Навигация
Общее решение линейной однородной системы
38497
знаков
0
таблиц
12
изображений
2.7.2. Общее решение линейной однородной системы
Система (1) называется однородной, если fi(t)º0 (i=1, 2, …, n). Однородная система в векторной форме запишется в виде
![]() (3)
(3)
Совокупность S всех решений {x(t)} образует линейное пространство размерности n, так как решения этой системы являются линейно-независимыми и образуют базис. Любой элемент этого пространства представим в виде
![]() (4)
(4)
причем постоянные c1, c2, …, cn определяются однозначно. Отсюда следует, что любое решение данной системы может быть представлено в виде (4). Поэтому выражение (4) называется общим решением системы (3). Любая система из n линейно-независимых решений системы (3), образующая базис пространства S, называется фундаментальной системой решений.
2.7.3. Определитель Вронского. Формула Лиувилля
Пусть имеется некоторая система из n векторных функций
Тогда определителем Вронского, или вронскианом, называется определитель, составленный из компонент этих векторных функций. Таким образом, определитель Вронского имеет вид
Если система векторных функций x1(t), ..., хn(t) линейно-зависима, то определитель Вронского W(t)=0.
Пусть вектор-функции x1(t), ..., xn(t) представляют собой n решений системы (3). Тогда, если определитель Вронского W(t) для этих решений обращается в ноль в какой-нибудь точке t0Î[а, b], то W(t) тождественно равен нулю на всем отрезке [а, b].
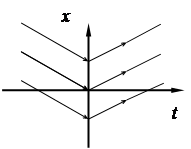
Пример: рассмотрим вектор-функции
![]()
Определитель Вронского для этих функций
![]()
При t = 0 W(0) = 0, но W(t) не равен тождественно 0. Отсюда следует, что данные вектор-функции х1(t) и x2(t) не могут быть решениями системы уравнений вида (3) с непрерывными коэффициентами, определенными на интервале, содержащем точку t=0.
Значение определителя Вронского в произвольной точке t можно вычислить с помощью рассмотренной ниже зависимости, называемой формулой Лиувилля.
Пусть x1(t), x2(t), ..., xn(t) — n решений системы (3). Тогда между значениями определителя Вронского W(t) в точках t0 и t существует следующая зависимость:
![]()
![]()
– след матрицы A(t).
2.7.4. Линейная неоднородная система. Метод вариации произвольных постоянных
Рассмотрим линейную неоднородную систему (2)
![]()
Соответствующая ей однородная система (3)
![]()
Пусть x=y(t) и j(t) – два решения системы (2). Тогда разность
x(t)= y(t)–j(t)
Представляет собой решение однородной системы (3).
Общее решение системы (2) имеет вид
![]()
где ci – произвольные постоянные; xi(t) (i=1, 2, …, n) – фундаментальная система решений системы (3).
Частное решение системы (2) может быть найдено методом вариации произвольных постоянных. Рассмотрим этот метод. Пусть x1(t), x2(t), …, xn(t)— фундаментальная система решений системы (3). Частное решение неоднородной системы (2) будем искать в виде
полагая, что ci являются не постоянными, а некоторыми функциями t. Подставим это решение в систему (2):
![]()
Так как вектор-функции xi(t) – являются решениями однородной системы (3), то
![]()
поэтому
![]()
Это выражение представляет собой систему линейных алгебраических уравнений относительно сi(t) (i=l, 2, ,..., n). Определитель этой системы уравнений есть определитель Вронского для фундаментальной системы решений. Он отличен от нуля, поэтому эта система имеет единственное решение сi’(t)=Фi(t) (i=l, 2,..., n).
Интегрируем полученные равенства:
![]()
Следовательно, искомое частное решение имеет вид
![]()
Значит, общее решение неоднородной системы будет
![]()
Похожие работы
... . , т.е. таких уравнений, у которых правая часть не является ненпрерывной по x функций рассмотрены в статье [5]. Теория систем автоматического управления, описываемых дифференциальными уравнениями с разрывными правыми частями рассматривается в книгах [13, 14, 15]. В работе С.В. Емельянова [13] излагается один из разделов теории автоматичесеого управления – теория систем с переменной структурой, ...
... популяции обязательно вырождаются, причем независимо от начального распределения особей по возрасту. В завершение рассмотрим пример. Одной из классических моделей динамики популяций является так называемая логистическая модель или модель Ферхюльста, которая описывается дифференциальным уравнением с начальным условием , где , см., например, [5, c. 14]. Если учитывать ограниченность времени жизни ...
... в руки инженера эффективную вычислительную процедуру решения задачи оптимизации управления, хорошо приспособленную к использованию ЭВМ. Этот метод мы рассмотрим более подробно. 2.4. Метод динамического программирования 2.4.1. Дискретная форма вариационной задачи Преодоление рассмотренных трудностей решения вариационной задачи лежит на путях использования эффективных вычислительных методов ...


... - α) / (2 + α)) yk - 1 + (α/ (2 + α)) (xk + xk - 1). (9) В лабораторной работе производится оценка ошибок цифрового моделирования для каждого из этих методов. Моделирование линейных замкнутых систем Нужно быть очень внимательным при выборе интервала дискретизации, когда моделируются замкнутые системы. В этих системах текущее значение входного процесса сравнивается со ...
0 комментариев