложенный в О вектор ![]() , модуль которого равен произведению модуля силы F на ее плечо h, направленный перпендикулярно плоскости, проходящей через О и
, модуль которого равен произведению модуля силы F на ее плечо h, направленный перпендикулярно плоскости, проходящей через О и ![]() в ту сторону, откуда сила F видна вращающей тело против часовой стрелки.
в ту сторону, откуда сила F видна вращающей тело против часовой стрелки.
1.1.1.5 Пара сил. Момент пары [1, с.33-37]
Парой сил называется система двух равных по модулю, параллельных и направленных в противоположные стороны сил, действующих на абсолютно твердое тело.
Моментом пары сил называется вектор ![]() , модуль которого равен произведению модуля одной из сил пары на ее плечо и который направлен перпендикулярно плоскости действия пары в ту сторону, откуда пара видна стремящейся повернуть тело против часовой стрелки.
, модуль которого равен произведению модуля одной из сил пары на ее плечо и который направлен перпендикулярно плоскости действия пары в ту сторону, откуда пара видна стремящейся повернуть тело против часовой стрелки.
Метод приведение системы сил к центру дает теорема:
Силу, приложенную к абсолютно твердому телу, можно, не изменяя оказываемого ею действия, переносить из данной точки в любую другую точку тела, прибавляя при этом пару с моментом, равным моменту переносимой силы относительно точки, куда сила переносится.
Следствием является возможность переноса всех точек приложения сил в один центр, что определяется теоремой о приведении системы сил: любая система сил, действующих на абсолютно твердое тело, при приведении к произвольно выбранному центру О заменяется одной силой R, равной главному вектору системы сил и приложенной в центре приведения О, и одной парой с моментом ![]() , равным главному моменту системы сил относительно центра О.
, равным главному моменту системы сил относительно центра О.
Для равновесия любой системы сил необходимо и достаточно, чтобы главный вектор этой системы сил и ее главный момент относительно любого центра были равны нулю.
Изложенные вопросы теории позволяют находить реакции опор, без чего нельзя в дальнейшем рассчитать прочность конструкции.
При решении задач статики реакции связей всегда являются величинами заранее неизвестными; число их зависит от числа и вида наложенных связей. Величины реакций находятся из уравнений равновесия. Если число этих уравнений меньше, чем число реакций, такая система называется статически неопределимой. Это имеет место при наличии лишних связей.
1.1.1.7 Трение [1, с.64-72]
При стремлении двигать одно по поверхности другого в плоскости соприкосновения тел возникает сила сопротивления их относительному скольжению, называемая силой трения скольжения. Сила трения направлена в сторону, противоположную той, куда стремятся двигать тело.
![]() ,
,
где N - сила нормального давления;
f0 - статический или динамический коэффициент трения, в зависимости от того в покое или в движении находилось тело в момент приложения силы.
1.1.2 Основные сведения из кинематикиКинематикой называется раздел механики, в котором изучаются геометрические свойства движения тел без учета их массы и действующих на них сил.
1.1.2.1 Способы задания движения точкиДля задания движения точки можно применять один из трех способов: векторный, координатный, естественный.
Векторный способ.
Путь точка М движется по отношению к некоторой системе отсчета Oxyz. Положение этой точки в момент времени можно определить, задав ее радиус-вектор ![]() .,
.,![]() - переменный вектор (вектор-функция), зависящий от аргумента t (времени)
- переменный вектор (вектор-функция), зависящий от аргумента t (времени) ![]() . Это равенство и определяет закон движения точки в векторной форме. Аналитически вектор задается его проекциями на координатные оси.
. Это равенство и определяет закон движения точки в векторной форме. Аналитически вектор задается его проекциями на координатные оси.
В декартовых координатах
![]() ,
,
где ![]() - единичные векторы (орты).
- единичные векторы (орты).
Координатный способ задания движения точки. Чтобы знать положение точки в пространстве в любой момент времени, надо знать зависимости
![]() .
.
Это уравнения движения точки в прямоугольных декартовых координатах.
Естественный способ.
Естественным (или траекторным) способом задания движения удобно пользоваться в тех случаях, когда траектория движущейся точки известна заранее.
На траектории АВ выбирают точку О¢ за начало отсчета и измеряют от нее дугу S
![]() .
.
Это и есть закон движения точки М вдоль траектории.
1.1.2.2 Скорость и ускорение точки
Одной из основных кинематических характеристик движения точки является векторная величина, называемая скоростью точки.
Вектор скорости точки в данный момент времени равен первой производной от радиуса-вектора точки по времени
![]() .
.
Ускорением точки называется векторная величина, характеризующая изменение с течением времени модуля и направления скорости точки.
Вектор ускорения точки в данный момент времени равен первой производной от вектора скорости или второй производной от радиуса-вектора точки по времени
 .
.
Ограничимся рассмотрением одного примера. Движение точки задано уравнениями:
![]() ,
, ![]()
в системе СИ (м, с). Определить траекторию, скорость и ускорение точки.
Решение: Сначала исключим из уравнений t.
Для этого обе части первого уравнения умножим на 3, второго - на 4, а затем почленно вычтем из первого уравнения второе.
Получим
![]() , или
, или
.
Следовательно, траектория - прямая линия, проходящая через начало координат под углом с ![]() .
.
Для определения проекций скорости на оси координат берем первые производные от исходных уравнений по времени
![]() ,
, ![]() .
.
Тогда
![]() м/с.
м/с.
Аналогично находим вторые производные и ускорение.
![]() ,
, ![]() ,
, ![]() м/с2.
м/с2.
Направлены векторы ![]() и
и ![]() вдоль траектории. Подставляя в уравнение скорости t от 0 и более, убедимся, что при t > 1 скорость изменит направление. Есть еще движение тела - вращательное, плоскопараллельное [1, с.117-147].
вдоль траектории. Подставляя в уравнение скорости t от 0 и более, убедимся, что при t > 1 скорость изменит направление. Есть еще движение тела - вращательное, плоскопараллельное [1, с.117-147].
Динамикой называется раздел механики, в котором изучается движение материальных тел под действием сил. В основе динамики лежат законы, открытые И. Ньютоном (1687 г)
1.1.3.1 Законы динамики [1, с.181-184]
Первый закон (закон инерции): Изолированная от внешних воздействий материальная точка сохраняет свое состояние покоя или равномерного прямолинейного движения до тех пор, пока приложенные силы не заставят ее изменить это состояние. Второй закон (основной закон динамики) устанавливает, как изменяется скорость точки при действии на нее какой-либо силы: произведение массы материальной точки на ускорение, которое она получает под действием данной силы, равно по модулю этой силе, а направление ускорения совпадает с направлением силы ![]() . Третий закон (закон равенства действия и противодействия): Две материальные точки действуют друг на друга с силами, равными по модулю и направленными вдоль прямой, соединяющей эти точки, в противоположные стороны.
. Третий закон (закон равенства действия и противодействия): Две материальные точки действуют друг на друга с силами, равными по модулю и направленными вдоль прямой, соединяющей эти точки, в противоположные стороны.
Для свободной материальной точки задачами динамики являются: зная закон движения точки, определить действующую на нее силу; зная действующие на точку силы, определить закон движения точки.
1.1.3.3 Основные виды сил, рассматриваемые в задачах динамикиСила тяжести. Это постоянная сила ![]() , действующая на любое тело, находящееся вблизи земной поверхности.
, действующая на любое тело, находящееся вблизи земной поверхности.
Под действием силы ![]() тело при свободном падении имеет одно и то же ускорение
тело при свободном падении имеет одно и то же ускорение ![]() , называемое ускорением свободного падения или ускорением силы тяжести
, называемое ускорением свободного падения или ускорением силы тяжести ![]() . Сила трения. Это сила трения скольжения, модуль которой
. Сила трения. Это сила трения скольжения, модуль которой
![]() ,
,
где N - сила нормального давления; f -коэффициент трения.
Сила тяготения. Это сила, с которой два материальных тела притягиваются друг к другу в соответствии с законом всемирного тяготения.
![]() ,
,
где f - гравитационная постоянная (f = 6,673 × 10-3 м3/кг × с2);
т1, т2 - массы материальных точек;
r - расстояние между ними.
Сила упругости. Ее можно определить, исходя из закона Гука, согласно которому напряжение пропорционально деформации. Например, для пружины
![]() ,
,
с - коэффициент ее жесткости.
Сила вязкого трения. Это сила, действующая на тело, при его медленном движении в вязкой среде.
![]() ,
,
где v - скорость тела; m - коэффициент сопротивления.
Сила аэро-, гидродинамического сопротивления. Сила, тоже зависящая от скорости движения тела в воздухе, воде.
![]() ,
,
где r - плотность среды; S - площадь проекции тела на плоскость, перпендикулярную направлению движения; Сх - безразмерный коэффициент сопротивления.
1.1.3.4 Общие теоремы динамики [1, с. 201-219]Одной из основных динамических характеристик движения точки является количество движения. Количеством движения материальной точки называется векторная величина ![]() , равная произведению массы точки на ее скорость. Для рассмотрения теорем динамики необходимо ввести еще одно понятие - импульс силы. Элементарным импульсом тела называется векторная величина
, равная произведению массы точки на ее скорость. Для рассмотрения теорем динамики необходимо ввести еще одно понятие - импульс силы. Элементарным импульсом тела называется векторная величина ![]() , равная произведению силы
, равная произведению силы ![]() на элементарный промежуток времени dt:
на элементарный промежуток времени dt:
![]() .
.
Направлен элементарный импульс силы вдоль линии действия силы. Интегрированием этого выражения можно найти импульс силы за конечный промежуток времени t
 .
.
Теорема об изменении количества движения точки. Производная по времени от количества движения точки равна сумме действующих на точку сил
![]() .
.
Это, по существу, другой вариант второго закона динамики. Из этого равенства посредством разделения переменных и интегрирования можно получить математическое выражение теоремы об изменении количества движения точки
![]() .
.
Изменение количества движения точки за некоторый промежуток времени равно сумме импульсов всех действующих на точку сил за тот же промежуток времени.
Эту теорему можно непосредственно использовать при решении задач.
Пример: Точка с массой т = 2 кг движется по окружности с постоянной скоростью v = 4 м/с. Определить импульс действующей на точку силы за время, в течение которого точка проходит четверть окружности.
Решение:
![]()
Строя геометрически эту разность, находим из прямоугольного треугольника
![]() .
.
Поскольку по условию задачи
v1 = v0,![]() кг × м/с.
кг × м/с.
Работа силы. Мощность
Для характеристики действия, оказываемого силой на тело при некотором его перемещении, используют понятие о работе силы. Элементарной работой силы ![]() , приложенной в точке М называется величина (скалярная)
, приложенной в точке М называется величина (скалярная)
![]() ,
,
где Ft - проекция ![]() на касательную к траектории t;
на касательную к траектории t;
dS - модуль элементарного перемещения.
Работа силы на любом перемещении М0М1 равна взятому вдоль этого перемещения интегралу от элементарной работы.
Мощностью называется величина, определяющая работу, совершаемую в единицу времени
![]() .
.
Отсюда, мощность равна произведению касательной составляющей силы на скорость. Например, можно определить мощность локомотива для поезда определенного веса.
Теорема об изменении кинетической энергии точки.
Кинетической энергией материальной точки называется скалярная величина ![]() , равная половине произведения массы точки на квадрат ее скорости.
, равная половине произведения массы точки на квадрат ее скорости.
Теорема об ее изменении формулируется следующим образом: Изменение кинетической энергии точки при некотором ее перемещении равно алгебраической сумме работ всех действующих на точку сил на том же перемещении.
Данная теорема позволяет, зная, как при движении точки изменяется ее скорость, определить работу действующих сил, определить, как изменяется при движении скорость точки (вторая задача динамики).
1.1.3.5 Введение в динамику системыСистему материальных точек или тел, движение или равновесие которой рассматривается, называют механической системой. Если между точками (телами) механической системы действуют силы взаимодействия, то положение или движение каждой точки в ней зависит от положения и движения всех остальных. Классический пример - Солнечная система, в которой все тела связаны силами взаимного притяжения.
Действующие на механическую систему активные силы и реакции связей разделяют на внешние и внутренние.
Внешними называют силы, действующие на точки системы со стороны точек или тел, не входящих в состав данной системы.
Внутренними называют силы, с которыми точки или тела данной системы действуют друг на друга.
Внутренние силы обладают следующими свойствами:
геометрическая сумма (главный вектор) всех внутренних сил системы равна нулю;
сумма моментов (главный момент) всех внутренних сил системы относительно любого центра сил или оси равна нулю.
Масса системы. Центр масс.
Масса системы равна арифметической сумме масс всех точек или тел, образующих систему
![]() .
.
Распределение масс в системе определяется значениями масс тк ее точек и их взаимными положениями. В целом это распределение можно охарактеризовать некоторыми суммарными характеристиками. Ими являются координаты центра масс, осевые моменты инерции, центробежные моменты инерции. Чтоб определить эти понятия, нужно начать с определения центра тяжести.
Центром тяжести твердого тела называется неизменно связанная с этим телом точка, через которую проходит линия действия равнодействующей сил тяжести, действующих на частицы данного тела, при любом положении тела в пространстве. Координаты центра тяжести
 ;
;
 ;
;
 ,
,
где xк, yк, zк - координаты точек приложения сил тяжести ![]() , действующих на частицы тела;
, действующих на частицы тела;
Р - равнодействующая сил тяжести.
Учитывая, что
![]() ,
,![]() ,
,
из этих уравнений следует
![]() ;
;
![]() ;
;
![]() .
.
Эта замена справедлива лишь в однородном поле тяжести, для которого g = const. Геометрическая точка С, координаты которой определяются последними формулами, называется центром масс или центром инерции механической системы. Момент инерции относительно оси.
Моментом инерции тела (системы) относительно данной оси называется скалярная величина, равная сумме произведений масс всех точек тела на квадраты их расстояний от этой оси
![]() .
.
В качестве примера приведем значения Jz для некоторых тел.Момент инерции тонкого однородного стержня длиной l, массой М относительно оси, перпендикулярной стержню и проходящей через ее конец
 .
.
Момент инерции тонкого круглого однородного кольца радиусом R, массой М относительно оси, проходящей через центр кольца перпендикулярно его плоскости
![]() .
.
Момент инерции цилиндра относительно его оси
![]() .
.
Момент инерции сплошного шара относительно его оси
![]() .
.
Использование приведенных выше понятий позволяет вывести для систем теоремы динамики, некоторые из которых мы рассматривали раньше применительно к точке.
1.2 Основные понятия о важнейших свойствах конструкций технических систем: прочности, жесткости и устойчивости
Прочность, жесткость, устойчивость формы являются предметом науки, называемой сопротивлением материалов, которая является составной частью механики твердого тела.
1.2.1 Реальный объект и расчетная схемаИсследование реального объекта начинают с выбора расчетной схемы (модели). Для этого, перед тем как приступить к расчету конструкции, устанавливают, что в данном случае существенно и что несущественно. Необходимо произвести схематизацию объекта и отбросить все факторы, которые не оказывают значительного влияния на суть задачи. Это необходимо, поскольку учет всех факторов невозможен впоследствии их неисчерпаемости.
Реальный объект, мысленно освобожденный от несущественных особенностей, называется расчетной схемой. Для одного реального объекта может существовать несколько расчетных схем в зависимости от требуемой точности и целей расчета.
Построение расчетной схемы начинается со схематизации структуры и свойств материала. Принято рассматривать все материалы как сплошную среду - независимо от особенностей молекулярного строения вещества. Кроме того, среда считается однородной (несмотря на кристаллическое решение). Обычно среду считают изотропной (кроме анизотропных пластмасс).
Вводятся упрощения в геометрию реального объекта. Основным приемом здесь является приведение формы тела к схеме стержня. Под стержнем понимают тело, одно из измерений которого (длина) много больше двух других. Стержень может иметь поперечное сечение как постоянное, так и переменное вдоль оси. Многие сложные конструкции можно рассматривать, как состоящие из стержней. Их называют стержневыми системами. Часто стержень называют брусом или балкой.
Второй типовой геометрической схемой является оболочка. Это - тело, одно измерение которого (толщина) значительно меньше двух других.
В схеме делаются упрощения и в системе сил.
Например, нагрузку от подвески с грузом, распределенную по длине l, при расчете балки можно заменить сосредоточенной силой G.
1.2.2 Силы внешние и внутренниеСилы являются мерилом взаимодействия тел. Если конструкция рассматривается изолированно от окружающих тел, то действие последних на конструкцию заменяется силами, которые называются внешними. Примером сил, распределенных по объему тела, является вес. В число внешних сил включаются и реакции связей, дополняющие систему сил до равновесной.
Взаимодействие между частями рассматриваемого объекта внутри очерченной области объекта характеризуется внутренними силами. Внутренние силы возникают не только между отдельными взаимодействующими узлами конструкции, но и между всеми сложными частицами объекта.
Например, если стержень нагружен силами Р1, Р2, …, Рп, то в нем возникают внутренние силы, которые выявляются, если рассечь мысленно стержень сечением А на две части. Такой прием выявления внутренних сил называется методом сечений.
Так как связи между двумя половинами стержня устранены, их необходимо заменить системой внутренних сил. Из статики мы знаем, что из уравнений равновесия можно найти не закон распределения внутренних сил, а лишь их равнодействующую. Перенеся ее в центр тяжести сечения (что делается с введением пары сил), мы получим главный вектор R и главный момент М.
Выберем систему координат х, у, z таким образом, чтобы ось z была направлена нормально к плоскости сечения, а х и у располагались в этой плоскости.
Спроектировав R и М на эти оси, получим 6 составляющих: 3 силы и 3 момента. Эти составляющие называются внутренними силовыми факторами в сечении стержня.
Составляющая N, направленная по оси z, называется нормальной или продольной силой в сечении.
Силы Qx и Qy называются поперечными силами. Момент относительно оси z (Mк) называется крутящим моментом, а моменты Мх и Му - изгибающими моментами. Названные 6 составляющих находятся из уравнений равновесия для отсеченной части стержня.
1.2.3 НапряженияЧтобы характеризовать закон распределения внутренних сил по сечению, необходимо ввести для них числовую меру.
За нее принимается напряжение.
Рассмотрим в сечении А элементарную площадку DF в окрестности точки К.
В пределах этой площадки действует внутренняя сила DR (в другой площадке она может быть другой).
Тогда среднее напряжение в пределах площадки DF равно
![]() .
.
Поскольку среда непрерывна, мы можем уменьшать DF, стягивая ее в точку К. При DF ® 0.
![]() ,
,
[кгс/мм2 или МПа, 1 кгс/мм2 = 9,81 МПа].
Векторная величина р представляет собой полное напряжение в точке К в сечении А. Полное напряжение может быть разложено на 3 составляющие: по нормали к плоскости сечения и по двум осям в плоскости сечения. Составляющая по нормали s называется нормальным напряжением, составляющие в плоскости сечения t называются касательными напряжениями.
1.2.4 Перемещения и деформацииАбсолютно твердых тел в природе нет. Они обладают упругостью. Поэтому под действием внешних сил точки тела меняют свое положение в пространстве. Вектор, имеющий начало в точке недеформированного тела, а конец - в соответствующей точке деформированного, называется вектором полного перемещения точки. Его проекции на оси координат называются перемещениями по осям (u, v, w). Кроме линейных существуют угловые перемещения.
Если на систему наложены связи, исключающие ее перемещение в пространстве как жесткого целого, система называется кинематически неизменяемой. Именно эти системы изучает сопромат.
Для того, чтобы характеризовать интенсивность изменения формы и размеров тела, рассмотрим точки А и В на теле до и после приложения к нему каких-то сил.
Первоначально расстояние между точками S.
В результате изменения формы тела S увеличилось на DS. Отношение ![]() называют средним удлинением на отрезке S. Приближая В к А, в пределе получим
называют средним удлинением на отрезке S. Приближая В к А, в пределе получим
![]() ,
,
где ![]() - линейная деформация.
- линейная деформация.
Для большинства материалов это малая величина.
Кроме линейной деформации есть и понятие угловой деформации (первоначально прямого угла).
