Навигация
Выбор параметров контроля с использованием метода динамического программирования и метода ветвей и границ
25707
знаков
8
таблиц
1
изображение
Московский Авиационный Институт
(Технический Университет)
Кафедра 308
Курсовая работа
Выбор параметров контроля с использованием метода динамического программирования и метода ветвей и границ
Вариант II(2)
Выполниластудентка
группы КТ-515
Принял
Москва2008г.
Содержание
Задание
1. Метод динамического программирования
1.1 Теоретическая часть
2.2 Практическая часть
- ручной счёт
- листинг программы
2. Метод ветвей и границ
2.1 Теоретическая часть
2.2 Практическая часть
- ручной счёт
- листинг программы
Вывод
Литература
Задание
Вариант II(2)
Выбор параметров контроля с использованием метода динамического программирования и метода ветвей и границ при непересекающихся элементах объекта контроля и ограничениях по затратам на контроль С≤16.
Исходные данные: вероятность отказов элементов и затраты на контроль параметров.
Выбрать такие параметры, чтобы С≤16 при Q=Qmax.| N | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| Qi | 0.17 | 0.03 | 0.15 | 0.09 | 0.13 | 0.08 | 0.07 | 0.02 | 0.06 | 0.04 |
| с(xi) | 5 | 1 | 4 | 2 | 6 | 3 | 2 | 3 | 1 | 1 |
1. Метод динамического программирования
1.1 Теоретическая часть
Математически задачу выбора набора параметров из заданной их совокупности можно сформулировать следующим образом.
Пусть работоспособность объекта контроля характеризуется совокупностью n взаимосвязанных параметров, образующих множество S={x1, x2, …, xn}. Проверка всех параметров из S влечет контроль всех N элементов системы и дает однозначный ответ: объект исправен, если все N элементов исправны, или неисправен, если по крайней мере один из элементов отказал. Для " xi определено подмножество R(xi) элементов, проверяемых при контроле i-го параметра, причем предполагаем, что эти подмножества могут пересекаться, т.е. $ i, j: R(xi)ÇR(xj). Пусть W - некоторый набор параметров из множества S, т.е. WÍS. Тогда WÇW=Æ и WÈW=S. Значения xi из S можно представить булевым вектором, причем
xi= 1, если xiÎW,
0, если xiÎW.
Задача выбора параметров в этом случае формулируется двояко:
1) найти набор Ω, для которого
P(Ω)=max
при ∑xi·c(xi)≤C; iЄΩ
2) найти набор Ω, для которого
∑xi·c(xi)=min
при P(Ω)≥Pз,
где P(Ω) – апостериорная вероятность работоспособного состояния объекта контроля при положительном исходе контроля выбранных параметров WÍS; с(xi) – затраты на контроль i-го параметра; Рз – требуемая достоверность контроля; С – ограничение на общую стоимость контроля.
Значение P(Ω) зависит от принятых допущений и может быть найдено по формуле Байеса. Так, если предполагать в изделии наличие лишь одного отказа, то
P(Ω)=Р0/1-∑Рi,
iЄR(Ω)
где Р0=∏(1-рi) – априорная вероятность безотказной работы объекта:
iЄR(S)
Р0=1-∑Рi;
iЄR(S)
Рi- нормированная вероятность отказа системы из-за отказа i-го элемента: Рi=(pi/(1-pi))/(1+∑ pk/(1-pk); kЄR(S)pi – априорная вероятность отказа i-го элемента. Тогда вероятность того, что отказ будет обнаружен при проверке k-го параметра, можно вычислить по формуле:
Qk=∑Pk
kЄR(xk)
При возможности наличия в ОК произвольного числа отказов
P(Ω)=∏(1-pi)/∏(1-pi)
iЄR(S) iЄR(Ω)
Можно использовать простой перебор вариантов, однако возникающие при этом вычислительные трудности не позволяют сделать этого даже для простых систем (при n>10). В связи с этим комплектование набора будем трактовать как многошаговый процесс, состоящий из последовательного выбора отдельных параметров.
В соответствии с общим принципом оптимальности разобьем весь имеющийся ресурс стоимости С на С отрезков единичной длины. (В практических случаях заданные положительные величины с(xi) и С можно считать всегда целыми. Если это не так, то необходимо перейти к более мелким стоимостным единицам в зависимости от разрядности дробной части.). Рассмотрим наряду с интересующей нас исходной задачей множество аналогичных задач
f(Y)=max λ(x), Y Є [0,C],
xЄXY
где через XY обозначено множество неотрицательных целочисленных векторов Ω, отвечающих наборам, в которых общая стоимость проверки параметров не превосходит величины Υ.
Пусть Υ0=min c(xi).
i=1,…,n
Тогда при всех Υ Є [0,Υ0] соответствующие множества ΧΥ состоят, из одного нулевого элемента и f(Y)=0 для всех таких Υ. Для ресурса Υ Є [Υ0, С] согласно общей схеме динамического программирования справедливы следующие рекуррентные соотношения:
f(Yk)=max [Qi + f[Yk – c(xi)] – Gi (1)
iЄIY
где k=Y0, Y0+1, …, C; IY – множество тех i, для которых с(xi)≤Yk, начиная с номера k=max c(xi) уравнение (1) решается для всех i= 1,…,n;
Gi = ∑Pi – сумма вероятностей элементов i-го параметра, которые пересекаются с
IЄR(xi)∩Ωl*
элементами подмножества Ωl*, образованного на шаге Yk – c(xi).