1.2.5 Закон Гука
Закон Гука определяет линейную зависимость между напряжением и деформацией
![]() ,
,
где коэффициент пропорциональности Е является физической характеристикой конструкционного материала и называется модулем упругости (Юнга) первого рода. Он определяется экспериментально.
1.2.6 Растяжение и сжатие![]()
Обычным является растяжение стержня силами Р, приложенными к его концам. Если воспользоваться методом сечений, то становится очевидным, что во всех поперечных сечениях возникают нормальные силы N = P.
Сжатие в обычных случаях отличается от растяжения лишь знаком силы. Естественно предположить, что для однородного стержня внутренние силы распределены по сечению равномерно.
Тогда
![]() или
или
![]() ,
,
где F - площадь поперечного сечения стержня.
Теперь на основании закона Гука может быть определено и удлинение стержня.
Подставив в уравнение закона Гука значения t и e, получим
![]() , откуда
, откуда ![]() .
.
Если в системе имеется связей больше, чем необходимо для обеспечения ее равновесия, то для определения внутренних сил в системе уравнений статики оказывается недостаточно. Такие системы называются статически неопределимыми. Раскрытие статической неопределимости возможно только путем составления уравнений, дополняющих число уравнений статики до числа неизвестных. Эти дополнительные уравнения отражают особенности геометрических связей, наложенных на деформируемые системы, и называются уравнениями перемещений. Рассмотрим пример: Прямой однородный стержень жестко закреплен по концам и нагружен продольной силой Р, приложенной на расстоянии одной трети длины от верхней заделки. Величина поперечного сечения стержня F. Требуется определить напряжения, возникающие в стержне. Система статически неопределима, поскольку реакции опор нельзя определить из одного уравнения
![]() .
.
Уравнение перемещений должно отразить тот факт, что общая длина стержня не меняется. На сколько удлинится верхняя часть, на сколько сократится нижняя.
![]() или
или
 , откуда
, откуда
![]() .
.
Решая это уравнение совместно с уравнением равновесия, находим:
![]() ,
, ![]() ,
, ![]() .
.
Рассечем стержень, растягиваемый продольными силами, сечением, наклонным по отношению к поперечному под углом a. Полное напряжение на площадке сечения Р.
Равнодействующая внутренних сил в сечении должна быть направлена по оси стержня и равна величине растягивающей силы s F, т.е.
![]() ,
,
где Fa - площадь косого сечения,
 .
.
Таким образом, полное напряжение на наклонной площадке ![]() .
.
Раскладывая это напряжение по нормали и по касательной к наклонной площадке, находим
![]() ,
, ![]() .
.
Подставив сюда значения р, получим
![]() ,
, ![]() .
.
Следовательно, даже при чистом растяжении в определенном направлении действуют касательные напряжения, и может иметь место сдвиг.
Наблюдения показывают, что удлинение стержня в осевом направлении сопровождается уменьшением его поперечных размеров, т.е. есть и поперечная деформация.
![]() ,
, ![]() .
.
При этом установлено, что в пределах применимости закона Гука поперечная деформация пропорциональна продольной.
![]() ,
,
где m - безразмерный коэффициент пропорциональности, называемый коэффициентом Пуассона.
Это - характеристика свойств материала. Для металлов m = 0,25 ¸ 0,35.
Таким образом, стержень, изображенный на последнем рисунке, вытянется в длину и сузится в поперечном направлении. Стороны прямоугольника АВСD соответственно изменят свою длину, прямоугольник перекосится. Анализируя происшедшую угловую деформацию можно установить величину модуля упругости второго рода или модуля сдвига
 .
.
1.2.9 Испытание материалов на растяжение и сжатие
Для решения практических задач необходимо иметь числовые характеристики ряда прочностных свойств материалов. Поэтому существует целый ряд устройств и методов механических испытаний.
Так, испытание стандартного образца на растяжение позволяет получить диаграмму растяжения. На диаграмме несколько зон:
ОА - зона упругости; здесь материал подчиняется закону Гука;
АВ - зона общей текучести (Р растет мало, а DL непропорционально много); эта зона обнаруживается редко, она мала;
ВС - зона упрочнения; здесь удлинение образца сопровождается возрастанием нагрузки, но на 2 порядка более медленным, чем в зоне упругих деформаций, начинает образовываться шейка - местное сужение образца.
В дальнейшем удлинение образца происходит с уменьшением силы, хотя среднее напряжение в поперечном сечении шейки и возрастает. Удлинение образца носит в этом случае местный характер, поэтому участок СD называется зоной местной текучести. В точке D - разрушение образца.
Такие испытания позволяют установить ряд механических характеристик материала. Сюда, в частности, относятся следующие.
Наибольшее напряжение, до которого материал следует закону Гука, называется пределом пропорциональности.
Наибольшее напряжение, до которого материал не получает остаточных деформаций, называется пределом упругости.
Напряжение, при котором происходит рост деформаций без заметного увеличения нагрузки, называется пределом текучести.
Отношение максимальной силы, которую способен выдержать образец, к его начальной площади поперечного сечения называется пределом прочности.
Кроме перечисленных прочностных характеристик при испытаниях на растяжение определяют относительное удлинение при разрыве.
Способность материала без разрушения получать большие остаточные деформации называется пластичностью. Это свойство важно для обработки металлов давлением.
Противоположным пластичности свойством является хрупкость, т.е. способность материала разрушаться без образования заметных остаточных деформаций.
Деление материалов на пластичные и хрупкие в значительной мере условно, т.к это свойство зависит от условий проведения эксперимента (Т, Р).
Одной из основных технологических операций, меняющих свойства материала, является термообработка.
Легко контролируемым в производственных условиях свойством является твердость (определяемая по глубине вдавливания при эталонной нагрузке шарика или алмазного конуса).
1.2.10 Влияние температуры и фактора времени на механические характеристики материалаЕсли испытания образцов на растяжение производить при различных температурах образца, то можно построить зависимость свойств материала от температуры.
Например, отмечено, что легированные стали и цветные сплавы при повышении температуры обнаруживают монотонное возрастание d и снижение sТ и sВ.
Существенным является, и влияние фактора времени (особенно для полимеров). Изменение во времени деформаций и напряжений, возникающих в нагруженной детали называется ползучестью.
Частным проявлением ползучести является рост необратимых деформаций при постоянном напряжении. Это явление называется последействием.
Другим проявлением ползучести является релаксация - самопроизвольное изменение во времени напряжений при неизменной деформации.
Основными механическими характеристиками материала в условиях ползучести являются предел длительной прочности и предел ползучести.
Пределом длительной прочности называется отношение нагрузки, при которой происходит разрушение растянутого образца через заданный промежуток времени, к первоначальной площади сечения.
Пределом ползучести называется напряжение, при котором пластическая деформация за заданный промежуток времени достигает заданной величины.
Среди различных типов статических нагрузок особое место занимают периодически изменяющиеся или циклические нагрузки. Прочность материалов в условиях таких нагрузок связана с понятиями выносливости или усталости материала.
Своего подхода требует анализ прочности при динамических нагрузках. Поскольку при быстром нагружении развитие пластических деформаций затруднено, главенствующим механизмом разрушения оказывается развитие трещин, и материал обостренно воспринимает местные повышенные напряжения. Это потребовало создания специального метода испытания материала на чувствительность к хрупкому разрушению - испытания на ударную вязкость.
1.2.11 Коэффициент запасаОсновным в сопромате является метод расчета конструкции по напряжениям. В этом искомый размер находят из условия
![]() ,
,
где smax - максимальное напряжение, которое может возникнуть в элементе конструкции в процессе эксплуатации; [s] - допускаемое напряжение.
Для пластичных материалов допускаемое напряжение обычно находят по пределу текучести
 ,
,
где п Т - коэффициент запаса по пределу текучести.
Для хрупких материалов [s] находят по пределу прочности
 ,
,
где п В - коэффициент запаса по пределу прочности.
Выбор п осуществляют исходя из условий работы детали, ответственности, точности расчета и т.д.
1.2.12. Кручение 1.2.12.1 Чистый сдвиг
Рассматривая растяжение, мы говорили о том, что, взяв вместо поперечного сечения наклонное, мы получим в плоскости сечения касательные напряжения. Положим, что такое напряженное состояние, когда на гранях выделенного (сечениями) элемента возникают только касательные напряжения t. Такое напряженное состояние называют чистым сдвигом. Наиболее просто чистый сдвиг можно получить нагружением пластины, захваченной в жесткие шарнирно соединенные накладки. Во всех точках пластины будут
![]() ,
,
где d - толщина пластины.


Другой пример - тонкостенная цилиндрическая трубка, нагруженная моментами, приложенными в торцевых плоскостях. В этом случае
![]() ,
,
где R - радиус трубы.
В результате возникают угловые деформации, связанные с t соотношением
![]() , где
, где  .
.
Под кручением понимается такой вид нагружения, при котором в поперечных сечениях стержня возникает только крутящий момент.д.ругие силовые факторы равны нулю. При расчете стержня на кручение решают две основные задачи. Требуется определить напряжения и найти угловые перемещения в зависимости от внешних моментов. Механизм деформирования стержня с круглым сечением представляют следующим образом: считают, что каждое поперечное сечение под действием внешних моментов поворачивается в своей плоскости как жесткое целое. Это - гипотеза плоских сечений. Выделим из стержня двумя поперечными сечениями элемент dz, а из него двумя цилиндрическими поверхностями с радиусами r и r + dr выделим элементарное кольцо.

Правое торцевое сечение при кручении поворачивается относительно левого на угол dj. Образующая цилиндра АВ поворачивается при этом на угол g и занимает положение АВ¢. Отрезок ВВ¢ равен с одной стороны ![]() , а с другой
, а с другой ![]() (поскольку углы малые). Угол g представляет собой не что иное, как угол сдвига цилиндрической поверхности. Обычно обозначают
(поскольку углы малые). Угол g представляет собой не что иное, как угол сдвига цилиндрической поверхности. Обычно обозначают ![]() .
.
Эта величина называется относительным углом закручивания. С учетом этого получаем ![]() .
.
По закону Гука для сдвига ![]() . Крутящий момент, вызывающий в кольце такие напряжения
. Крутящий момент, вызывающий в кольце такие напряжения ![]() .
.
Подставив сюда значение t, получим ![]() . Интеграл
. Интеграл ![]() (см4) называется полярным моментом инерции сечения Jр.
(см4) называется полярным моментом инерции сечения Jр.

Таким образом, ![]() или
или  . Произведение
. Произведение ![]() называют жесткостью стержня при кручении.
называют жесткостью стержня при кручении.
На основе всего изложенного решение названных выше основных задач при расчете на кручение выглядит следующим образом, если Мк по длине не меняется:
 ,
,
где l - расстояние между сечениями, для которых определяется j.
Величина  называется полярным моментом сопротивления (см3). Окончательно
называется полярным моментом сопротивления (см3). Окончательно  .
.
Величины геометрических характеристик сечения Jp и Wp можно найти интегрированием. Для круглого сплошного сечения получим
 ,
,  .
.
Для кольцевого сечения
 ,
,  .
.
Аналогичные решения существуют для некруглых сечений, но они более сложны.
1.2.13. Геометрические характеристики плоских поперечных сечений стержняДля решения задач, прежде всего, связанных с изгибом, возникает необходимость оперировать некоторыми геометрическими характеристиками поперечных сечений стержня.
1.2.13.1 Статические моменты
Для некоторого поперечного сечения возьмем интегралы по всей площади сечения
![]() ,
, ![]() .
.
Первый интеграл называется статическим моментом сечения относительно оси х, второй - относительно оси у. При параллельном переносе осей статический момент меняется на величину, равную произведению площади F на расстояние между осями.
Очевидно, можно подобрать такое положение оси, при котором статический момент относительно этой оси обращается в нуль. Такая ось называется центральной. Точка пересечения центральных осей называется центром тяжести сечения.
1.2.13.2 Моменты инерции сеченияРассмотрим еще три следующих интеграла
![]() ;
; ![]() ;
; ![]() .
.
Первые два интеграла называется осевыми моментами инерции сечения относительно осей х и у. Третий - центробежный момент инерции относительно осей х, у. Минимальный момент инерции получается относительно центральной оси.
Следует отметить еще одно определение: оси, относительно которых центробежный момент инерции равен нулю, а осевые моменты принимают экстремальные значения, называются главными осями. Осевые моменты инерции относительно главных осей называются главными моментами инерции.
1.2.14. ИзгибПод изгибом понимается такой вид нагружения, при котором в поперечных сечениях стержня возникают изгибающие моменты. Если изгибающий момент в сечении является единственным силовым фактором, изгиб называется чистым. Однако чаще всего наряду с изгибающими моментами в сечениях возникают и поперечные силы. В этом случае изгиб называют поперечным.
Стержень, работающий в основном на изгиб, часто называют балкой. Для расчета стержня на изгиб необходимо, прежде всего, научиться определять законы изменения внутренних силовых факторов, т.е. научиться строить эпюры изгибающих моментов и поперечных сил. Рассмотрим пример.
Дана двухшарнирная балка, на которую действует сила Р. Определить ее напряженное состояние. Анализ внутренних сил начинают с определения полной системы внешних сил. В данном случае необходимо определить реакции опор. Из условия равновесия:
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
На расстоянии z от левой опоры проведем сечение с и разделим балку мысленно на две части. Для того, чтобы каждая из частей находилась в равновесии, в сечении с необходимо приложить силу Q и момент Мизг.
Для их определения рассмотрим левую часть, как имеющую более простую нагрузку. Сумма моментов сил относительно центральной поперечной оси в сечении с
![]() ,
,
отсюда
![]() ,
,
т.е. изгибающий момент в сечении является суммой моментов относительно поперечной оси сечения всех сил, расположенных по одну сторону от этого сечения. Меняя z от 0 до а, получим данные для построения эпюры моментов для левой половины балки
![]() .
.
Аналогично для правой части
![]() .
.
Эпюра Мизг является кусочно линейной и на всей длине балки расположена сверху (при построении эпюры на сжатых волокнах). Это значит, что ось изогнутой балки, называемая упругой линией, всюду направлена вогнутой стороной вверх, что в данном случае достаточно очевидно.
Определим поперечные силы. Из условия равновесия левой или правой части стержня
![]() или
или
![]() .
.
Во всех случаях величина поперечной силы для прямого стержня равна сумме проекций на плоскость сечения всех внешних сил, лежащих по одну сторону от сечения. Другие примеры:
![]() ;
;
![]() .
.
Мизг достигает максимума при ![]()
 .
.
![]() .
.
Чистый изгиб - это наиболее простой случай изгиба. Под действием момента М стержень изогнется. Поскольку во всех сечениях М одинаков, изменение кривизны будет одним и тем же, т.е. ось однородного стержня принимает форму дуги окружности. При этом поперечные сечения стержня остаются плоскими и только поворачиваются на некоторый угол. Это утверждение именуется гипотезой плоских сечений.
При изгибе наружные относительно центра кривизны волокна растягиваются, внутренние сжимаются. Следовательно, есть волокна, сохраняющие первоначальную длину. Геометрическое место точек, удовлетворяющих условию e = 0 и, соответственно, s = 0 называется нейтральной линией сечения. Нормальные напряжения в сечении меняются от smax до smin.
Для волокна, расположенного на расстоянии у от нейтральной линии
 .
.
На наиболее удаленных поверхностях
 .
.
Отношение ![]() называется моментом сопротивления сечения при изгибе Wx. Таким образом,
называется моментом сопротивления сечения при изгибе Wx. Таким образом,
 .
.
Для стержня прямоугольного сечения со сторонами b и h
![]() ,
, ![]() ,
,  .
.
Для стержня круглого сечения
 ,
, ![]() ,
,  .
.
Нетрудно догадаться, что наиболее удаленные от нейтральной линии слои сечения более нагружены. Поэтому с целью рационального использования металла эти части стержня, работающего на изгиб, должны быть шире. Отсюда - появление таких профилей, как швеллер, тавр, двутавр, рельс и т.д.
1.2.14.2 Напряжения при поперечном изгибеПри чистом изгибе возникают только нормальные напряжения в поперечных сечениях. Наличие же поперечных сил вызывает появление касательных напряжений в плоскости сечения, что сопровождается появлением угловых деформаций g.
Величина касательных напряжений может быть определена по формуле Журавского
 ,
,
где Q - поперечная сила;
Sx* - статический момент относительно оси х части площади, расположенной выше продольного сечения, проведенного на расстоянии у от оси х (Меняя у, можно найти t по всему сечению. На наружных поверхностях Sx* = 0, поскольку площадь сечения выше ![]() равна нулю. Следовательно t = 0);
равна нулю. Следовательно t = 0);
Jx - момент инерции сечения относительно оси х;
b - ширина сечения.
1.2.15. Прочность при циклически изменяющихся напряженияхЕсть детали (вагонная ось, долото пневмомолотка) у которых нагрузка меняется с каждым оборотом, тактом. Это приводит к усталостным разрушениям. Такая нагрузка называется циклической. Если нагрузка за один цикл меняется от smax до smin, то
 .
.
Это отношение называется коэффициентом асимметрии цикла. При Rs = - 1 цикл называется симметричным. Циклы, имеющие одинаковые значения Rs называются подобными.
Процесс образования трещины при переменных напряжениях связан с накоплением пластических деформаций. Существует специальная методика исследования материалов на усталость.
Накопленный опыт испытаний стальных образцов показывает, что если образец не разрушился до 107 циклов, то вероятнее всего он не разрушится и при более длительном испытании. Для цветных металлов и твердых закаленных сталей требуется 108 циклов. Число циклов, до которого ведется испытание, называется базой испытаний.
Наибольшее значение максимального напряжения цикла, при котором образец не разрушается до базы испытания называется пределом выносливости sп.
Для сталей предел выносливости при изгибе составляет примерно половину от предела прочности
![]() МПа;
МПа;
для высокопрочных сталей
![]() МПа;
МПа;
для цветных металлов
![]() МПа.
МПа.
Аналогично испытаниям на изгиб можно определить предел выносливости на кручение:
для обычных сталей ![]() ;
;
для хрупких материалов ![]() .
.
Одним из основных факторов, которые необходимо учитывать при практических расчетах на циклическую прочность, является концентрация напряжений. Ими являются любые резкие изменения формы детали - проточки, отверстия, углы. Одно из средств снижения концентрации - галтели, скругления.
Основными показателями оценки местных напряжений у концентраторов напряжений являются теоретические коэффициенты концентрации напряжений:

для нормальных напряжений и

для касательных напряжений.
Здесь sном и tном - напряжения, рассчитанные без учета концентрации напряжений (номинальные).
Величина теоретических коэффициентов для типовых конструкционных элементов приводится в справочниках. Наиболее достоверные результаты получают на основе натурных испытаний образца.
1.2.16. Понятие об устойчивости
Под устойчивостью понимают свойство системы сохранять свое состояние при внешних воздействиях. Наиболее простой случай - потеря устойчивости центрально сжатого стержня. В этом случае целью расчета является определение предельной или критической силы, превышение которой вызовет потерю устойчивости.
1.2.17. Динамическое нагружениеРаспространенным случаем динамического нагружения является ударная нагрузка. Точный расчет сложен. В инженерных расчетах используют коэффициент динамичности, который показывает во сколько раз прогиб при ударе больше прогиба, возникающего при статическом приложении такой же нагрузки. В том же отношении изменяются внутренние силы и напряжения
![]() .
.
В теоретической механике рассматривают материальную точку и тело, как совокупность материальных точек, находящихся в покое или движении, под воздействием сил. В ТММ делается шаг к более сложным системам: механизмам и машинам.
Механизм является системой твердых тел. Поэтому механизмы имеют как весьма простое, так и достаточно сложное и разнообразное строение (структуру).
Строением механизма определяются такие его важнейшие характеристики, как виды осуществляемых движений, способы их преобразования, число степеней свободы. Формирование механизма, т.е. соединений отдельных его частей в единую систему сопровождается наложением связей. Правильное их распределение в строении механизма в сильной степени предопределяет его надежную эксплуатацию. Поэтому при проектировании нужно из множества разнообразных механизмов выбрать самый подходящий и правильно подобрать его основные структурные элементы.
А для этого нужно знать основные виды современных механизмов, их структурные характеристики, закономерности их строения. Это и составляет предмет ТММ.
Машина представляет собой комплекс механизмов, предназначенных для выполнения технологического процесса в соответствии с заданной программой.
1.3.1 Основные определенияТвердые тела, из которых образуется механизм, называются звеньями. При этом имеются в виду как абсолютно твердые, так и деформируемые и гибкие тела.
Звено - либо одна деталь, либо совокупность нескольких деталей, соединенных в одну кинематически неизменяемую систему. Звенья различают по конструктивным признакам (вал, шатун, поршень, зубчатое колесо) и по характеру их движения. Например, звено, совершающее полный оборот вокруг неподвижной оси, называют кривошипом, при неполном обороте - коромыслом, звено, совершающее поступательное прямолинейное движение - ползуном и т.д. Неподвижное звено механизма для краткости называют стойкой.
Кинематической парой называют подвижное соединение двух соприкасающихся звеньев.
Совокупность поверхностей, линий и точек звена, входящих в соприкосновение (контакт) с другим звеном пары, называют элементом пары.
Кинематические пары во многом определяют работоспособность и надежность машины, поскольку через них передаются усилия от одного звена к другому; в кинематических парах, вследствие относительного движения возникает трение, происходит износ.
Систему звеньев, образующих между собой кинематические пары, называют кинематической цепью. Различают замкнутые и незамкнутые кинематические цепи. В замкнутой цепи каждое звено входит не менее, чем в две кинематические пары, в незамкнутой цепи есть звенья, входящие только в одну кинематическую пару.
Основываясь на понятии кинематической цепи, можно дать более конкретное определение механизма: механизм - это кинематическая цепь, в состав которой входит неподвижное звено, и число степеней свободы которой равно числу обобщенных координат, характеризующих положение цепи, относительно стойки. Так, у кривошипно-шатунного механизма взаимное положение звеньев однозначно определяется углом поворота кривошипа j1. Это и есть обобщенная координата, и поскольку она одна, степень свободы механизма W = 1.
Различают входные и выходные звенья механизма. Выходным называют звено, совершающее то движение, для которого предназначен механизм. Входным называют звено, которому сообщается движение, преобразуемое механизмом в требуемое движение выходного звена.
При изображении механизма различают его структурную (принципиальную схему с применением условных обозначений звеньев и пар без указания их размеров) и кинематическую схему с размерами, необходимыми для кинематического расчета.
1.3.2 Классификация кинематических парПару называют низшей, если элементы звеньев соприкасаются только по поверхности, и высшей, если контакт только по линии или в точках (подшипники качения и скольжения).
Кинематические пары классифицируют по числу H степеней свободы в относительном движении звеньев и по числу S условий связи (ограничений).
Так как для свободного тела в пространстве число степеней свободы равно 6, то H и S связаны соотношением H = 6 - S. При S = 0 пары не существует, а имеются два тела, двигающихся независимо друг от друга. При S = 6 кинематическая пара становится жестким соединением, т.е. одним звеном. Отсюда классификация пар - одноподвижные, 2х, 3х, 4 х и 5и -подвижные.
Примеры: вращательная одноподвижная (шарнир дверной); поступательная одноподвижная (спичечный коробок); цилиндрическая двухподвижная (шток в сальнике); сферическая трехподвижная (плечевой сустав).
1.3.3 Виды механизмов и их структурные схемыРазличают механизмы с низшими и высшими кинематическими парами, плоские и пространственные. Наиболее распространенные механизмы с высшими парами - кулачковые, зубчатые, фрикционные, мальтийские и храповые; с низшими - рычажные, клиновые и винтовые.
1.3.4 Структурный анализ и синтез механизмов. Влияние избыточных связей на работоспособность и надежность машин
Важнейшей задачей структурного анализа при конструировании машин является выявление и устранение избыточных связей в кинематических цепях механизма или сведение их к минимуму. Механизм с избыточными связями нельзя собрать без деформирования звеньев при существенных допусках на размеры этих звеньев.
Поэтому такие механизмы требуют повышенной точности изготовления. При недостаточной точности изготовления механизма с избыточными связями трение в кинематических парах может сильно увеличиваться и привести к заклиниванию звеньев. С этой точки зрения избыточные связи в механизмах нежелательны. Однако в ряде случаев приходится сознательно проектировать статически неопределимые механизмы с избыточными связями.
Выше в качестве примера показан коленчатый вал четырехцилиндрового двигателя внутреннего сгорания. Он образует с подшипником А одноподвижную вращательную пару, что вполне достаточно с точки зрения кинематики данного механизма с одной степенью свободы (W = 1). Однако, учитывая большую длину вала и значительные силы, нагружающие его, приходится добавлять подшипники А¢ и А², иначе система будет неработоспособной из-за недостаточной прочности и жесткости. Если эти вращательные пары двухподвижные цилиндрические, то помимо 5и основных связей будет наложено ![]() добавочных связей; при этом потребуется высокая точность изготовления (расточка отверстий стойки и проточка шеек вала с одного установа) для обеспечения соосности всех трех опор, иначе вал будет сильно деформироваться, что приведет к недопустимо большим напряжениям.
добавочных связей; при этом потребуется высокая точность изготовления (расточка отверстий стойки и проточка шеек вала с одного установа) для обеспечения соосности всех трех опор, иначе вал будет сильно деформироваться, что приведет к недопустимо большим напряжениям.
В общем случае оптимальное решение следует искать, учитывая наличие необходимого технологического оборудования, стоимость изготовления, требуемый ресурс работы и надежность машины. Мы ограничимся здесь этим примером.
Чтобы конструкции кинематической пары были работоспособными и надежными в эксплуатации, предъявляют определенные требования к размерам, форме и относительному положению ее элементов. Это выражается в указании пределов отклонений от номинальных размеров и формы.
При разработке конструкций дополнительные элементы кинематических пар вводят для того, чтобы уменьшить давление и износ контактируемых поверхностей за счет перераспределения реактивных сил.
Особое внимание уделяется уменьшению деформаций под действием заданных сил путем установки дополнительных подшипников.
Схему кинематической пары, отражающей только необходимое число геометрических связей, соответствующее виду пары, называют основной (а).
Схему кинематической пары, отражающей как необходимые, так и избыточные локальные (дополнительные) связи, называют действительной (б). Дополнительные связи вносят статическую неопределенность. Число дополнительных связей в реальной конструкции пары называют степенью статической неопределимости кинематической пары.
Негативное влияние дополнительной опоры можно компенсировать, например, установкой сферических подшипников, допускающих некоторый перекос оси, и т.д.
Применение конструкций с дополнительными связями между элементами кинематической пары возможно при достаточной жесткости звеньев и особенно стойки (корпуса, станины, рамы). Деформация звеньев при воздействии нагрузок не должна приводить к заклиниванию элементов кинематических пар или их повышенному изнашиванию. Механизмы, которые удовлетворяют требованиям приспособляемости к деформации звеньев, надежности, долговечности и технологичности конструкции, обладают оптимальной структурой.
1.3.5 Кинематические характеристики механизмовОсновным назначением механизма является выполнение необходимых движений, которые описываются посредством его кинематических характеристик. К ним относятся траектория точек, координаты точек и звеньев механизма и прежде всего его обобщенные координаты, перемещения точек и звеньев, их скорости и ускорения. К числу кинематических характеристик относятся и такие, которые не зависят от закона движения начальных звеньев, а определяются только строением механизма, размерами его звеньев и в общем случае зависят от обобщенных координат.
Это функции положения, аналоги скоростей или передаточные функции, аналоги ускорений точек и звеньев механизма.
По кинематическим характеристикам конструктор делает вывод о том, насколько успешно выполнен выбор структурной схемы и определение размеров звеньев. Следовательно, для создания механизма наилучшим образом отвечающего поставленным требованиям, надо знать методы определения кинематических характеристик механизма. Это достаточно сложные математические задачи, которые мы рассматривать не будем. Отметим лишь, что широкое распространение получили графические методы кинематического исследования механизмов, позволяющие определить положения звеньев, скорости и ускорения точек и звеньев. Графические методы включают в себя построение планов механизма, планов скоростей и ускорений.
Планы механизма.
Изображение кинематической схемы механизма в выбранном масштабе, соответствующее положению начального звена называется планом механизма. При этом входное звено вычерчивается в ряде положений и для этих положений входного звена указываются положения остальных звеньев.
На плане механизма в случае необходимости можно построить траектории, описываемые любой точкой того или иного звена, положение которого уже найдено.
Планы скоростей и ускорений.
Планом скоростей механизма называют чертеж, на котором изображены в виде отрезков векторы, равные по модулю и по направлению скоростям различных точек звеньев механизма в данный момент. План скоростей для механизма является совокупностью нескольких планов скоростей для отдельных звеньев, у которых полюса планов Р являются общей точкой - полюсом плана скоростей механизма.
Чертеж, на котором изображены в виде отрезков векторы, равные по модулю и направлению ускорениям различных точек звеньев механизма в данный момент, называют планом ускорений механизма. Для того, чтобы был понятен смысл записанных определений, рассмотрим в качестве иллюстрации планы скоростей и ускорений начального звена механизма - наиболее простой случай, поскольку начальное звено обычно совершает простое движение: вращательное (кривошип) или поступательное (поршень).
Имеется начальное звено механизма АВ, вращающееся со скоростью w1 относительно оси А. Берем момент, когда АВ заняло положение с обобщенной координатой j1 относительно оси х. Скорость точки В перпендикулярна прямой АВ и соответствует (в масштабе) vB. Аналогично для точек С и D, в которых мы хотим узнать скорость, на лежащих на АВ. Для того, чтобы получить план скоростей, нужно векторы скоростей ![]() ,
, ![]() ,
, ![]() перенести в общий полюс Р. При этом будет соблюдаться подобие треугольников: D BCD ~ D bcd. Они будут повернуты друг относительно друга на 90° в направлении w1. Следовательно, зная скорость точки В, пользуясь подобием треугольников, построенных на плане скоростей, можно графически найти скорость точек, не лежащих на АВ.
перенести в общий полюс Р. При этом будет соблюдаться подобие треугольников: D BCD ~ D bcd. Они будут повернуты друг относительно друга на 90° в направлении w1. Следовательно, зная скорость точки В, пользуясь подобием треугольников, построенных на плане скоростей, можно графически найти скорость точек, не лежащих на АВ.
Для сложных случаев, определения кинематических характеристик звеньев аналитическим путем сегодня широко применяется ЭВМ.
1.3.6. Силы, действующие в механизмах и способы их определенияСилы и пары сил (моменты), приложенные к механизму машины, можно разделить на следующие группы. Движущие силы и моменты, совершающие положительную работу за время своего действия или за один цикл, если они изменяются периодически. Эти силы и моменты приложены к звеньям механизма, которые называются ведущими.
Силы и моменты сопротивления, совершающие отрицательную работу за время своего действия или один цикл. Эти силы и моменты делятся, во-первых, на силы и моменты полезного сопротивления, которые совершают требуемую от машины работу и приложены к ведомым звеньям, и, во-вторых, на силы и моменты сопротивления среды (газа, жидкости), в которой движутся звенья механизма. Силы сопротивления среды обычно малы по сравнению с другими силами и в ТММ не учитываются (на практике часто их учет необходим).
Силы тяжести подвижных звеньев и силы упругости пружин. На отдельных участках движения механизма эти силы могут совершать как положительную, так и отрицательную работу. Однако за полный кинематический цикл работа этих сил равна нулю, т.к точки их приложения движутся циклически.
Силы и моменты, приложенные к корпусу машины (к стойке) извне. К ним помимо силы тяжести корпуса относятся реакция основания (фундамента) машины на ее корпус и многие другие силы (ветер и т.д.). Все эти силы и моменты, поскольку они приложены к неподвижному звену, работы не совершают.
Силы взаимодействия между звеньями механизма, т.е. силы, действующие в его кинематических парах. Эти силы согласно 3му закону Ньютона всегда взаимообратны. Их нормальные составляющие работы не совершают, а касательные составляющие, т.е. силы трения совершают отрицательную работу.
Силы и моменты первых трех групп относятся к категории активных. Обычно они известны или могут быть оценены. Все эти силы и моменты приложены извне и поэтому являются внешними. К числу внешних относятся силы и моменты 4ой группы, но не все они являются активными.
Силы 5ой группы для механизма в целом являются внутренними. Эти силы являются реакциями на действие активных сил.
Наибольшее влияние на закон движения механизма оказывают движущие силы и моменты, а также силы и моменты сопротивления. Их физическая природа, величина и характер действия определяются рабочим процессом машины, в которой использован данный механизм. В большинстве случаев эти силы и моменты не остаются постоянными, а изменяют свою величину при изменении положения звеньев механизма или их скорости. Эти функциональные зависимости, представленные графически, массивом чисел или аналитически, называются механическими характеристиками и при решении задач считаются известными.
Пример: зависимость М от скорости - маховик.
Пример: зависимости силы от перемещения - давление на дно поршня в ДВС - чем ниже поршень, тем меньше давление газа в цилиндре, т.к по мере движения поршня газ расширяется.
Таким образом, расчет механизма требует увязки действующих сил и параметров движения механизма, что в целом приводит к созданию динамической модели машинного агрегата. Такой анализ является сложной задачей ТММ.
Достаточное знакомство с кинематикой, статикой, динамикой точки, т ела, а затем механизма, знакомство с общими представлениями о прочности и жесткости позволяет перейти от абстрактных схем к конкретным машиностроительным конструкциям, изучаемым в курсе "Детали машин".
1.3.7. Типовые детали машинЛюбая машина, любой механизм состоят из деталей. Деталь является такой частью машины, которую изготовляют без сборочных операций. Детали могут быть простыми (гайка, шайба, шпонка) или сложными (коленчатый вал, корпус редуктора, станина). Детали (частично или полностью) объединяют в узлы. Узел представляет собой законченную сборочную единицу, состоящую из ряда деталей, объединяемых общим функциональным назначением узла (подшипник, муфта, редуктор). Сложные узлы могут включать несколько простых узлов (подузлов). Например, редуктор включает валы с насажанными зубчатыми колесами.
Среди большого разнообразия деталей и узлов машин можно выделить такие, которые встречаются почти во всех машинах (болты, валы, муфты и т.д.). Эти детали и узлы называются деталями (узлами) общего назначения. Они и являются предметом изучения в курсе Деталей машин.
Поскольку в курсе технологии машиностроения предстоит изучать технологию изготовления типовых деталей, то остановимся на определении некоторых из них.
1.3.7.1. Валы и осиДеталь, на которую насажены вращающиеся чести машины, реально осуществляющая геометрическую ось вращения этих частей, называется осью или валом.
Ось предназначена лишь для поддержания вращающихся деталей. Оси могут быть неподвижными относительно машины, либо вращаться вместе с насаженными на них деталями. В любом случае ось воспринимает лишь изгибающие нагрузки от усилий, действующих на вращающиеся части машин.
Вал, в отличие от оси, не только поддерживает вращающиеся детали, но и передает крутящий момент. Вследствие этого валы оказываются нагруженными не только изгибающими усилиями, но и крутящим моментом.
Крутящий момент связан с передаваемой мощностью и числом оборотов вала соотношением
![]() , [Н × м],
, [Н × м],
где N - мощность, кВт;
n - число оборотов вала, об/мин.
По форме геометрической оси вала различают: прямые валы и коленчатые валы. Коленчатые валы обычно считают не типовой, а специальной конструкцией. Прямые валы могут быть гладкими, если имеют постоянный диаметр по всей длине, или ступенчатыми.
Особую группу составляют валы с изменяющейся формой геометрической оси - гибкие валы.
Опорные участки осей и валов называются цапфами. В зависимости от системы нагружения, направление опорных реакций может быть радиальным и осевым.
Цапфы, воспринимающие опорные реакции радиального направления, называются шипами, если они являются концевыми, или шейками, если они расположены на удалении от конца вала.
Цапфы, воспринимающие осевые опорные реакции, называются пятами. Одна и та же конструктивная задача может быть решена как с помощью вала, так и оси.
а - барабан насажен на неподвижную ось, зубчатое колесо для приведения вала во вращение закреплено на барабане; б - барабан закреплен на вращающейся оси; в - барабан закреплен на валу, зубчатое колесо тоже, вращающий момент с зубчатого колеса на барабан передается валом.
В случае "а" ось испытывает односторонний изгиб, в случае "б" нагрузка на ось - знакопеременная, поэтому диаметр оси должен быть больше. Но зато в варианте "б" легче доступ к подшипникам. Достоинством варианта "в" является свободный доступ к узлам трения, насадка зубчатого колеса на вал, а не на барабан упрощает конструкцию.
Диаметры посадочных мест осей и валов выбираются стандартные, что обеспечивает возможность использования стандартного измерительного инструмента и стандартных подшипников. Свободные размеры выбираются из ряда предпочтительных чисел.
Переход на ступенчатом валу с одного диаметра на другой осуществляется не резко, а с помощью галтели с целью уменьшения усталостных напряжений, возникающих при знакопеременной нагрузке.
Существенное снижение массы вала или оси при незначительном уменьшении момента сопротивления может быть достигнуто при использовании полого вала. Оси и валы - ответственные детали, обязательно подлежащие расчету на прочность. Ось считают на изгиб. Вал, помимо изгиба, проверяют на критическое число оборотов. В некоторых случаях помимо прочности требуется проверка вала на жесткость.
Поскольку валы и оси являются достаточно нагруженными элементами конструкции, для их изготовления используют материалы повышенной прочности. Так, если машина изготовлена из черных металлов, вал или ось изготавливают из стали 45, в нержавеющих стальных конструкциях - из 3Х13 и т.д. Следует заметить, что указанные марки сталей способны подвергаться закалке и другим методам термообработки.
Особую конструкцию представляют собою гибкие валы, применяемые для передачи движения между деталями, если в процессе работы изменяются относительное расположение их осей вращения. Пример: использование вибратора в бетонных работах.
Распространенной конструкцией является гибкий вал, состоящий из ряда последовательно навитых друг на друга слоев стальной проволоки. Первый от центра слой навивается на центральную проволоку - сердечник, который может быть затем извлечен из вала, либо оставлен внутри его. Конструктивно гибкий вал похож на многозаходную, многослойную винтовую пружину кручения с плотно прилегающими друг к другу витками и слоями. Смежные слои имеют противоположные направления навивки. Направление вращения вала должно быть таким, чтобы пружина, образующая внешний слой, закручивалась, а не раскручивалась.
1.3.7.2. Опоры скольженияНазначение опор - направлять движение обслуживаемых ими осей и валов и воспринимать действующие на эти детали усилия.
В зависимости от рода трения между поверхностями опоры делятся на опоры трения скольжения и трения качения.
Опоры, нагружаемые через шейку или шип вала, называются подшипниками, опоры, нагружаемые осевыми силами через пяту, называются подпятниками.
Качество работы подшипников скольжения в значительной мере определяется условиями трения скольжения. Различают трение скольжения сухое, полусухое, граничное и жидкостное. Сухое трение имеет место между двумя идеально чистыми поверхностями, при отсутствии какого-либо вещества между ними. Коэффициент трения при этом максимален. Такие условия можно получить только в лабораторных условиях. В реальных условиях между поверхностями всегда есть тоните пленки газа, влаги и жира. Трение в присутствии таких пленок называется полусухим. Хотя толщина пленки составляет всего несколько ангстрем, она заметно снижает коэффициент трения.
Граничное трение происходит в присутствии искусственно введенной прослойки смазочного вещества толщиной 0,1 - 0,5 мкм. Коэффициент трения при этом еще меньше.
По мере увеличения толщины масляного слоя уменьшается степень влияния твердой поверхности на молекулы масла. Один слой масла начинает скользить по другому и сопротивление начинает определяться вязкостью масла. Такое трение называется жидкостным и является наиболее желательным, поскольку полностью исключает непосредственное соприкосновение опорных поверхностей. Но для его осуществления необходимо создать условия, предотвращающие выдавливание смазки из зазора между поверхностями.