Если " i, j; R(xi)∩R(xj)= Æ, то Gi=0 и
f(Yk)=max {Qi + f[Yk – c(xi)]} (2)
iЄIY
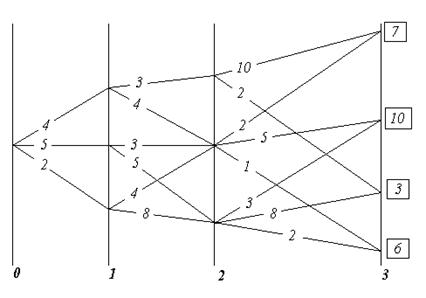
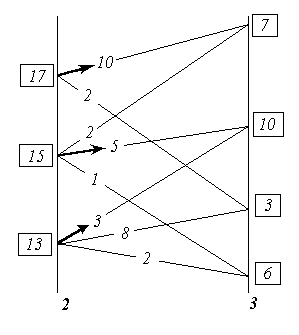
![]() Для решения интересующей нас задачи опишем простой численный метод, не требующий предварительного определения всех допустимых наборов и основанный на рекуррентных соотношениях (1). Для всех целых Υ = Υ0, С по формуле (1) вычисляются величины f(Yk) и при этом фиксируются индексы iYk*, на которых достигаются максимумы в (1). Искомый вектор Ω формируется последовательно включением в набор параметра iYkи подмножества Ωl*, зафиксированного на шаге Yk – c(xi). При этом, если YkЄ Ωl*, то на данном шаге этот параметр исключается из рассмотрения, так как каждый параметр может включаться в набор не более одного раза. Если на некотором ν-м шаге окажется, что f(Yν)< f(Yν-1), то в качестве Ων* принимается подмножество Ων-1* и фиксируется параметр iYν-1, причем за f(Yν)< принимается значение f(Yν-1). Заметим, что если в задаче P(Ω)=max при
Для решения интересующей нас задачи опишем простой численный метод, не требующий предварительного определения всех допустимых наборов и основанный на рекуррентных соотношениях (1). Для всех целых Υ = Υ0, С по формуле (1) вычисляются величины f(Yk) и при этом фиксируются индексы iYk*, на которых достигаются максимумы в (1). Искомый вектор Ω формируется последовательно включением в набор параметра iYkи подмножества Ωl*, зафиксированного на шаге Yk – c(xi). При этом, если YkЄ Ωl*, то на данном шаге этот параметр исключается из рассмотрения, так как каждый параметр может включаться в набор не более одного раза. Если на некотором ν-м шаге окажется, что f(Yν)< f(Yν-1), то в качестве Ων* принимается подмножество Ων-1* и фиксируется параметр iYν-1, причем за f(Yν)< принимается значение f(Yν-1). Заметим, что если в задаче P(Ω)=max при
∑xi·c(xi)≤C
iЄΩ
принять более жесткое ограничение, а именно ∑c(xi)=C, то последнее не допустимо, iЄΩ так как в этом случае max f(Yk) может быть меньше max f(Yk-1) из-за того, что он достигается на другом подмножестве параметров.
Общая сложность метода, очевидно, φ(n) ≤ c(n+1), т.е. экспоненциальная функция при переборе заменена линейной функцией. При этом для запоминания промежуточных значений необходимо k≤2c ячеек памяти. Если в качестве максимизируемого критерия использовать P(Ω)=∏(1-pi)/∏(1-pi), то необходимо решить задачу динамического iЄR(S) iЄR(Ω) программирования с мультипликативным критерием. Для этого достаточно прологарифмировать это выражение и обозначить
V=lgP(Ω)=lgР0-∑lg(1-pi). (3)
iЄR(Ω)
Так как выражение, стоящее под знаком ∑ в (3), отрицательно, то, V= Vmax тогда, когда максимальна величина суммы, т.е. в этом случае получим новую целевую функцию
V=∑νi, где νi=lg (1-pi),
iЄR(Ω)
обладающую свойством аддитивности и обращающуюся в максимум одновременно с P(Ω).
Похожие работы
... По теореме 9.3 в силу результатов шагов 3 и 8. (Шаг 10). Имеет место свойство (9.4) по теореме 9.5 в силу результатов шагов 1 и 9. Литература к лекции 9. 9.1. С.А. Абрамов. Элементы программирования. - М.: Наука, 1982. С. 85-94. 9.2. М. Зелковец, А. Шоу, Дж. Гэннон. Принципы разработки программного обеспечения. - М.: Мир, 1982. С. 98-105. Лекция 10. ТЕСТИРОВАНИЕ И ОТЛАДКА ПРОГРАММНОГО ...
... за собой её гибель, либо требующие подключения к процессу самоуправления суперсистемы иерархически высшего управления. Так соборный интеллект видится индивидуальному интеллекту с точки зрения достаточно общей теории управления; возможно, что кому-то всё это, высказанное о соборных интеллектах, представляется бредом, но обратитесь тогда к любому специалисту по вычислительной технике: примитивная ...
... данных будет нести больше смысла, если его отсортировать каким‑либо образом. Часто требуется сортировать данные несколькими различными способами. Во‑вторых, многие алгоритмы сортировки являются интересными примерами программирования. Они демонстрируют важные методы, такие как частичное упорядочение, рекурсия, слияние списков и хранение двоичных деревьев в массиве. Наконец, сортировка ...

... проектирования. Целью проекта является создание программного продукта (ПП), основанного на математическом пакете MatLab, реализующего математическую модель системы управления, построенной на основе оптимального закона, для системы слежения РЛС. Данный проект можно отнести к научно-исследовательской работе, которая принадлежит к типу прикладных, направленных на решение научных проблем с целью ...
0 комментариев