Подшипники и подпятники скольжения изготавливаются из антифрикционных материалов: чугуна, бронзы, баббита (сплав из олова, свинца, сурьмы и др.). Хорошим антифрикционным материалом является фторопласт, но из-за низкой теплопроводности его приходится наносить на основу из пористой бронзы. Удобны графитовые подшипники, поскольку они обладают свойством самосмазывания и не нуждаются в смазочном масле. В текстильном оборудовании широко применяются подшипники из прессованной древесины, поскольку жировая смазка может оставить пятна на ткани при случайном попадании, а деревянные подшипники работают на водяной смазке.
Конструктивно узел подшипника представляет собой стальной или чугунный корпус - сплошной или с отъемной крышкой, внутри которого находится вкладыш из антифрикционного материала. Предусматриваются отверстия и канавки для подачи масла в зазор между вкладышем и цапфой вала.
Одним из методов подачи масла является установка на корпусе пресс-масленки или штауфера.
1.3.7.3. Опоры качения
Опора качения состоит из корпуса, похожего на корпус опоры скольжения, в который вместо кольцевого вкладыша из антифрикционного материала вставлен подшипник качения.
По характеру воспринимаемой нагрузки подшипники качения подразделяются на радиальные, радиально-упорные, упорные.
Радиальные подшипники воспринимают от вала нагрузку, перпендикулярную оси вращения. Осевая нагрузка может носить случайный характер и по величине не должна превышать 10% от радиальной.
Упорный подшипник воспринимает только нагрузку, действующую вдоль оси вращения. Радиально-упорный подшипник воспринимает и ту, и другую нагрузки.
По виду тела качения подшипники делятся на шариковые, роликовые и игольчатые, при этом шарикоподшипники могут быть одно - и двухрядные.
Принцип устройства рассмотрим на примере самого простого однорядного радиального шарикоподшипника. Он состоит из следующих элементов: внутреннее кольцо, которое насаживается на цапфу вала; наружное кольцо, которое запрессовывается в корпус подшипника; шарики - тела качения, которые воспринимают нагрузку и обеспечивают трение качения при вращении внутреннего кольца относительно наружного; сепаратор, который обеспечивает равномерное распределение шариков в зазоре между наружным и внутренним кольцами.
1.3.7.4. Пружины и рессорыПружины и рессоры выполняют в машинах роль упругих элементов. Воспринимая работу внешних сил, они преобразуют ее в работу упругой деформации материала, из которого они изготовлены.
Пружины выполняют в машинах следующие функции:
Силовой элемент, обеспечивающий действие определенных усилий на заданном участке. Пример: пружина предохранительного клапана.
Амортизатор. Воспринимая мгновенную энергию удара, такая пружина возвращает ее в виде энергии упругих колебаний.
Движитель механизма. Это заводные пружины часов, приборов, игрушечных автомобилей и пр.
Различают следующие основные типы пружин: винтовые, спиральные, тарельчатые, кольцевые. Кроме того, существуют разнообразные пружины специального назначения, например, пружина Бурдона в манометрах.
Винтовые пружины получаются навивкой проволоки на оправку требуемой формы. По виду нагружения различают винтовые пружины растяжения, воспринимающие продольную осевую нагрузку, которая растягивает пружину; пружины сжатия, воспринимающие продольную осевую нагрузку, которая сжимает пружину; пружины кручения, на которые нагрузка передается в виде крутящего момента относительно оси пружины.
По форме винтовые пружины могут быть цилиндрические; фасонные (конические, бочкообразные и др.); специальных форм (например, призматические).
По форме поперечного сечения витка пружины могут быть с витками круглого сечения или прямоугольного сечения.
Материалом для пружин могут служить высокоуглеродистые стали (65), марганцовистые (65Г), кремнистые (60С2). Для агрессивных сред применяют бронзовые пружины. Индекс пружин, т.е. ![]() .
.
Пружины сжатия навиваются так называемой открытой навивкой, обеспечивающей определенный зазор между витками. Пружины растяжения имеют открытый зазор между витками. Пружины растяжения имеют закрытые витки, плотно прилегающие друг к другу.
Фасонные пружины чаще всего используются в качестве пружин сжатия. Основная особенность этих пружин - различные диаметры навивки соседних витков. Это вызывает и различную их деформацию - ведь чем больше диаметр витка при одном диаметре проволоки, из которой навита пружина, тем меньше его жесткость.
При некотором значении сжимающего усилия Р виток с наибольшим диаметром оказывается поджатым своей торцевой поверхностью к поверхности опоры и выключается из работы. Затем включается следующий по диаметру виток и т.д. Следовательно, по мере возрастания нагрузки меняется число работающих витков и диаметр пружины. Это обстоятельство позволяет подобрать профиль пружины, обеспечивающий любую заданную закономерность изменения характеристики пружины.
Пружины качения воспринимают нагрузку в виде крутящего момента. Затрачиваемая работа преобразуется в работу упругого поворота витков относительно продольной оси пружины.
Спиральные пружины (например, в часах) нагружаются крутящим моментом. В процессе работы пружина, постепенно разворачиваясь, сообщает вращение барабану (валику), с которым скреплен ее конец.
![]()
Тарельчатые пружины состоят из набора дисков, имеющих форму усеченных конусов. Стандарт предусматривает такие пружины диаметром от 28 до 300 мм.
Расчет их сложен. Поэтому при подборе их пользуются таблицами, приведенными в ГОСТе 3057-90. Величина деформации пружины зависит от числа взятых конических элементов.
Кольцевые пружины (клинчатые) состоят из набора колец специального профиля. При нагружении крайних колец по периметру наружные кольца надвигаются на внутренние, в результате чего первые растягиваются, а вторые растягиваются. При этом уменьшается общая высота пружины. После того, как внешняя нагрузка удалена, внутренние силы упругости вновь раздвигают кольца.
Рессоры применяются главным образом в амортизационных устройствах транспортных машин, а также в некоторых конструкциях кузнечного оборудования.
Рессора представляет собой набранную из стальных полос балку равного сопротивления изгибу. С целью уменьшения напряжений листам придают изогнутую форму.
1.3.7.5. Предохранители от перегрузкиВ машинах предохранителями от перегрузки называют детали и механизмы, контролирующие усилие или крутящий момент с тем, чтобы при достижении этим параметром определенного, заранее установленного, значения, предотвратить возможность его дальнейшего возрастания.
Конструкции предохранителей можно классифицировать следующим образом:
Ломающиеся предохранители: со срезным штифтом; со срезной пластиной; с разрывным болтом; с продавливаемой чашкой и т.д.;
Фрикционные предохранители: дисковые, конусные и т.д.;
Пружинные предохранители: пружинные; пружинно-зубчатые; кулачковые; штифтовые; шариковые; роликовые; рычажные и др. .
По способу восстановления разомкнутой силовой цепи предохранители могут быть с автоматическим повторным включением; с ручным возвратом; с восстановлением путем замены разрушенного элемента.
1.3.7.6. Станины, плиты, коробки и другие корпусные деталиНазванные детали и узлы обычно объединяют общим названием корпусные детали. Эти детали составляют значительную часть массы машины, например, в станках 70-90%. Отсюда понятно, что борьба за снижение массы машины в значительной мере определяется тем, насколько удачно конструктор выбрал материал, форму и размеры именно этих деталей.
Позднее мы будем говорить о так называемом идеальном техническом решении, тогда придется вернуться к этой мысли.
К неподвижным корпусным деталям, помимо вынесенных в заголовок, относятся также основания, фундаментные плиты, колонны, стойки, кронштейны, кожухи, крышки. Есть и подвижные корпусные детали: столы, суппорты, ползуны и т.д.
Для большинства корпусных деталей характерна работа в условиях сложного напряженного состояния. Расчет усложняется тем, что часто требуется сложная форма детали, наличие окон, полостей. Например, станина токарного станка должна быть не только несущей конструкцией, но она должна обеспечить свободное падение и уборку стружки. В других случаях наличие проемов в стенках диктуется необходимостью разместить внутри корпусных деталей различные механизмы и агрегаты. Для увеличения жесткости конструкций в корпусных деталях широко применяются перегородки и ребра. Все это затрудняет точный расчет корпусных деталей. Для ряда из них существуют приближенные расчетные схемы, в основном, следующих четырех вариантов:
а) детали, как брусья коробчатого сечения;
б) детали, рассматриваемые как рамы;
в) детали, рассматриваемые как пластины;
г) детали, рассматриваемые как коробки (например, корпуса редукторов).
Очень часто, учитывая коробчатый и рамный характер конструкций, что обеспечивает высокую прочность на изгиб, толщину стенок выбирают минимально допустимой, исходя из технологических соображений, в частности, исходя из возможности отливки литых деталей.
Чрезвычайно широкое применение во всех машинах и аппаратах имеют стандартные крепежные детали: болты, винты, гайки, шайбы, шпильки, штифты, шплинты, а также шпонки.
Ограничимся здесь кратким определением этих терминов, приводимым в энциклопедических справочниках.
Болт - крепежная деталь, обычно стержень с шестигранной или квадратной головкой и внешней резьбой для навинчивания гайки.
Винт - крепежная деталь в виде стержня с головкой, имеющей шлиц под отвертку, и внешней резьбой.
Гайка - деталь с внутренней резьбой, образующая с болтом или винтом болтовое соединение, винтовую пару.
Шайба - диск с отверстием. Подкладывается обычно под гайку, головку болта для увеличения опорной поверхности, защиты поверхности детали от задиров при затягивании гайки, для предотвращения самоотвинчивания гайки (пружинная шайба).
Шпилька - крепежная деталь, стержень с резьбой на обоих концах, один из которых ввертывается в основную деталь, а другой пропускается через отверстие в закрепляемой детали и на него навинчивается гайка. В других случаях детали скрепляются шпилькой, на оба конца которой навинчиваются гайки.
Штифт - цилиндрический или конический стержень для неподвижного соединения деталей или для фиксации их при сборке.
Шплинт - круглый сложенный пополам стержень для соединения слабонагруженных деталей, а также для предотвращения самоотвинчивания гаек. Шплинт вставляют в отверстие, а затем выступающие концы отгибают в стороны.
Шпонка - деталь призматической, клинообразной или другой формы, устанавливаемая в пазах двух соприкасающихся деталей и предотвращающая их относительный поворот или сдвиг.
1.3.8. Соединения деталей машинСвязи между деталями в машине могут быть подвижными (шарнир) и неподвижными - резьбовые, сварные, шпоночные и т.д. Неподвижные связи называют соединениями. Различают соединения разъемные (резьбовые, штифтовые, клиновые, шпоночные, шлицевые) и неразъемные - сварные, клеевые, заклепочные, прессовые.
1.3.8.1. Резьбовые соединенияРезьбы могут быть цилиндрические и конические в зависимости от того, на какой поверхности они нарезаны. По профилю резьбы их разделяют на треугольные, прямоугольные, трапецеидальные, круглые. По направлению винтовой линии различают правую и левую резьбы.
Резьба может быть одно - и многозаходной. Все крепежные резьбы - однозаходные.
Резьбы характеризуются следующими геометрическими параметрами:
d - наружный диаметр резьбы;
d1 - внутренний диаметр резьбы;
d2 - средний диаметр резьбы (там, где ширина выступа равна ширине впадины);
h - рабочая высота профиля, по которой соприкасаются витки болта и гайки;
s - шаг резьбы.
Основные типы крепежный резьбовых деталей: болты (с гайкой), винты, шпильки. Основным преимуществом болтового соединения является отсутствие необходимости нарезания резьбы в соединяемых деталях.
В конструкциях машин необходимо предохранять гайки от самоотворачивания, вследствие вибрации и т.д. Это делают следующими способами: с помощью контргайки, пружинной шайбы; применением натяга в резьбе; жестким соединением гайки с болтом посредством шплинта или проволоки; шайбой, отогнутой на грань гайки или прихваткой сваркой.
Болты, винты, шпильки, гайки, шайбы стандартизованы. Условия прочности резьбы:
по напряжениям смятия
 ,
,
где z - число витков резьбы в гайке (![]() );
);
Р - сила, действующая на резьбу (растягивающая болт);
по напряжениям среза
 - для болта;
- для болта;
![]() - для гайки.
- для гайки.
Для треугольной резьбы К = 0,8; для прямоугольной - К = 0,5. Тело болта считают на растяжение ![]() . Иногда болт стоит в отверстии детали без зазора (призонный болт). Тогда он проверяется на срез
. Иногда болт стоит в отверстии детали без зазора (призонный болт). Тогда он проверяется на срез
 ,
,
где i - число плоскостей среза.
Определение необходимой силы затяга болтов Р зависит от условий работы соединения, в котором установлены болты (zв, фланцевое соединение корпуса и крышки аппарата).
1.3.8.2. Заклепочные соединенияНекогда широко распространенный вид неразъемного соединения сегодня почти полностью вытеснен сваркой. Применяется в медной аппаратуре, судостроении, мостостроении, в рамах автотранспорта.
Заклепочные соединения подразделяются на прочные (в металлоконструкциях), прочноплотные (в резервуарах высокого давления), плотные (в резервуарах с небольшим давлением). Заклепки считают на срез.
1.3.8.3. Сварные соединения
Сегодня это самый распространенный вид неразъемного соединения. Существуют десятки разновидностей сварки. Более подробно о них будет идти речь в курсе основ технологии. Здесь ограничимся упоминанием о некоторых наиболее важных видах сварки.
Электродуговая сварка основана на использовании тепла электрической дуги для расплавления металла соединяемых деталей. Чтобы при этом предохранить металл в ванне от окисления, применяют специальную обмазку электродов, либо ведут сварку под слоем флюса, либо в среде защитных газов.
При электрошлаковой сварке источником нагрева служит тепло, выделяющееся при прохождении тока через шлаковую ванну от электрода к изделию. Эта сварка предназначена для соединения деталей большой толщины.
Контактная сварка основана на использовании повышенного омического сопротивления в стыке деталей. По методу осуществления может быть точечной, роликовой.
В последнее время распространяется плазменная сварка. Для соединения миниатюрных ответственных элементов используют лазерную сварку, а также сварку электронным лучом в вакууме.
При расчете сварных конструкций используют зависимости, изученные в сопромате, но вводятся коэффициенты ослабления сварного шва, величина которых зависит от способа осуществления сварки.
1.3.8.4. Соединения пайкой и склеиваниемПайка - метод неразъемного соединения деталей, при котором плавится только припой, а металл соединяемых деталей остается твердым. Пайка широко применяется в медной аппаратуре, в радиоаппаратуре. Применяют твердые и мягкие припои.
Склеивание применяется в машиностроении, в авиации (стабилизатор). Конструктивно паянные и клееные соединения выполняются примерно одинаково - внахлестку.
1.3.8.5. Клеммовые соединения
Клеммовые соединения применяют для закрепления деталей на валах и осях, цилиндрических колоннах, кронштейнах и т.д.
По конструкции различают два типа клеммовых соединений: со ступицей, имеющей прорезь и с разъемной ступицей. При соединении деталей с помощью клемм используют силы трения, которые возникают от затяжек болтов.
1.3.8.6. Шпоночные, зубчатые (шлицевые) и профильные соединения
Шпонки служат для закрепления деталей на валах с передачей крутящего момента. Клиновые шпонки посажены с зазором по боковым граням и передает Мкр за счет сил трения вследствие запрессовки шпонки.
Призматические шпонки посажены плотно по боковым граням и работают на срез и смятие. Сегментная шпонка является разновидностью призматической и работает так же.
Если нужно передать большой крутящий момент и при этом не отжимать вал в сторону от центральной оси соединения, применяют шлицевое соединение. Разумеется, нагрузка не распределяется равномерно по всем шлицам. Поэтому на смятие (основной расчет) соединение считают по формуле:
 ,
,
где К » 0,7 ¸ 0,8 - коэффициент, учитывающий неравномерность распределения усилий между зубьями;
z - число зубьев;
h - высота поверхности контакта зубьев;
l - рабочая длина зубьев;
rср - средний радиус поверхности контакта;
Т - момент.
В отличие от шпонок шлицы могут иметь не только прямоугольный профиль, но также эвольвентный или треугольный.
Профильное (бесшпоночное) соединение.

Профильным соединением называется такое, у которого втулка сажается не на круглую поверхность вала. Такие соединения рассчитывают приближенно по напряжениям смятия, возникающим на рабочих гранях.
1.3.8.7. Соединения деталей посредством посадок с гарантированным натягом (прессовые соединения)Натягом d называют отрицательную разность диаметров отверстия и вала. После сборки вследствие упругих и пластических деформаций диаметр посадочных поверхностей отверстия и вала становится одинаковым. При этом на поверхностях посадки возникает удельное давление Р и соответствующие им силы трения.
Нагрузочная способность прессового соединения, прежде всего, зависит от величины натяга. Эта величина регламентируется стандартом допусков и посадок. Более подробно о нем будет речь в Основах технологии. Сборку соединения с натягом выполняют прессованием, нагревом втулки или охлаждением вала. Условия прочности соединения при нагружении осевой силой S:
![]() ,
,
где р - давление на поверхности контакта;
d, l - соответственно диаметр и длина шейки вала, на которую насажена втулка;
f - коэффициент трения скольжения.
Условия прочности при нагружении крутящим моментом:
![]() .
.
При этом Р нужно находить из уравнения совместности деформаций
 ,
,
где dр - расчетный натяг;
 ;
;  ,
,
где Е1, Е2 - модули упругости материалов вала и втулки;
m1, m2 - коэффициенты Пуассона материалов вала и втулки.
Разновидность соединения - соединение посадкой на конус с затяжкой гайкой.
1.3.9. Механические передачиМеханической передачей называют механизм, который преобразует параметры движения двигателя при передаче рабочим органам машины.
Основные характеристики передач:
мощность N1 на входе и N2 на выходе;
быстроходность (частота вращения);
коэффициент полезного действия;
передаточное отношение.
1.3.9.1. Ременные передачи
Передача состоит из двух шкивов и ремня. Нагрузка передается силами трения, возникающими между шкивами и ремнем.
Преимущества: передача движения на довольно значительное расстояние, плавность и бесшумность работы, предохранение механизмов от резких колебаний нагрузки вследствие упругости ремня, от перегрузки вследствие его проскальзывания, простота конструкции и обслуживания.
Недостатки: довольно крупные габариты, проскальзывание ремня.
Основные критерии работоспособности: тяговая способность, определяемая силой трения между ремнем и шкивом; долговечность ремня.
Расчет ременной передачи заключается в определении размеров шкивов, обеспечивающих заданное передаточное отношение, размеров ремня, сил и напряжений в ведущей и ведомой ветвях ремня.
При расчете КПД принимают для плоскоременных передач h = 0,97, для клиноременных - h = 0,96.
В передачах применяют следующие типы плоских ремней: кожаные (дорогие), прорезиненные, хлопчатобумажные (менее долговечные), шерстяные (лучше переносят резкие колебания нагрузки), пленочные из пластмасс (прочные, быстроходные).
1.3.9.2. Фрикционные передачиРабота фрикционной передачи основана на использовании сил трения, которые возникают в месте контакта двух тел вращения под действием сжимающих сил Q.
Существуют фрикционные передачи с регулируемым и нерегулируемым передаточным отношением, с нерегулируемым - редко.
Фрикционные вариаторы применяют как в кинематических, так и в силовых передачах в тех случаях, когда требуется бесступенчатое регулирование скорости.
Описываемые передачи могут быть нескольких типов:
фрикционная передача с гладкими коническими валками
фрикционная передача с гладкими цилиндрическими валками
лобовой вариатор
вариатор с раздвижными конусами
торовый вариатор
дисковый вариатор
Здесь момент передается за счет трения между набором ведущих и ведомых дисков. Решающее значение для вариаторов имеет проблема скольжения. Различают три вида скольжения.
Буксование наступает при перегрузках. При буксовании ведомый каток останавливается, а ведущий скользит по нему, вызывая местный износ и задир поверхности.
Упругое скольжение связано с упругими деформациями в зоне контакта. Равенство окружных скоростей наблюдается только в точках на линии контакта. А из-за сплющивания упругого тела контакт идет не по линии, а по площади. В остальных точках, кроме указанных, идет скольжение.
Геометрическое скольжение связано с неравенством скоростей на площадке контакта у ведущего и ведомого катков.
1.3.9.3. Зубчатые передачиЭто самый распространенный тип передач. По расположению осей валов различают: передачи с параллельными осями и с цилиндрическими зубчатыми колесами внешнего и внутреннего зацепления; передачи с пересекающимися осями с коническими колесами; передачи с перекрещивающимися осями - конические гипоидные, червячные. По расположению зубьев на колесах различают: прямозубые, косозубые, включая шевронные, и с круговым зубом.
Основные преимущества:
высокая нагрузочная способность и, следовательно, малые габариты;
большая долговечность и надежность работы;
высокий КПД;
постоянство передаточного отношения;
возможность применения в широком диапазоне скоростей, мощностей, передаточных отношений.
Недостатки: повышенные требования к точности изготовления, шум при больших скоростях, высокая жесткость, не позволяющая компенсировать динамические нагрузки.
Расчет на прочность прямозубых и косозубых цилиндрических передач стандартизован (ГОСТ 21354-75). Мы не будем его здесь рассматривать. Некоторые данные см [2, с.183-191]. Расчет конических зубчатых передач [2, с. 191-198].
Особенности планетарных передач.
Планетарными называют передачи, включающие в себя зубчатые колеса с перемещающимися осями.
Достоинства планетарных передач:
широкие кинематические возможности, благодаря чему передачу можно использовать как редуктор с постоянным передаточным отношением, как коробку скоростей с i, изменяемым за счет торможения различных звеньев, как дифференциальный механизм;
компактность и малая масса;
получение больших i в одной ступени;
малая нагрузка на опоры, т.к симметрично расположенные сателлиты уравновешивают силы.
Недостаток - повышенные требования к точности изготовления и монтажа.
Передаточное отношение
 .
.
Передачи с зацеплением Новикова
Наиболее распространенный вид зацепления в зубчатых передачах - эвольвентное, обеспечивающее контакт между зубьями по линии. В 1954 г. М.Л. Новиков предложил зубчатое зацепление с круговыми профилями зубьев. Здесь контакт по поверхности. Следовательно, резко снижается удельное давление на зуб при том же крутящем моменте.
Эти передачи сейчас стандартизованы. Распространение сдерживается дефицитом специального режущего инструмента, связанным со сложностью исходного контура инструмента (ГОСТ 14186-69). Другим недостатком зацепления является повышенная чувствительность к изменению межосевого расстояния.
Волновые механические передачи
Волновая передача основана на преобразовании параметров движения за счет волнового деформирования одного из звеньев механизма. Принцип запатентовал в 1944 г. Московитин для фрикционной передачи и в 1959 г. Массером (США) для зубчатой передачи с механическим генератором. Принцип ясен из рисунка, где F - гибкое колесо, С - жесткое колесо, Н - волновой генератор.
Жесткое колесо имеет внутренние, а гибкое (пластмассовое) наружные зубья. Гибкое колесо деформируют так, что в точках В между вершинами зубьев образуется радиальный зазор, а в А зубья зацепляются на полную рабочую высоту.
Если гибкое колесо имеет на 1 зуб меньше, чем жесткое, за 1 оборот генератора вращающееся колесо повернется на 1 шаг между зубьями. А вообще
 .
.
Установлено, что основными критериями работоспособности волновых передач являются: прочность гибкого колеса; прочность подшипников генератора; жесткость генератора и жесткого колеса; износ зубьев. Сегодня известно большое число разновидностей волновых передач.
Применение этих передач определяется следующими достоинствами:
большое передаточное отношение;
большое число зубьев в одновременном зацеплении (на разную высоту); отсюда высокая нагрузочная способность при малых габаритах;
сравнительно высокая кинематическая точность;
малые скорости скольжения в зацеплении, отсюда малый износ, высокий КПД;
малые нагрузки на валы и опоры вследствие симметричности конструкции;
возможность передачи движения через герметичную стенку;
малая инерционность;
возможность использования передачи в качестве дифференциала для сложения двух движений.
Винтовые и гипоидные передачи
Эти передачи для перекрещивающихся валов применяются сравнительно редко.
Винтовая передача осуществляется цилиндрическими косозубыми колесами. При перекрестном расположении осей зубья имеют точечный контакт. Поэтому даже при сравнительно небольших нагрузках происходит быстрый износ и заедание. Этот недостаток и привел к созданию гипоидных передач, где конические колеса имеют косые или прямолинейные зубья, обеспечивая линейный контакт.
1.3.9.4. Червячные передачи
Здесь оси перекрещиваются под углом 90°. Ведущим является червяк с винтовой нерезкой, ведомым - колесо, обработанное так, чтобы оно частично охватывало червяк, с нарезанными зубьями.
Поскольку за один оборот червяка колесо повернется на угол, охватывающий число зубьев колеса, равное числу заходов червяка, то в червячной передаче можно получить большое передаточное отношение. Кроме этого преимущества следует отметить плавность зацепления и бесшумность работы, возможность самоторможения.
Недостатки: сравнительно низкий КПД, повышенный износ и склонность к заеданию; необходимость применения для колес дорогих антифрикционных материалов (бронза); повышенные требования к точности сборки.
Повышенный износ и заедание червячных передач связаны с большими скоростями скольжения и неблагоприятным направлением скольжения относительно линий контакта.
Расчет червячной передачи осуществляют по напряжениям изгиба и контактным напряжениям.
Вследствие относительно невысокого КПД значительная часть энергии привода переходит в редукторе в тепло. Поэтому приходиться расчетом проверять отвод тепла и при необходимости увеличивать поверхность охлаждения устройством на корпусе ребер, устраивать обдув вентилятором с целью искусственного охлаждения.
Глобоидные передачи.
Кроме цилиндрических червяков иногда их выполняют глобоидными. Соответственно, витки червяка образуются на глобоиде. Это повышает нагрузочную -способность в 1,5-2 раза по сравнению с обычными червячными передачами. Повышение нагрузочной способности объясняется одновременным зацеплением большого числа зубьев и благоприятным расположением линий контакта. Расчетные данные для таких передач предусмотрены ГОСТ 9369-66.
1.3.9.5. Цепные передачиЦепная передача основана на зацеплении цепи и звездочек. Принцип зацепления, а не трения, а также повышенная прочность стальной цепи по сравнению с ремнем позволяет передавать цепью, при прочих равных условиях, значительно большие нагрузки. Отсутствие скольжения и буксования обеспечивает постоянство, возможность работы при значительных кратковременных перегрузках. Принцип зацепления не требует предварительного натяжения цепи, в связи, с чем уменьшается нагрузка на валы и опоры. Угол охвата звездочки цепью не имеет такого решающего значения, как охват шкива ремнем. Поэтому цепные передачи могут надежно работать при малых межосевых расстояниях и больших передаточных отношениях, а также передавать мощность от одного ведущего вала нескольким ведомым.
Недостатки: цепь состоит из звеньев, поэтому охватывает звездочку не по окружности, а по многоугольнику, что приводит к усиленному износу шарниров цепи, шуму и дополнительным динамическим нагрузкам. Затрудненный подвод смазки к шарнирам сокращает срок службы передачи.
1.3.9.6. Передача винт-гайкаЭто передача служит для преобразования вращательного движения в поступательное (пример - суппорт). При простой и компактной конструкции передача позволяет получить большой выигрыш в силе (домкрат, винтовой пресс) или осуществлять медленное и точное перемещение. Основной недостаток передачи - низкий КПД.
1.3.10. МуфтыМуфтами в технике называют устройства, которые служат для соединения концов валов, стержней, труб, электрических проводов и т.д. В ДМ рассматривают муфты, применяемые для соединения валов. О разнообразии применяемых муфт можно судить по следующей схеме их классификации.
К глухим относятся втулочная (втулка, заштифтованная на концах соединяемых валов), фланцевая - две полумуфты, скрепленные по фланцам болтами; продольносвертная.
К компенсирующим жестким относятся: кулачково-дисковая, зубчатая. К упругим: муфта с цилиндрическими пружинами; зубчато-пружинная или со змеевидными пружинами; с резиновой звездочкой; МУВП; с упругой оболочкой.
Примеры некоторых конструкций:
продольно-свертная муфта;
муфта кулачковая;
муфта упругая втулочно-пальцевая;
муфта фрикционная.
Литература к теме 1
1. Тарг С.М. Краткий курс теоретической механики, изд.10. - М.: Высшая школа, 1986. - 416с.
2. Феодосьев В.И. Сопротивление материалов, изд.9. - М.: Наука, 1986. - 512с.
3. Теория механизмов и машин: учебное пособие для вузов. - М.: Высшая школа, 1987.
4. Иванов М.Н. Детали машин. - М.: Высшая школа, 1984.
5. Раздаточный материал к курсу лекций по дисциплине "Машины и оборудование" для студентов специальности 060800 "Экономика и управление на предприятии". - Тамбов, 2002.
2. Конструирование, его задачи. Качество технического объекта
Согласно традиционному определению, конструировать - это значит строить механизмы, машины, сооружения с выполнением их проектов и расчетов.
Изменения в технологии создания новых технических объектов, повышение их сложности, переход к проектированию систем, создание новой проектно-конструкторской техники и т.д. привели к появлению новых определений, которые будет возможно рассмотреть позднее.
Основной задачей конструирования в любой отрасли машиностроения является создание агрегата, наиболее полно отвечающего потребностям народного хозяйства, дающего наибольший экономический эффект и обладающего наиболее высокими технико-экономическим показателями, т.е. агрегата высокого качества.
2.1 Понятие о качестве продукцииЦелью любого производственного процесса является получение продукции высокого качества.
Под качеством продукции подразумевают совокупность ее свойств, обеспечивающую удовлетворение требований потребителей и конкурентоспособность продукции в условиях рыночных отношений.
Качество - разностороннее понятие. Оно, вообще говоря, определяется не только техническим уровнем непосредственно самого технического объекта, но зависит от организационных, технических, экономических особенностей предприятия - изготовителя.
Поэтому, говоря о качестве, нередко подразумевают под ним комплекс, по крайней мере, из четырех групп понятий:
техническое понятие о качестве, в которое входит технический уровень выпускаемой продукции, полнота удовлетворения запросов по номенклатуре изделий, технический уровень производства, осуществляющего выпуск данной продукции, оперативность и масштабы внедрения передового опыта в производстве;
эстетическое понятие о качестве, включающее в себя как эстетический уровень выпускаемой продукции, так и соответствие требованиям промышленной эстетики самого производства;
экономическое понятие о качестве, характеризуемое рациональным географическим размещением предприятия, производительностью труда, рентабельностью производства, уровнем организации производства, соответствием цены изделия и его потребительской стоимостью и т.д.;
юридическое понятие о качестве, включающее точность соблюдения договорных обязательств.
В настоящих разработках рассматриваются лишь показатели характеризующие непосредственно сам технический объект, являющийся продуктом производственного процесса. При этом следует заметить, что существующие показатели и характеристики не равнозначны по своей важности. Ряд этих показателей расценивается как критерий развития технических объектов.
Прежде чем рассматривать конкретные показатели, остановимся на определении этого понятия.
2.2 Критерии развития технических объектовСреди параметров и показателей, характеризующих любой технический объект, всегда имеются такие, которые на протяжении длительного времени имеют тенденцию монотонного изменения или тенденцию поддержания на определенном уровне при достижении своего предела. Эти показатели всеми осознаются как мера совершенства и прогрессивности, и они оказывают сильное влияние на развитие отдельных классов технических объектов и техники в целом.
Такие параметры и показатели называют критериями развития технических объектов. Об их важности можно судить по тому факту, что технический прогресс в области любых технических объектов обычно заключается в улучшении одних критериев без ухудшения (во всяком случае, без значительного ухудшения) других. При формировании системы критериев развития должен удовлетворяться ряд условий.
условие измеримости: за критерий развития может быть принят только такой параметр технического объекта, который допускает возможность количественной оценки по одной из шкал измерений.
условие сопоставимости: критерий развития должен иметь такую размерность, которая позволяет сопоставлять технические объекты разных времен и стран.
условие исключения: за критерии развития могут быть приняты только такие параметры технического объекта, которые в первую очередь характеризуют его эффективность и оказывают определяющее влияние.
условие минимальности и независимости вся совокупность критериев развития должна содержать только такие критерии, которые не могут быть логически выведены из других критериев и не могут быть их прямым следствием.
Оценка технического уровня и качества изделия осуществляется путем сопоставительного (сравнительного) анализа в следующем порядке:
выбирается базовое изделие (идеальный вариант, аналог или прототип);
выявляются численные значения основных технико-экологических показателей оцениваемого и базового изделий;
рассчитываются уровни относительных показателей технического уровня и качества;
рассчитывается величина обобщенных показателей технического уровня и качества изделий.
Следует отметить, что главное условие сравнения оцениваемого и базового изделия - сопоставимость элементов изделий, идентичность функционального назначения.
В качестве базового изделия для сопоставления выбирают наилучший, реальный образец данного вида и типоразмера изделий, имеющийся в мировой практике. Он может быть как отечественным, так и зарубежным и именуется аналогом. Иногда при решении задач по модернизации изделий данного вида в качестве базового изделия принимают изделие - прототип которого совершенствуется путем устранения имеющихся недостатков.
В отдельных случаях в качестве базового изделия может быть принято оборудование будущего - идеальный вариант. Показатели, характеризующие идеальный вариант по техническому уровню и качеству рассчитываются исходя из законов развития техники данного вида по критериям развития.
При оценке технического уровня и качества изделий значения основного размерного параметра (производительность, рабочая поверхность, полезный объем и т.д.) не должны отличаться от такового для базового изделия более чем на 20%.
С учетом изложенного, рассмотрим показатели, характеризующие качество и технический уровень технических объектов.
2.3 Показатели технического уровня и качества технических объектов, применяемые в химическом машиностроении
Группа 1 Показатели назначения.
Производительность машины, аппарата (кг/час, т/сут., т/год, м3/ч и т.д.).
Полный или рабочий объем - для аппаратов, назначение которых определяется их объем (м3).
Установленная мощность (кВт).
Давление, напор (МПа, м вод. ст. и т.д.).
Скорость обработки объекта, давления, вращения и т.д. (м/сек, об/сек).
Масса технического объекта (кг).
Габаритные размеры технического объекта (м).
Площадь, занимаемая техническим объектом (м2).
Площадь рабочей поверхности технического объекта: площадь теплообмена, площадь фильтрации (м2).
Выход готового продукта (за вычетом потерь),%.
Степень превращения вещества в техническом объекте или эффективность обработки сырья (%).
Показатели первой группы, вообще говоря, критериями развития не являются и имеют тройное назначение:
во-первых, они являются исходными характеристиками, на основе которых производится расчет критериев развития, предусмотренных в последующих группах показателей;
во-вторых, они позволяют судить о степени соответствия данного технического объекта по своим характеристикам требованиям конкретного потребителя;
в-третьих, учитывая, что по мере исторического развития технических объектов наблюдается стойкая тенденция к росту. Следовательно, сопоставляя соответствующие характеристики с лучшими мировыми достижениями, можно косвенно судить о техническом совершенстве машины или аппарата. Поэтому некоторые авторы, в частности А.И. Половинкин, называют показатели первой группы критериями (производительность и т.д.).
Группа 2 Показатели надежности.
Наработка на отказ (ч).
Установленный ресурс или срок службы до капитального ремонта (ч, мес., лет).
Срок службы до списания (ч, мес., лет).
Срок службы до списания является нормируемым показателем надежности, определяемым проектантом по формуле:
![]()
где ![]() - ресурс до капитального ремонта (ч);
- ресурс до капитального ремонта (ч);
![]() - целесообразное количество капитальных ремонтов технического объекта за весь период его эксплуатации;
- целесообразное количество капитальных ремонтов технического объекта за весь период его эксплуатации;
![]() - количество рабочих дней в году (т.е. без праздничных дней);
- количество рабочих дней в году (т.е. без праздничных дней);
![]() - коэффициент использования оборудования. Для непрерывного режима эксплуатации
- коэффициент использования оборудования. Для непрерывного режима эксплуатации ![]() = 1.
= 1.
Назначенный ресурс между операциями восстановления:
а) между операциями технического обслуживания;
б) между текущими ремонтами (ч).
Суммарная трудоемкость технического обслуживания за время эксплуатации технического объекта (ч).
Суммарная продолжительность плановых ремонтов (ч):
![]() ,
,
где ![]() - средняя продолжительность одного капитального ремонта;
- средняя продолжительность одного капитального ремонта;
![]() - средняя продолжительность одного текущего ремонта;
- средняя продолжительность одного текущего ремонта;
![]() - количество текущих ремонтов, планируемых за срок службы технического объекта.
- количество текущих ремонтов, планируемых за срок службы технического объекта.
Коэффициент технического использования.
В соответствии с ГОСТ 13377-75 коэффициент технического использования представляет собою отношение:
 ,
,
где ![]() - наработка за весь планируемый срок службы машины, аппарата;
- наработка за весь планируемый срок службы машины, аппарата;
![]() - суммарная продолжительность операций технического обслуживания помимо продолжительности плановых текущих и капитальных ремонтов
- суммарная продолжительность операций технического обслуживания помимо продолжительности плановых текущих и капитальных ремонтов![]() .
.
Коэффициент технического использования является критерием развития, позволяющим судить о техническом совершенстве машины, аппарата.
Гарантийный срок работы (ч).
Гарантийный срок работы, как правило, указывается в паспорте технического объекта и выбирается в пределах между минимальным сроком, обеспечивающим конкурентоспособность технического объекта, и наработкой на отказ.
Группа 3 Показатели экономического использования сырья, материалов, топлива, энергии и других ресурсов.
Удельный расход в эксплуатации:
а) пара (кг/ед. главного параметра);
б) воды (м2/ед. главного параметра);
в) сжатого воздуха (м3/ед. главного параметра);
г) тепловой энергии (квт-ч. /ед. главного параметра);
д) электроэнергии (квт-ч. /ед. главного параметра);
е) топлива (кг/ед. главного параметра).
Удельная площадь, занимаемая техническим объектом (м2/ед. главного параметра).
3.2а Производительность в расчете на единицу занимаемой площади или съем продукции с кв. метра площади, занимаемой техническим объектом (кг/ч/м2; шт/ч/м2).
Коэффициент полезного действия.
КПД является важнейшим критерием развития технических объектов, осуществляющих механические, гидромеханические, аэродинамические процессы, и характеризует эффективность использования энергии:
 ,
,
где ![]() - полезно использованная энергия;
- полезно использованная энергия;
![]() - вся затраченная энергия.
- вся затраченная энергия.
Значительно более проблематичной является оценка эффективности аппаратов для теплообменных, массообменных и химических процессов. Краткий обзор методов оценки энергетической оценки теплообменных аппаратов и перечень литературы, посвященной этому вопросу приведен в работе [2].
Анализ методов расчета КПД для массообменных аппаратов содержится в книге В.В. Кафарова Основы массопередачи.
По мнению А.Н. Плановского, применительно к колонной массообменной аппаратуре эффективность аппарата более ярко характеризуется таким показателем, как съем продукции с/м3 объема аппарата.
Компактность:
а) величина поверхности теплообмена, фильтрации, приходящееся на единицу объема аппарата;
б) плотность упаковки, т.е. количество элементов технической системы в единице ее объема.
Важность этого показателя постоянно возрастает в связи с непрерывным увеличением сложности технических объектов в процессе технического прогресса. Ниже этот вопрос рассмотрен более подробно.
Коэффициент автоматизации - численно равен отношению количества управляющих операций, выполняемых непосредственно только техническим объектом, к общему числу управляющих операций, выполняемых суммарно техническим объектом и человеком.
Коэффициент механизации.
Показатель определяется как отношение числа механизированных технологических операций по изготовлению продукции с помощью оцениваемой технической системы к суммарному числу механизированных и ручных операций.
Интегральный экономический показатель качества.
 ,
,
где ![]() - экономический эффект;
- экономический эффект;
![]() - затраты на производство технического объекта;
- затраты на производство технического объекта;
![]() - затраты на эксплуатацию.
- затраты на эксплуатацию.
Группа 4 Эргономические показатели.
Гигиенические:
а) степень соответствия температуры на рабочем месте нормальным условиям (балл);
б) степень соответствия давления на рабочем месте нормальным условиям (балл);
в) степень соответствия влажности на рабочем месте нормальным условиям (балл).
Антропометрические:
а) соответствие изделия требованиям к рабочей позе, зонам достигаемости, физическим усилиям (балл);
б) соответствие изделия требованиям к объему, скорости и точности рабочих движений человека (балл).
Физиологические:
а) соответствие изделия зрительным возможностям человека (балл);
б) соответствие изделия осязательным возможностям человека (балл);
в) соответствие изделия слуховым возможностям человека (балл).
Психологические:
а) соответствие изделия возможностям человека к восприятию и переработке информации (балл);
б) соответствие изделия требованиям к формированию навыков по эксплуатации технического объекта (балл).
Значения эргономических показателей определяются методом экспертных оценок.
Группа 5 Эстетические показатели.
Информационная выразительность (балл).
Рациональность формы (балл).
Рациональность цветового решения (балл).
Степень соответствия моде, стилю, традициям (балл).
Совершенство производственного исполнения и стабильность товарного вида (балл).
Показатели определяются методом экспертных оценок.
Группа 6 Показатели технологичности.
Удельная масса изделия (кг/ед. главного параметра).
Коэффициент использования материалов
 ,
,
где ![]() - масса изделия;
- масса изделия;
![]() - масса израсходованных материалов.
- масса израсходованных материалов.
Это критерий, которому свойственно монотонное возрастание по мере технического прогресса в области технологии машиностроения, стремление к предельному значению
![]() .
.
Удельная трудоемкость изготовления (норма ч/ед. главного параметра)
![]() ,
,
где ![]() - суммарная трудоемкость проектирования, изготовления изделия;
- суммарная трудоемкость проектирования, изготовления изделия;
![]() - главный параметр изделия.
- главный параметр изделия.
Удельная энергоемкость изготовления (квт-ч/ед. главного параметра).
Группа 7 Показатели стандартизации и унификации.
Коэффициент применяемости (%):
![]() ,
,
где п - количество типоразмеров деталей в изделии;
п0 - количество наименований (позиций в спецификации) оригинальных деталей в изделии.
Коэффициент повторяемости:
![]() ,
,
где ![]() - количество деталей в изделии.
- количество деталей в изделии.
При расчете коэффициентов применяемости и повторяемости количество крепежных деталей в изделии (болты, гайки, шайбы, шпильки, шплинты и т.д.) не учитывается.
Коэффициент унификации:
![]() ,
,
где ![]() - количество стандартных деталей в изделии;
- количество стандартных деталей в изделии;
![]() - количество покупных деталей (узлов) в изделии;
- количество покупных деталей (узлов) в изделии;
![]() - количество деталей (узлов), заимствованных из других изделий.
- количество деталей (узлов), заимствованных из других изделий.
Группа 8 Патентно-правовые показатели.
Показатель патентной защиты - показатель характеризует наличие в изделии составных частей, защищенных патентами. Показатель определяется количеством охранных документов, выданных на изделие и его элементы.
Показатель патентной чистоты.
Этот показатель характеризует возможность беспрепятственной реализации изделия за счет отсутствия в нем составных частей, подпадающих под действие охранных документов в стране предполагаемого сбыта. Показатель определяется в результате выполнения патентного обзора.
Группа 9 Показатели безопасности
9.1 а) Уровни звуковой мощности в октавных полосах частот или звукового давления в октавных полосах частот (ДБ).
9.1 б) Корректированный уровень звуковой мощности или эквивалентный уровень звука (ДБА).
9.1 в) Уровень шумовых характеристик по отношению к допустимым предельным значениям. (ГОСТ 12.1 003-83 ССБТ).
9.2 а) Логарифмические уровни вибростойкости в октавных полосах частот (ДБ).
9.2 б) Уровень вибрационных характеристик по отношению к допустимым предельным значениям. (ГОСТ 12.1 012-78 ССБТ).
Категория взрывобезопасности, диктуемая условиями эксплуатации технического объекта.
Группа 10 Показатели транспортабельности.
Степень соответствия массы изделия нормативной грузоподъемности транспортных средств.
Степень соответствия массы изделия нормативной грузоподъемности транспортных средств.
Трудоемкость подготовки изделия к транспортировке (н-ч).
Трудоемкость послетранспортной подготовки изделия к монтажу и эксплуатации (н-ч).
Группа 11 Экологические показатели
Удельный выброс отходов в атмосферу (кг/ч/ед. главного параметра).
Удельный выброс отходов в гидросферу (кг/ч/ед. главного параметра).
Удельный выброс отходов в литосферу (кг/ч/ед. главного параметра).
Относительная концентрация выбросов в атмосферу, гидросферу, литосферу по компонентам:
![]() ,
,
где ![]() - фактическая концентрация;
- фактическая концентрация;
ПДК - предельно допустимая концентрация компонента.
2.4 Выбор главного параметраПри расчете ряда перечисленных выше показателей технического уровня и качества технических объектов требуется использовать главный параметр этих объектов. Что же требуется выбрать в качестве этого главного параметра? Для правильного ответа на этот вопрос полезно рассмотреть несколько различных ситуаций.
Если технический объект имеет определенную производительность, то в качестве главного параметра выбирается производительность машины, аппарата, установки, технологической линии.
Если назначение аппарата определяется его объектом (хранение, транспортировка продукта), то в качестве главного параметра выбирается объем аппарата.
Если технологический процесс может осуществляться в емкостных аппаратах при разных давлениях (в разных схемах), то при сравнении эффективности за главный параметр может быть принято произведение объема аппарата на рабочее давление.
Если технический объект не имеет определенной производительности вследствие переменного состава продукции (различные виды резинотехнических изделий, изготавливаемые на вулканизационных прессах, разные детали из разных конструкционных материалов, обрабатываемые на металлорежущих станках и т.д.), в качестве главного параметра может быть выбрана определяющая конструктивная характеристика машины: высота центров токарно-винторезного станка, диаметр планшайбы карусельного станка, площадь стала продольно-строгального станка, диаметр шнека экструдера или листовой машины и т.д.
В аппаратах и машинах, производительность которых в решающей степени зависит от рабочей поверхности (поверхность теплообмена в теплообменных аппаратах, поверхность фильтрации в фильтрах) главным параметром будет величина этой поверхности.
2.5 Технический прогресс и сложность технических объектовА.И. Половинкин, Б.С. Флейшман и др. попытались проанализировать динамику роста сложности технических объектов на всем историческом пути развития техники и прогнозировать появление новых классов технических систем в будущем.
Для оценки сложности была использована теоретикомножественная концепция, согласно которой сложность системы определяется количеством входящих в эту систему элементов.
Результаты анализа приведены в таблице 2.1
Таблица 2.1
Эволюция сложности технических объектов
| Этап | Уровень сложности | Среднее количество элементов, № | Время возникновения, t |
| 1 | а) Сложные предметы | 10 | 15-10 тысячелетие до н.э. |
| б) Превращающиеся предметы, меняющие свойства при термообработке | 1 | 7 тысячелетие до н.э. | |
| 2 | Простые системы элементов | 10-102 | 1000 лет назад |
| 3 | Простые системы механизмов | 10-103 | ХV - ХIХ века |
| 4 | Простые системы машин | 104 | ХХ в. |
| 5 | Автоматические системы, однозначно реагирующие на ограниченный набор внешних воздействий | 104-105 | ХХ в. |
| 6 | а) Сложные системы с массовым случайным взаимодействием элементов | 104-107 | ХХ в. |
| б) Сложные решающие системы | 104-109 | середина ХХ в. | |
| в) Самоорганизующиеся, превращающиеся сложные системы, имеющие гибкие критерии различения сигналов и гибкие реакции на внешние воздействия | 108-1010 | конец ХХ в. |
Построенная по данным таблицы 2.1 функциональная зависимость сложности технических объектов от времени их появления представляет собою круто восходящую экспоненту, экстраполяция которой позволяет ожидать дальнейшего быстрого роста сложности техники. Поэтому А.И. Половинкин прогнозирует появление в перспективе еще двух классов технических систем:
самоорганизующиеся предвидящие сложные системы, способные к росту, развитию, содержащие 108-1030 элементов;
парадоксальные (перевоплощающиеся) системы, способные управлять пространством и временем, изменять космические формы своего бытия, содержащие 1030-10200 элементов.
Не ставя перед собой задачу оценки обоснованности указанного уровня сложности прогнозируемых систем, отметим лишь, что, по расчетам американского ученого У. Эшби, вся видимая часть Вселенной содержит 1073 атомов.
В.С. Поликарпов, ссылаясь на данные Д. Рорвика, считает, что все вещество Вселенной в пересчете на атомы водорода составляет 1078 атомов. Таким образом, создание парадоксальной системы, соответствующей прогнозу А.И. Половинкина, потребовало бы уничтожения Вселенной.
Но вернемся к земным масштабам. Рассмотрим теоретически достижимую сложность и размеры технических объектов применительно к электронным, и механическим системам. Масса Земли составляет 5976×1021кг.
Наиболее компактными размерами, обеспечивающими получение самых сложных технических систем, обладают сегодня большие интегральные схемы. В 1см3 полупроводникового кристалла, являющегося носителем такой схемы, размещается 104 элементов. Самым распространенным химическим элементом на Земле, используемым в качестве полупроводника, является кремний, содержание которого составляет 15,2% массы планеты, или 908,35×1021кг. Учитывая, что плотность кремния 2330 кг/м3, нетрудно подсчитать, что, использовав весь кремний, имеющийся на Земле, можно было бы получать электронную систему, содержащую 3,9×1030 элементов. Объем такой электронной системы составит 3,9×1020м3, что составляет около 10% объема земного шара.
Необходимо оговориться, что теоретически можно представить себе более высокую плотность упаковки элементов, Природа дает нам такой пример. Человеческий мозг содержит в 1 см3 107 элементов (нейронов). Таким образом, работы по микроминиатюризации в области электроники имеют перспективу.
В этом случае можно представить перспективную возможность получения электронных систем с числом элементов порядка 1030 элементов, не оказывающую заметного влияния на поведение нашей планеты в Космосе.
Характеристики некоторых механических систем приведены в таблице 2.2
Таблица 2.2
Характеристики механических систем
| Технический объект | Объем, ТО (по габаритным размерам) V, cм3 | Масса ТО G, кг | Количество элементов, n | Плотность упаковки,
| Удельная масса,
|
| часы "Луч" | 0,46 | 51 | 102 | ||
| часы "Молния" | 4,7 | 51 | 11 | ||
| Ретурный цилиндр пресса вулканизационного | 5,5×103 | 24 | 31 | 5,6×10-3 | 4,3 |
| Главный цилиндр пресса вулканизационного | 7,9×104 | 351 | 29 | 3,6×10-4 | 4,4 |
| Пресс вулканизационный 100´250´ГЭ | 4,8×105 | 1433 | 195 | 4×10-6 | 3 |
Из таблицы 2.2 следуют выводы:
Даже в самых компактных механических системах плотность упаковки ниже, чем в электронных системах, как минимум, на 2-3 порядка.
В более крупных механических системах плотность упаковки ниже, чем в более мелких за счет увеличения размеров и массы несущих и силовых элементов.
К этому следует добавить, что рост размеров механических систем не безграничен, поскольку, как справедливо утверждали еще древние греки, "человек есть мера всех вещей", а размеры человека достаточно стабильны.
Значительное повышение сложности технических объектов происходит за счет создания электронно-механических систем с целью обеспечения выполнения более сложных функций техническим объектом и повышения уровня автоматизации его функционирования.
Основным материалом, из которого изготавливаются механические технические объекты, являются сплавы на основе железа. Масса железа, которое содержит Земля, 2067,7×1021кг.
С учетом приведенных выше данных можно подсчитать, что предельная сложность механической системы, которую можно создать в земных условиях без тяжелых последствий космического характера - это (1-2) ×1019 элементов.
Электронно-механическая система может иметь число элементов в диапазоне 1019 - 1030 элементов. Таким образом, прогноз А.И. Половинкина в части возможности в перспективе создания парадоксальных систем, по видимому не выполним. Наличие предела сложности технических систем, очевидно, будет оказывать все большее тормозящее влияние на технический прогресс по мере приближения к этому пределу.
Следует заметить, что наряду с техническими трудностями, возрастающими по мере усложнения технических систем и увеличения их масштабов, появляются тормозящие факторы экономического, экологического, политического характера. Так, фактором политического характера стало международное соглашение о запрещении ядерных испытаний. Другой пример - программы ПРО (противоракетной обороны). В 1968 г. американский инженер П. Глазер представил техническую разработку проекта космической электростанции, запускаемой на геостационарную орбиту. Масса такой станции мощностью 5 ГВТ составляет 18000Т, ориентировочная стоимость ее сооружения - до 35 млрд. долларов (дешевле, чем программа "Аполлон", завершившаяся высадкой человека на Луне). Конечно, осуществление такого проекта требует решения многих технических задач, требует международного сотрудничества. Но одной из главных проблем является экологическая, связанная с передачей энергии с электростанции на Землю с помощью СВЧ-пучка, что неминуемо скажется на качестве радиосвязи, а в какой-то зоне может воздействовать на центральную нервную систему людей.
Анализируя динамику информационных процессов, известный американский специалист в области информатики Дерек де Солла Прайс пришел к выводу, что через жизнь одного поколения прогресс науки остановится. Это тоже могло бы стать тормозящим фактором в развитии техники. Правда, с выводом Прайса трудно согласиться. Он противоречит сформулированному Ф. Энгельсом закону ускорения темпов развития науки, который гласит: "Наука растет, по меньшей мере, с такой же быстротой, как и население; население растет пропорционально численности последнего поколения, наука движется вперед пропорционально массе знаний, унаследованных ею от предшествующего поколения".
Поскольку прекращение прогресса в науке при современном ее значении привело бы к прекращению прогресса и в технике, вывод Прайса вступает в противоречие и с открытым К. Марксом законом постоянного развития техники, согласно которому техника развивается постоянно, только исключительные события могут на некоторое время затормозить ее развитие.
По видимому, более правильно говорить не о грядущем прекращении прогресса науки и техники, а о замедлении этого процесса, что означает завершение начавшейся в 40х годах ХХ в. Научно - технической революции и переход к очередному эволюционному этапу развития науки и техники.
Вот к таким серьезным выводам, на уровне философского обобщения, приводит анализ критерия сложности техники.
2.6 Прогнозирование значений показателей технического уровня проектируемой новой техники
Оценка показателей качества и, в частности, критериев развития полезна не только при определении технического уровня того или иного уже существующего технического объекта.
Еще не так давно в отечественном химическом машиностроении было принято конструировать новую технику, закладывая в проектное задание характеристики, соответствующие лучшим мировым образцам аналогичной техники.
Цикл основания производства новых машин от начала их проектирования до выпуска первой серии длится, как правило, несколько лет.
За это время некогда лучшие мировые образцы успевают морально устареть и получается, что только что освоенная в производстве новая машина оказывается морально устаревшей, едва выйдя за ворота завода-изготовителя. Следовательно, для создания техники мирового уровня в проектном задании должны быть заложены не показатели уже существующих машин, даже лучших, а те значения, которых могут достигнуть эти показатели через несколько лет. Для этого нужно уметь прогнозировать значения показателей образцов техники, которые еще не существуют, но которые можно ожидать, изучив, как меняется тот или иной показатель по мере совершенствования данного вида техники на протяжении длительного периода времени.
В качестве примера в таблице 2.3 приведена динамика максимальной производительности колонн синтеза аммиака за время от их изобретения в 1910 г. до наших дней.
Таблица 2.3
Максимальная производительность колонн синтеза аммиака
| Год | Производительность, т/сут. | Год | Производительность, т/сут. |
| 1911 | 0,025 | 1966 | 170 |
| 1012 | 1 | 1970 | 200 |
| 1913 | 30 | 1980 | 1360 |
| 1944 | 40 | 1995 | 1650 |
| 1959 | 93 |
На рисунке приведен график, построенный по данным таблицы 2.3 Из него видно, что сначала мощность колонн возрастало экспоненциально, затем для дальнейшего увеличения производительности стало требоваться все больше времени и творческих усилий. Экспоненциальная функция превратилась в логистическую кривую (S - функции), экстраполяция которой позволяет прогнозировать с той или иной степенью точности не 5-10 лет вперед.
Прогнозирование показателей посредством экстраполяции функции, называемое статистическим прогнозированием, является наиболее старым и распространенным, но далеко не единственным методом прогнозирования.
Проблеме прогнозирования посвящена обширная литература.
Определенную сложность при прогнозировании показателей проектируемого технического объекта представляет сбор данных по показателям аналогичных технических объектов прошлых лет выпуска за достаточно длительный период, разных стран.
Для этого требуется изучение литературы, использование материалов технических архивов заводов-изготовителей и т.д. Кроме того, правильная интерпретация паспортных данных технического объекта обычно требует знания технических особенностей его использования. Покажем это на примере гидравлических вулканизационных четырехэтажных рамных прессов с электрическим нагревом плит, которые с 1963 г. выпускаются заводом "Тамбовполимермаш". Технические характеристики этих прессов приведены в таблице 2.4
Таблица 2.4
Технические данные четырехэтажных рамных гидравлических вулканизационных прессов с электрическим нагревом плит, с плитами 600´600мм
|
пресса Показатель | ВП 9024 М | 160-600-Э4 | 250-600-Э4 | 250-600-4Э | 250-600-4Э | 250-600-4Э | 250-600-4Э | 250-600-4Э | 250-600-4Э |
| Год выпуска | 1963 | 1974 | 1974 | 1980 | 1983 | 1987 | 1988 | 1990 | 1992 |
| Усилие, МН | 1,6 | 1,6 | 2,5 | 2,5 | 2,5 | 2,5 | 2,5 | 2,5 | 2,5 |
| Мощность электронагревателей, кВт | 12 | 15 | 18 | 15 | 20 | 35,9 | 20 | 37,5 | 37,5 |
| Мощность привода насоса, кВт | 2,8 | 5,2 | 5,2 | 7,5 | 8,5 | - | 7,5 | 4 | 4 |
| Длина пресса, мм | 1820 | 1988 | 1988 | 1895 | 1850 | 1850 | 1850 | 1850 | 1850 |
| Ширина пресса, мм | 2400 | 1420 | 1420 | 1420 | 1120 | 1120 | 1120 | 1120 | 1120 |
| Высота пресса, мм | 2600 | 2618 | 2618 | 2618 | 2675 | 2675 | 2675 | 2675 | 2675 |
| Масса пресса, кг | 4690 | 3600 | 4300 | 4250 | 4250 | 3794 | 3970 | 3800 | 4220 |
| Расстояние между плитами, мм | 120 | 125 | 125 | 125 | 125 | 125 | 125 | 125 | 125 |
| Максимальная температура плит, оС | 200 | 200 | 200 | 200 | 250 | 200 | 250 | 250 | |
| Время смыкания плит, с | 8,5 | 12 | 12 | 12 | 12 | 12 | 12 | 12 | |
| Время размыкания плит, с | 8,5 | 5 | 5 | 5-10 | 6 | 5-10 | 5-10 | ||
| Продолжительность вулканизации, мин. | 2-60 | 2-60 | 2-60 | 2-60 | 2-60 | 2-60 | 2-60 | 2-60 | 2-60 |
| Давление на плиту, кг/см2 | 44,5 | 44,5 | 70 | 70 | 70 | 70 | 70 | 70 | 70 |
 Модель
МодельПриведенные в таблице 2.4 данные позволяют рассчитать ряд критериев, характеризующих технический уровень пресса.
Удельная материалоемкость:
![]() ,
,
где М - масса пресса, кг;
p - усилие, развиваемое прессом, кН;
q - расстояние между плитами, м;
b и l - соответственно ширина и длина плиты, м;
п - количество этажей у пресса.
Результаты расчета критерия материалоемкости приведены ниже в таблице 2.5 Динамика показателя говорит о наличии тенденции к снижению удельной металлоемкости прессов. Снижение материалоемкости вулканизационных прессов за последние двадцать лет достигнуто, благодаря двум мерам: переходу на использование в приводе насоса электродвигателей новой серии и изготовлению сварной рамы пресса из листа толщиной 24 мм вместо 25 мм.
Замена электродвигателя явилась следствием научно-технического прогресса в электротехнической промышленности. Отсутствие теоретической проработки узла привода непосредственно разработчиками прессов доказывается достаточно бессистемным варьированием мощностью привода, что видно из таблицы 2.4
Сегодня нет экспериментального материала, позволяющего оценить перспективы дальнейшего облегчения рамы пресса. Дело в том, что лимитирующим фактором является не прочность рамы, расчет которой достаточно разработан, а жесткость, величина которой влияет на толщину выпрессовки. В настоящее время нет данных, позволяющих четко установить допустимый минимум жесткости рамы и, соответственно минимальные толщины ее элементов.
Сложность заключается в том, что величина выпрессовки зависит не только от жесткости рамы, но также от величины удельного давления на плиту, точности дозирования резиновой смеси в форму, состава смеси, размеров резинового изделия.
Поэтому гарантировать сохранение темпов снижения удельной материалоемкости затруднительно.
Критерий производительности пресса определяют по формуле:
![]() ,
,
где z - количество циклов, выполняемых прессом в течение часа.
 ,
,
где ![]() - продолжительность одного цикла, с
- продолжительность одного цикла, с
![]() =
=![]() +
+![]() ,
,
где ![]() - время смыкания плит, с;
- время смыкания плит, с;
![]() - продолжительность тепловой обработки изделия (нагрева и вулканизации), с;
- продолжительность тепловой обработки изделия (нагрева и вулканизации), с;
![]() - время размыкания плит, с;
- время размыкания плит, с;
![]() - время перезарядки, с.
- время перезарядки, с.
Продолжительность тепловой обработки изделия ![]() зависит от состава резиновой смеси, размеров изделия, температуры плит. Как следует из табл.2.4, она может варьироваться в пределах от 120 до 3600 с. Соответственно, в определенных пределах будет варьироваться и критерий производительности.
зависит от состава резиновой смеси, размеров изделия, температуры плит. Как следует из табл.2.4, она может варьироваться в пределах от 120 до 3600 с. Соответственно, в определенных пределах будет варьироваться и критерий производительности.
Продолжительность перезарядки зависит от наличия и конструкции перезарядчика, конструкции пресс-форм, размеров РТИ и, соответственно, количества изготавливаемых за один цикл изделий. При ручной перезарядке по технологии, принятой на Тамбовском заводе асбестовых и резинотехнических изделий, средняя полная продолжительность перезарядки составляет 15 минут.
Критерий электроемкости (модификация удельного расхода электроэнергии) можно рассчитать как отношение суммарной установленной мощности привода насоса и электронагревателей к критерию производительности
 .
.
Результаты расчета перечисленных критериев приведены в табл.2.5
Таблица 5
Критерии развития гидравлических вулканизационных прессов с электрообогревом плит
| Модель пресса | Год выпуска | Критерий материалоемкости, кг/м3 МН | Критерий производительности МН×м3 | Критерий электроемкости, кВт/МН×м3 |
| ВП9024М | 1963 | 0,17×105 | 0,958-0,218 | 15,4-67,8 |
| 160-600-Э4 | 1974 | 0,175×105 | 0,999-0,228 | 20,2-88,6 |
| 250-600-Э4 | 1974 | 0,095×105 | 1,56-0,356 | 14,87-65,16 |
| 250-600-4Э | 1980 | 0,094×105 | 1,56-0,356 | 14,4-63,2 |
| 250-600-4Э | 1983 | 0,094×105 | 1,457-0,356 | 19,56-80,2 |
| 250-600-4Э | 1987 | 0,084×105 | 1,56-0,356 | 23-100,8 |
| 250-600-4Э | 1988 | 0,088×105 | - | - |
| 250-600-4Э | 1990 | 0,084×105 | 1,457-0,356 | 28,48-116,5 |
| 250-600-4Э | 1992 | 0,094×105 | 1,457-0,356 | 28,48-116,5 |
Данные таблицы 2.5, в частности, ее последнего столбика, трудно комментировать, не зная технологии процесса вулканизации резины. Дело в том, что повышение мощности электронагревателей плит вызвано необходимостью повышения температуры вулканизации. Известно, что повышение температуры вулканизации (когда состав резины допускает такую возможность) на 10 градусов увеличивает скорость процесса вдвое. Таким образом, рост расхода энергии в единицу времени приводит к более быстрому росту производительности машины.
Таким образом, анализ критериев развития технического объекта позволяет:
оценить технический уровень данного объекта;
лучше понять особенности технологии эксплуатации технического объекта;
понять тенденции и направления совершенствования технического объекта и прогнозировать темпы этого совершенствования.
Литература к теме 2
1. Показатели технического уровня и качества изделий химического машиностроения. Методические разработки для студентов специальностей 060800, 170500, 330200 Сост. Капитонов Е.Н., Таров В.П. - Тамбов: Изд-во ТГТУ, 2001. - 27с.
3. Описание ТО на основе системного подхода 3.1 Некоторые основные понятия техники
Результатами инженерного творчества являются новые более совершенные технические объекты и технологии.
Техническим объектом называется созданное человеком, реально существующее устройство, предназначенное для удовлетворения определенной потребности.
Любой из элементов устройства (агрегат, блок, узел, деталь) тоже является техническим объектом, т.е. можно говорить об иерархии технических объектов. Отсюда понятие системы, подсистемы, надсистемы.
Обработка вещества, энергии или сигналов представляет собой выполнение с помощью ТО некоторой четко определенной последовательности операций.
В связи с этим технологией называют способ, метод или программу преобразования вещества, энергии или информационных сигналов из заданного начального состояния в заданное конечное состояние с помощью определенных ТО.
3.2 Описание ТО. Методы декомпозицииКаждый ТО может быть представлен описаниями, которые по мере проработки ТО становится все более детальными и полными. Эти описания характеризуются следующими свойствами:
каждое последующее описание является более детальным по сравнению с предыдущим;
каждое последующее описание включает в себя предыдущее.
Таким образом, можно говорить об иерархии описаний.
Самое первое описание - потребность (человека) или функция ТО. Это краткое описание назначения ТО или цели его создания, которое должно включать следующую информацию: наименование действия (Д); объект или предмет обработки, на который направлено это действие (G); особые условия и ограничения (Н).
Суть можно понять из следующих примеров.
| ТО | Д | G | H |
| мельница | размалывает | зерно | на муку |
| выпарной аппарат | выпаривает | морскую воду | для получения пресной воды |
| термометр | измеряет | температуру среды | - |
| путепровод | обеспечивает движение | автомобиля | через препятствие |
| транспортер | перемещает | груз | - |
| грузовой автомобиль | перевозит | груз | - |
| поезд | перевозит | груз | - |
| самолет | перевозит | груз | - |
| теплоход | перевозит | груз | - |
| телега | перевозит | груз | - |
Примеры, приведенные в таблице, показывают, что уже на первом, самом поверхностном этапе анализа ТО выявляется необходимость творческого подхода, поскольку одна и та же функция может осуществляться с помощью различных ТО.
Это относится к любой технологической задаче. Пресную воду из соленой помимо выпаривания в аппаратах самых различных конструкций с последующей конденсацией образующегося пара, можно получить вымораживанием или электродиализом; измельчать твердые материалы можно в мельницах различных конструкций, в дробилках, пневматических измельчителях и т.д.
Резать стальные заготовки из листа можно на гильотинных ножницах, автогенной резкой, электродуговой резкой, струей плазмы и т.д.
Поэтому уже выполнение первого этапа анализа ТО заставляет задумываться о выборе первоначально нескольких прототипов для последующего анализа.
3.1.2 Техническая функцияНа втором этапе описания определяется техническая функция, которая в дополнение к описанной выше потребности включает физическую операцию (физическое превращение, преобразование), с помощью которой реализуется потребность.
Описание физической операции формализовано можно представить состоящим их трех компонент
![]() ,
,
где АТ - входной поток вещества, энергии или сигналов, т.е. их исходные состояния;
СТ - их выходной поток, т.е. конечное состояние;
Е - наименование операции Коллера по превращению АТ в СТ.
Здесь необходимо остановиться на понятии операции Коллера. В 1976 г. немецкий ученый Коллер предложил 12 пар операций (Половинкин добавил к нам еще 2), которые по его мнению, позволяют описывать ФО (физические операции) любого ТО или его элемента независимо от их физического принципа действия. Это удобно, в частности, для математического моделирования.
Например, аналоговые ЭВМ, используя математическую аналогию некоторых процессов (на которую указывает общность операций Коллера), позволяет моделировать процессы. Так, гидравлическое сопротивление при движении воды в трубе выражается законом Дарси-Вайсбаха
 .
.
Сопротивление при протекании электрического тока по проводнику выражается законом Ома
![]() ,
,
где r - удельное сопротивление;
l и F - длина и площадь поперечного сечения проводника.
Подобие позволяет вести электромоделирование по АЦМ вместо экспериментов с жидкостью.
Оба процесса определяются одной операцией Коллера - "проведение".
Вот эти операции.
Излучение - поглощение. Излучение связано с источником энергии, в том числе природным, поглощение - со стоком.
Проводимость - изолирование. Для возникновения потока, кроме наличия источника и стока, требуется, чтобы между ними было проводящее пространство.
Сбор - рассеяние. Операция "сбор" служит для того, чтобы поток энергии, вещества и сигналов, распространяющийся по всем направлениям, заставить протекать в одном направлении или сфокусироваться в одной точке. Пример: патрубок, через который вытекает жидкость из емкости. Рассеяние - обратная операция. Пример: барботер, распылитель.
Проведение - непроведение. Операция "проведение" обеспечивает движение сконцентрированного потока по заданному пути с помощью технических средств (ZB, трубопровод), т.е. это движение, ограниченное связями. Непроведение - свободное движение, при котором ТО не оказывает никакого влияния на естественное направление распространения потока (струя воды из крана, световой луч).
Преобразование - обратное преобразование. Это наиболее распространенные основные операции, обеспечивающие изменение свойств энергии, вещества и сигналов. Сюда относится преобразование одного вида энергии в другой, изменение агрегатного состояния вещества, изменение проводимости, магнитных свойств и т.д.
Увеличение - уменьшение. Примеры ТО: зубчатые передачи, вентили, задвижки и т.д.
Изменение направления - изменение направления. Здесь могут быть одинаковые ТО с проведением (5).
Выравнивание - колебание. Ресивер выравнивает пульсирующий поток, пульсатор, вибратор - наоборот.
Связь - прерывание. ТО - задвижки, соединительные муфты и т.д.
Соединение - разъединение. Примеры реализации операций "соединение": смесители, насосы (соединяющие энергию и вещество). Примеры реализации операции "разъединение": сепараторы, центрифуги, ректификаторы, фильтры. Примеры показывают, что указанные операции относятся к неоднородным потокам (ZB, разные компоненты смеси).
Объединение - разъединение. Здесь речь идет об однородных потоках энергии, вещества и сигналов. Пример: тройники на водопроводах, электросети.
Накопление - выдача. Пример: для потоков энергии - механические, гидравлические, пневматические, электрические и тепловые аккумуляторы; для веществ - резервуары, газовые баллоны, бункеры и т.п.; для сигналов - перфокарты, магнитные ленты и диски, фотопленки и т.д.
Отображение - обратное отображение. Отображение - когда реальный поток энергии, вещества, сигналов получает информационное отображение в графическом, числовом и другом визуальном виде. Обратное отображение - когда задано числовое или графическое значение, а на выходе реальный поток.
Фиксирование - расфиксирование. Фиксирование связано с уменьшением числа степеней свободы движения ТО. Расфиксирование - увеличение числа степеней свободы.
Иногда не удается однозначно подобрать операцию Коллера, тогда можно даватьи свое подходящее наименование. Это не приносит роковых последствий.
Примеры описания физических операций (ФО)
| ТО | АТ | Е | СТ |
| мельница | зерно + механическая энергия | соединение | мука |
| выпарной аппарат | раствор + тепловая энергия | соединение и преобразование | вторичный пар и упаренный раствор |
| центрифуга | суспензия + механическая энергия | разъединение | осадок и фугат |
| светильник | электрический ток | преобразование | световой поток |
Следующий, более высокий уровень описания ТО, - функциональная структура (ФС).
Большинство ТО состоит из нескольких элементов (агрегатов, узлов, деталей), каждый из которых выполняет определенную функцию и реализует определенную физическую операцию. Между элементами имеются два вида связей и соответственно два вида их структурной организации. Во-первых, элементы имеют определенные функциональные связи друг с другом, которые образуют конструктивную функциональную структуру.
Кроме функциональных связей между элементами ТО имеются еще потоковые связи, поскольку элементы, реализуя определенные физические операции, образуют поток преобразуемых или превращаемых веществ, энергии, сигналов.
Взаимосвязанный набор физических операций, реализующий определенный поток преобразований вещества, энергии или сигналов, называется потоковой функциональной структурой.
Конструктивная и потоковая функциональные структуры взаимно дополняют друг друга.
При конструировании они помогают решать такие задачи, как исключение или добавление отдельных элементов, их объединение в один и т.д.
3.2.4 Построение конструктивной функциональной структурыВ основу анализа функций ТО положен тот факт, что любой ТО может быть разделен на несколько функциональных элементов, каждый из которых имеет минимальное число (не менее одной) определенных функций. Элементом может быть агрегат, блок, деталь или часть детали.
При изучении объекта, который нужно усовершенствовать, необходимо в первую очередь уточнить следующее:
какие функции выполняет каждый элемент ТО и как элементы функционально связаны между собой;
какие физические операции (преобразования) выполняет каждый элемент и как они взаимосвязаны между собой;
на основе каких физико-технических эффектов работает каждый элемент ТО и как они взаимосвязаны между собой.
После выяснения этих вопросов появляется четкое представление об устройстве ТО с функциональной и физической точек зрения.
Изделие и его элемент представляют собой удобную для анализа двухуровневую систему. Но в сложных ТО элемент сам может рассматриваться как система из элементов более низкого уровня и так до получения неделимого элемента, попытка деления которого приведет к получению элементов, не имеющих самостоятельной функции или с одинаковыми функциями.
Вообще говоря, существуют банки данных по характеристикам наиболее распространенных функциональных элементов.
Фрагмент таких данных представлен в следующей таблице.
| класс функциональных элементов | вид ТО, в котором могут присутствовать функциональные элементы | описание функции элемента |
| Несущие элементы | любой многоэлементный ТО | Определяют форму ТО и взаимное расположение его элементов |
| Двигатели | ТО с механическим движением | Преобразуют исходный вид энергии в механическую |
| Движители | ТО, обеспечивающие движение объекта | Преобразуют работу двигателя в работу по преодолению сопротивления среды движению объекта |
| Элементы передачи | ТО с рабочим органом, выполняющим движение | Передача движения и моментов с одновременным преобразованием скоростей, моментов, сил, их направлений |
| Элементы формирования объемов и потоков | ТО с объемами жидких, газообразных, сыпучих веществ | Хранят или транспортируют жидкость, газ, сыпучую среду |
Одновременно с разделением ТО на элементы выделяют элементы окружающей среды, с которыми данный ТО находится во взаимодействии и которые поэтому влияют на конструкцию ТО. Сюда относятся объекты, воспринимающие действие ТО (обрабатываемый с помощью ТО материал), подводимая к ТО энергия, управляющие сигналы, отравляемая среда, излучения и т.д.
Среди выделенных элементов ТО при конструировании особое внимание уделяют главным элементам. К ним относятся рабочие органы ТО и другие элементы, которые непосредственно взаимодействуют с предметом обработки и другими объектами окружающей среды.
При выделении главных элементов нужно иметь в виду следующие их свойства:
функция главных элементов, как правило, совпадает с функцией ТО или в решающей мере зависит от функции ТО;
объекты окружающей среды (ОС) для главных элементов обычно совпадают с объектами, на которые направлено действие ТО.
Примеры главных элементов объектов окружающей среды
| ТО | ОС | Главный элемент | Функция главного элемента |
| Шариковая авторучка | Бумага | Шариковый узел | Образует на бумаге видимый след |
| Шнековый смеситель | Компоненты смеси | Шнеки | Транспортируют и смешивают компоненты |
| Щековая дробилка | Материал, подлежащий дроблению | Щеки | Раздавливает материал |
| Двигатель внутреннего сгорания | Двигатель внутреннего сгорания | Поршни и цилиндры | Вращает вал |
После выявления элементов ТО и их функций можно построить конструктивную функциональную структуру ТО. Она представляет собой ориентированный граф, вершинами которого являются наименования элементов ТО и объектов ОС, а ребрами - функции элементов.
При построении ФС сначала изображают вершины: верхний горизонтальный ряд - объекты ОС, ниже - элементы ТО. После этого строят направленные ребра графа. Ребра выходят из вершин-элементов, чьи функции они описывают, а заканчиваются в вершинах-элементах, работу которых они обеспечивают, или в вершинах-объектах ОС, взаимодействующих с рассматриваемым элементом. Из каждой вершины элемента выходит столько ребер, сколько функций имеет элемент. Простые ребра начинаются в одной вершине и заканчиваются в другой. Но некоторые элементы ТО обеспечивают соединение или взаимодействие между несколькими элементами и объектами ОС. В этом случае ребро имеет один выход и несколько входов, соединенных между собой так называемой U-вершиной. Чтобы было понятно сказанное выше, рассмотрим пример построения графа для шарикоподшипника.
Шарикоподшипник, как известно, предназначен для снижения трения (момента вращения) между втулкой вращающейся детали и неподвижной осью. Втулка и ось в данном случае являются объектами окружающей среды.
Разбивка шарикоподшипника на элементы с определением их функций дает следующий результат.
| Элемент | Функция | ||
| обозначение | наименование | обозначение | описание |
| Е0 | шарики | Ф0 | снижают момент вращения втулки (V1) вокруг оси (V2) |
| Е1 | наружное кольцо | Ф1 | обеспечивает качение втулки по шарикам |
| Е2 | внутреннее кольцо | Ф2 | обеспечивает качение шариков по оси колеса |
| Е3 | сепаратор | Ф3 | обеспечивает равное удаление шариков друг от друга |
Из таблицы видно, что главным элементом являются шарики, функция которых совпадает с функцией всего подшипника.
Конструктивная ФС имеет следующий вид.
Подобная схема позволяет искать пути совершенствования конструкции. Например, шарики выполняют свою функцию и без колец. Пример: игольчатый подшипник.
3.2.5 Построение потоковой функциональной структурыВ этом случае компоненты ОС считают источником входящих в ТО потоков или стоком выходящих из ТО потоков. Конструктивные элементы ТО нумеруют по возможности в том порядке, в каком поток проходит через эти элементы.
Выше говорилось о том, что поток возникает как следствие определенных физических операций, преобразующих вещество, энергию или информацию. Поэтому перед построением потоковой ФС целесообразно составить таблицу элементов ОС и ТО с указанием этих физических операций.
Приведем такую таблицу для бытовой электроплитки, стоящей на столе и предназначенной для нагревания емкости (кастрюли) с водой.
Основная ФО электроплитки - преобразование электрической энергии в тепловую, т.е. АТ - электрический ток; Е - преобразование; СТ - тепло.
Таблица.
| № элемента и объекта ОС | Наименование элемента и объекта ОС | ФО | ||||
| Вход АТ | № источника | Операция Коллера | Выход СТ | № приемника | ||
| 0-1 | Электрическое напряжение | - | - | - | - | - |
| 0-2 | Емкость с жидкостью | тепловая энергия | 3 | поглощение | - | - |
| 0-3 | Стол | - | - | - | - | - |
| 1 | Разъем | 1. электрическое напряжение 2. перемещение | 0-1 | связь - прерывание | 1. электронапряжение 2. его отсутствие | 2 |
| 2 | Провод | электрическое напряжение | 1 | проведение и преобразование | электрический ток | 3 |
| 3 | Спираль | электрический ток | 2 | преобразование | тепловая энергия | 4 0-2 |
| 4 | Огнеупорный элемент | тепловая энергия электрическое напряжение | 3 3 | уменьшение изолирование | тепловая энергия электрическое напряжение | 0-3 4 |
| 5 | Корпус | вес ТО степень свободы перемещения = 4 | 0-2 4 4 | проведение уменьшение | сила реакции стола степень свободы перемещения = 0 | 0-3 4 |
По данным таблицы может быть построена конкретизированная или абстрагированная потоковая ФС.
Эта схема позволяет проанализировать эффективность потоков, например, в данном случае использование тепловой энергии.
Следует заметить, что для реализации одной и той же потребности может существовать несколько альтернативных физических операций. Так, нагревание емкости с жидкостью помимо электроплитки может осуществляться на газовой плите, на плите, обогреваемой пламенем от сжигаемых дров, угля и пр., на костре и т.д. Поэтому для выбора эффективного решения задачи может потребоваться составление потоковых функциональных структур для нескольких прототипов. В этом случае нужно выбрать наиболее эффективную из них. Реализация ФО происходит на основе одного или нескольких физико-технических эффектов. Под физико-техническими эффектами понимают различные приложения физических законов, закономерностей и следствий из них, физические эффекты и явления, которые могут быть использованы в технических устройствах.
В обобщенном виде описание физико-технического эффекта состоит из 3х компонент: А ® В ® С, где А - входной поток вещества, энергии или сигналов; С - выходной поток; В - физический объект, обеспечивающий преобразование А в С.
Если это сравнить с данным ранее описанием физической операции, то виден шаг вперед в области конкретизации решения задачи. Вместо операции Коллера, символизирующей преобразование А в С, появляется более конкретный физический объект.
В качестве иллюстрации рассмотрим некоторые примеры физико-технических эффектов.
| физико-технический эффект | А | В | С |
| Закон Гука | сила | твердое тело | линейная деформация |
| Закон Джоуля-Ленца | электрический ток | проводник | теплота |
| Пьезоэлектрический эффект | деформация (сила) | пъезокристалл | электрическое поле |
Конечно, держать в голове все законы физики, химии, механики достаточно сложно. Поэтому полезно иметь фонд физико-технических эффектов. Пример такого фонда, включающего 120 ФТЭ, приведен в книге А.И. Половинкина "Основы инженерного творчества". Можно рекомендовать и книгу Т.И. Трофимова Физика: 400 основных законов и формул. Справочник. - М.: Высшая школа, 1993., а также Основные формулы физики / Под ред.Д. Мензела. - М.: Изд-во инженерной литературы, 1957. - 657с. Подбор ФТЭ для каждой физической операции позволяет перейти к следующему шагу конкретизации задачи - построению физического принципа действия.
3.2.6 Построение физического принципа действия (ФПД)Под ФПД понимают ориентированный граф, вершинами которого являются наименования физических объектов В, а ребрами входные А и выходные С потоки вещества, энергии и сигналов. Таким образом, во многих случаях ФПД можно построить с помощью потоковой ФС путем замены наименований элементов или физических операций на наименования объектов В.
Прежде чем приступить к построению ФПД, введем понятие элементарной физической операции. Это такая ФО, которая может быть реализована с помощью одного физико-технического эффекта. Далее работа выполняется в следующем порядке. Рассмотрим его на примере электроплитки, для которой уже рассмотрели потоковую ФС.
Строят абстрагированную потоковую ФС. В этом случае разъем можно рассматривать просто как два проводника обеспечивающие связь и прерывание цепи; провод после разъема - это проводник, обеспечивающий проведения тока к нагревателю (спирали); спираль - проводник, обеспечивающий преобразование электрической энергии в тепловую; огнеупорный элемент - твердое тело, уменьшающее поток тепловой энергии в ненужном направлении и обеспечивающее электрическую изоляцию; емкость с жидкостью - обеспечивает поглощение тепловой энергии; корпус - твердое тело, обеспечивающее равновесие силы тяжести плитки и реакции стола.
Проводят анализ потоковой ФС и выявляют сложные ФО, которые реализуются с помощью нескольких ФТЭ.
Для узлов ТО, имеющих сложные ФО, строят потоковую ФС, состоящую только из элементарных ФО и таблицу описания ФО. Это не всегда удается сделать, тогда оставляют сложную ФО, реализуемую комплексным ФТЭ.
Для каждой элементарной ФО составляют таблицу описания ФТЭ.
| № элементарной ФО и ФТЭ | Компоненты описания ФТЭ | Наименование ФТЭ | ||
| А | В | С | ||
| 1 | электрическое напряжение перемещение | два проводника | электрическое напряжение 0 или 1 | эффект соединения - разъединения электрической цепи |
| 2 | электрическое напряжение | проводник | электрический ток | закон Ома |
| 3 | электрический ток | проводник | тепловая энергия | закон Джоуля-Ленца |
| 4а | тепловая энергия (температура Т1) | твердое тело | тепловая энергия (Т1 < Т2) | закон теплопроводности Фурье |
| 4б | электрическое напряжение U ¹ 0 | изолятор | электрическое напряжение U = 0 | электроизоляционный эффект |
| 5 | сила тяжести Р | твердое тело | сила реакции R = - P | эффект равновесия сил |
| 0-2 | тепловая энергия | жидкость (температура Т1) | тепловая энергия (температура жидкости Т2 > Т1) | закон теплопроводности Фурье |
На основе потоковой ФС и приведенной таблицы изображают ФПД.
Эта схема ФПД, по существу представляет собой принципиальную схему ТО, в которой упрощенно-идеализовано показаны основные конструктивные элементы, обеспечивающие реализацию ФПД, и указаны направления потоков и основные физические величины, характеризующие используемые физико-технические эффекты. Принципиальная схема облегчает последующую разработку технического решения. ТР может быть описано с любой степенью детализации. Это как бы безразмерное описание ТО, которое может иметь самые различные реализации по параметрам.
Заключительной стадией разработки ТО является создание проекта, в котором указываются значения всех параметров, разрабатываются рабочие чертежи и другая конструкторская документация.
Ясно, что выбор функциональных структур, ФПД, технических решений - это задачи многовариантные. В каждом случае нужно выбирать наиболее эффективный вариант.
Литература к теме 3
6. Половинкин А.И. Основы инженерного творчества. - М.: Машиностроение, 1988. - 368с.
7. Автоматизация поискового конструирования. Под ред.А.И. Половинкина. - М.: Радио и связь, 1981. - 344с.
8. Техническое творчество: теория, методология, практика. Энциклопедический словарь-справочник. Под ред.А.И. Половинкина, В.В. Попова. - М.: НПО "Информсистема", 1995. - 408с.
4. Требования, предъявляемые к техническим объектам
При разработке технического объекта необходимо учитывать требования, которым должен удовлетворять проектируемый объект.
В 1950 г. немецкий инженер Ф. Кессельринг предпринял попытку собрать все требования, которые ставят перед собой конструкторы, с тем, чтобы в качестве декомпозиции процесса проектирования, т.е. разделения сложной задачи на ряд более простых, превратить проектирование в процесс последовательного удовлетворения одного требования за другим - подобно школьной задаче в нескольких действиях.
Список Ф. Кессельринга включал более 700 требований. Это был неполный список, сегодня известно более 2500 требований.
Кессельрингу не удалось решить поставленную задачу, поскольку многие требования противоречат друг другу. Например, требование повышения уровня автоматизации технического объекта противоречат требованию всемерного упрощения конструкции и т.д.
Таким образом, в каждом случае конструктор должен решать, какое требование следует удовлетворять, а каким следует пренебречь.
Тем не менее, существование списка требований и его пополнение чрезвычайно полезно, поскольку заставляет обратить внимание на те стороны объекта, которые подчас кажутся банальными, а на деле упускаются.
Ниже приведены некоторые примеры требований:
подчинять конструирование задаче увеличения экономического эффекта, определяемого в первую очередь полезной отдачей машины, ее долговечностью и стоимостью эксплуатационных расходов за весь период использования машины;
добиваться максимального повышения полезной отдачи путем увеличения производительности машины и объема выполняемых ею операций;
добиваться всемерного снижения расходов на эксплуатацию машин уменьшением энергопотребления, стоимости обслуживания и ремонта;
увеличивать степень автоматизации машин с целью увеличения производительности, повышения качества продукции и сокращения затрат на рабочую силу;
увеличить долговечность машин;
обеспечивать длительный моральный срок службы, закладывая в машины высокие исходные параметры и предусматривая резервы развития и совершенствования машин;
закладывать в машины предпосылки интенсификации их использования повышением универсальности и надежности;
предусматривать возможность создания производных машин с максимальным использованием конструктивных элементов базовой машины;
стремиться к сокращению числа типоразмеров машин;
стремиться к устранению капитальных ремонтов за счет наличия сменных частей;
последовательно выдерживать принцип агрегатности;
исключать необходимость подбора и пригонки деталей при сборке, обеспечивая их взаимозаменяемость;
исключить операции выверки, регулировки деталей и узлов по месту; предусматривать в конструкции, фиксирующие элементы, обеспечивающие правильную установку деталей и узлов при сборке;
обеспечивать вас окую прочность деталей за счет придания им рациональных форм, применения материалов повышенной прочности, введения упрочняющей обработки;
в машины, узлы и механизмы, работающие при циклических и динамических нагрузках, вводить упругие элементы, смягчающие колебания нагрузки;
делать машины неприхотливыми к уходу, устранять необходимость периодической регулировки и т.д.;
предупреждать возможность перенапряжения машины, для чего вводить автоматические регуляторы, предохранительные и предельные устройства, исключающие возможность эксплуатации машины на опасных режимах;
исключать возможность неправильной сборки деталей и узлов, нуждающихся в точной взаимной координации, введением блокировки;
заменять периодическую смазку непрерывной автоматической;
избегать открытых механизмов и передач;
обеспечить надежную страховку резьбовых соединений от самоотверачивания;
предупреждать коррозию деталей;
стремиться к минимальному весу машин и минимальной металлоемкости.
На этом пункте стоит остановиться особо. Целый ряд фактов говорит о том, что в части металлоемкости конструкции мы еще сильно отстаем в ряде отраслей машиностроения от развитых капиталистических стран.
Так, материалоемкость экскаватора ЭО-6121 на 9 тонн выше экскаватора фирмы Поклейн (ФРГ), башенный кран КБ-405-2 на 26 тонн тяжелее аналога, выпускаемого фирмой Рейнер (ФРГ), металлоемкость трактора T-130М выше американского аналога Д-7Р на 730 кг.
У "Камаза" на 1 т грузоподъемности приходится 877 кг собственного веса, а у "Магируса" (ФРГ) - 557 кг / 1 т.
На перевозку избытка собственного веса "Камаз" перерасходует на 1 машину 3 т/год.
Далее переходим к следующим:
всемерно упрощать конструкцию машин;
заменять, где это возможно, механизмы с прямолинейным возвратно-поступательным движением механизмами с вращательным движением;
обеспечивать максимальную технологичность деталей и узлов;
сокращать объем механической обработки, предусматривая изготовление заготовок с формой, приближающейся к окончательной форме изделия;
осуществлять максимальную унификацию элементов в применение нормализованных деталей;
экономить дорогостояще и дефицитные материалы;
придавать машине простые и гладкие внешние формы, облегчающие содержание машины в опрятном состоянии;
соблюдать требования технической эстетики;
делать доступными и удобными для осмотра узлы, нуждающиеся в периодической проверке;
обеспечивать безопасность эксплуатации агрегата;
непрерывно совершенствовать конструкцию машин, находящихся в серийном производстве;
при проектировании новых конструкций проверять все элементы новизны экспериментов;
шире использовать опыт исполненных конструкций, опыт смежных, а в нужных случаях и отдаленных по профилю отраслей машиностроения.
Разумное сочетание требований достигается оптимизацией конструкции. В некоторых случаях задачи оптимизации решаются достаточно просто. В других случаях решением таких задач приходится заниматься целыми институтами.
Изложенные требования не являются разрозненными, никак не связанными друг с другом случайными рекомендациями. Они являются отражением воздействия современной НТР на технику. В работе "НТР и преимущества социализма", [Мысль, 1975] отмечается: "Обобщение тенденции развития техники и научных разработок дает возможность отметить следующие особенности создаваемых рабочих машин:
А. В области использования сил природы - все большее использование физических, химических, биологических процессов, переход к комплексной технологии, новый видам движения материи, высоких и низких потенциалов (давлений, температур и т.п.).
Б. В области конструкционных и организационно-технических форм - повышение единичной мощности, интеграция процессов в одном органе, рост прочности связей, обеспечение динамичности конструкций, широкое использование искусственных материалов, интеграция машин во все большие системы-линии, участки, узлы, комплексы. Развитие динамичности достигается повышением стандартизации, унификации, универсализации, блочности и агрегатирования. Эта динамичность отражает многообразие функций техники. Прогресс же стандартизации, агрегатирования характеризует единство техники на естественнонаучной основе.
В. В области принципов воздействия на предмет труда - максимально возможное, прямое использование сил природы, тенденция к изменению фундаментальных основ перерабатываемых веществ и получение конечного продукта.
Литература к теме 4
Похожие работы
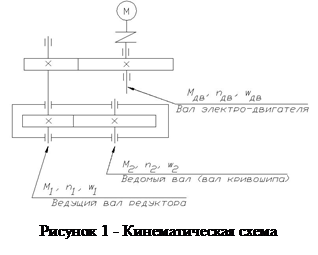
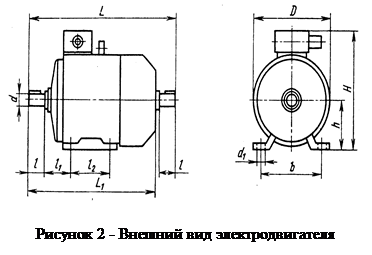
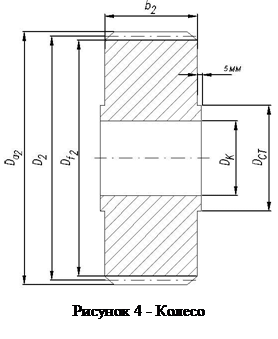
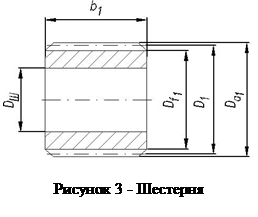
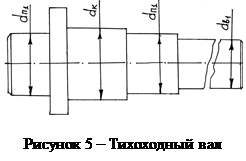
... масштабе (на чертеже) равны: ; ; ; , здесь и далее величина в скобках обозначает размер в миллиметрах на чертеже. ПЛАН СКОРОСТЕЙ Построение планов скоростей и ускорений проводится на основе последовательного составления векторных уравнений для точек звеньев механизма, начиная с ведущего звена, угловая скорость w1 которого задана. Находим численное значение скорости точки B из выражения: ...
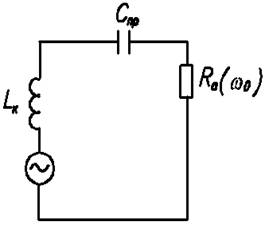
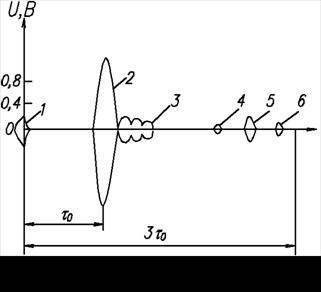
... существенные случайные независимые отклонения при изготовлении штырей. Конструирование преобразователей фильтров на ПАВ. При конструировании фильтров на ПАВ необходимо решить ряд вопросов, связанных с вторичными эффектами, к числу которых в первую очередь следует отнести эффекты отражения акустических волн от штырей преобразователей, от краев звукопровода и т.д. Наиболее существенное влияние ...
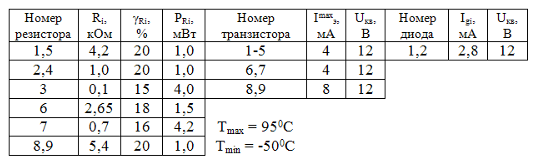
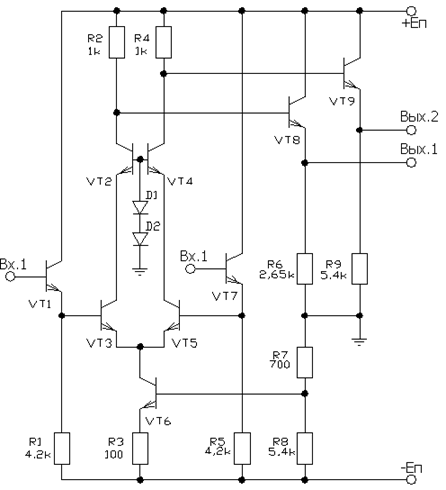
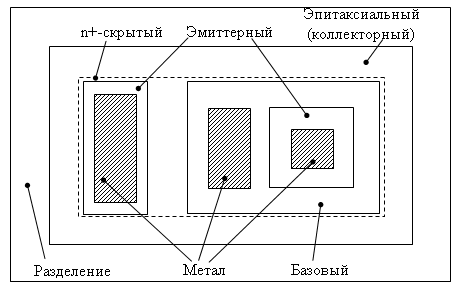
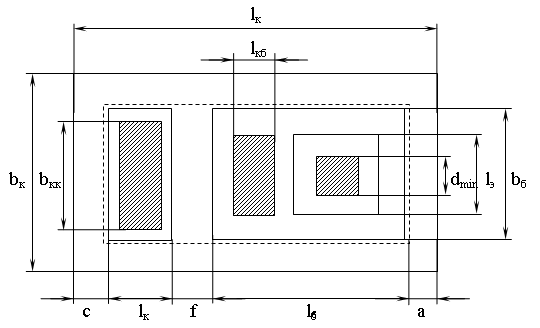
... – это законченный элемент ИМС, который можно использовать при проектировании аналоговых микросхем. 1 Общие принципы построения топологии биполярных Имс Общего подхода к проектированию биполярных интегральных микросхем нет и быть не может, каждый тип характеризуется своими особенностями в зависимости от требований и исходных данных ИМС. Исходными данными при конструировании микросхем являются: ...
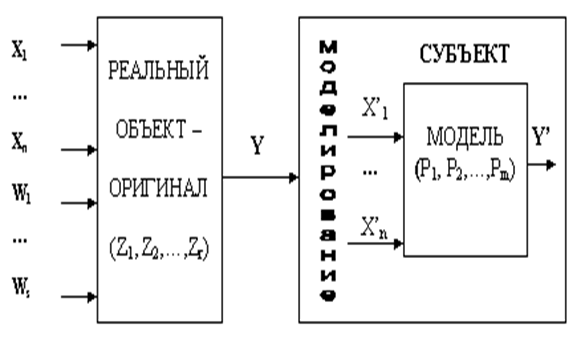
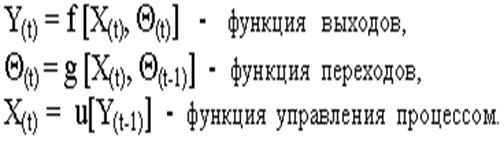
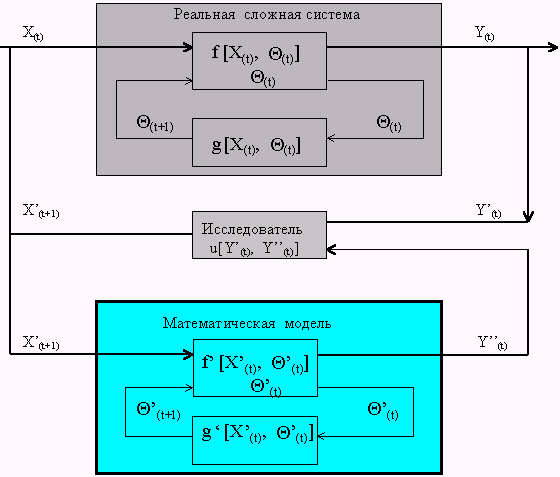
... воспринимаются даже на высоком научном уровне. Стремление упростить материал вряд ли целесообразно. Глава 3. Методические рекомендации курса «Математические основы моделирования 3D объектов» базового курса «компьютерное моделирование» для студентов педагогических ВУЗов специальности преподаватель информатики §1. Принципы построения электронного учебника Прежде чем рассмотреть ...
0 комментариев