Навигация
Диаграмма движения толкателя
17236
знаков
5
таблиц
10
изображений
4.1 Диаграмма движения толкателя
По заданному графику скорости толкателя v(t) графическим диффириенцированием по методу хорд получаем ускорение толкателя а=f(t), а графическим интегрированием по методу хорд получаем перемещения толкателя s=f(t).
Базы интегрирования Н1=20мм; Н2=30 мм.
Графики υ(s), a(s), a(υ) получаю методом исключения общего переменного параметра t.
Масштабные коэффициенты диаграмм:
Масштабный коэффициент перемещения:
![]()
Масштабный коэффициент времени:
![]()
![]()
![]()
Масштабный коэффициент скоростей:
![]()
Масштабный коэффициент ускорений:
![]()
4.2 Выбор минимального радиуса кулачка
Минимальный радиус кулачка выбираю из условия выпуклости кулачка. Для этого необходимо, чтобы минимальный радиус был больше ил равен максимальному значению аналога ускорения в отрицательной части графика:
![]()
Где ![]() считаем:
считаем:
![]()
![]()
![]()
![]()
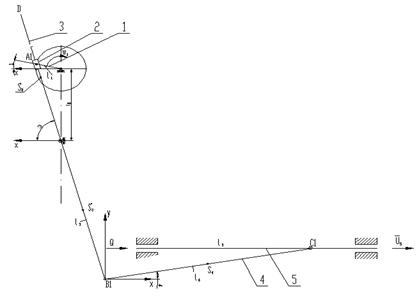
4.3 Построение профиля кулачка
Построение профиля кулачка произвожу методом обращённого движения.
Масштабный коэффициент построения:
![]()
В выбранном масштабе строю окружность радиуса ![]() . Откладываю фазовый рабочий угол
. Откладываю фазовый рабочий угол ![]() . Делю этот угол на 13 частей. Через точки деления провожу оси толкателя в обращённом движении. Для этого соединяю точку деления с центром вращения кулачка. Вдоль осей толкателя от окружности минимального радиуса откладываю текущие перемещения толкателя в выбранном масштабе. Через полученные точки провожу тарелки перпендикулярные осям толкателя. Кривая, огибающая все положения тарелок, является профилем кулачка.
. Делю этот угол на 13 частей. Через точки деления провожу оси толкателя в обращённом движении. Для этого соединяю точку деления с центром вращения кулачка. Вдоль осей толкателя от окружности минимального радиуса откладываю текущие перемещения толкателя в выбранном масштабе. Через полученные точки провожу тарелки перпендикулярные осям толкателя. Кривая, огибающая все положения тарелок, является профилем кулачка.
4.4 Максимальное значение скорости и ускорения толкателя
![]()
![]()
4.4.1 Расчёт кулачка на ЭВМ
Public Sub kul()
Dim I As Integer
Dim dis1, dis2, R, a1, a2, arksin1, arksin2, BETTA, BET As Single
Dim R0, FIR, FI0, FII, SHAG, E As Single
Dim S(1 To 36) As Single
R0 = InputBox("ВВЕДИТЕ МИНИМАЛЬНЫЙ РАДИУС КУЛАЧКА RO")
FIR = InputBox("ВВЕДИТЕ РАБОЧИЙ УГОЛ КУЛАЧКА FIR")
FI0 = InputBox("ВВЕДИТЕ НАЧАЛЬНОЕ ЗНАЧЕНИЕ УГЛА ПОВОРОТА КУЛАЧКА FI0")
E = InputBox("ВВЕДИТЕ ДЕЗАКСИАЛ E")
For I = 1 To 36
S(I) = InputBox("ВВЕДИТЕ СТРОКУ ПЕРЕМЕЩЕНИЙ S(" & I & ")")
Next I
FIR = FIR * 0.0174532
SHAG = FIR / 13
FI0 = FI0 * 0.0174532
FII = FI0
For I = 1 To 36
dis1 = (R0 ^ 2 - E ^ 2) ^ (1 / 2)
dis2 = S(I) ^ 2 + R0 ^ 2 + 2 * S(I) * dis1
R = dis2 ^ (1 / 2)
a1 = E / R
a2 = E / R0
arksin1 = Atn(a1 / (1 - a1 ^ 2) ^ (1 / 2))
arksin2 = Atn(a1 / (1 - a2 ^ 2) ^ (1 / 2))
BETTA = FII + arksin1 - arksin2
BETTA = BETTA * 180 / 3.1415
Worksheets(1).Cells(I, 1) = R
Worksheets(1).Cells(I, 2) = BETTA
FII = FII + SHAG
Next I
End Sub
Таблица- Результаты расчета
| 52 | 20,00048 |
| 60 | 40,00097 |
| 73 | 60,00145 |
| 86 | 80,00194 |
| 94 | 100,0024 |
| 98 | 120,0029 |
| 94 | 140,0034 |
| 86 | 160,0039 |
| 73 | 180,0044 |
| 60 | 200,0048 |
| 52 | 220,0053 |
| 48 | 240,0058 |
| 48 | 260,0063 |
| 48 | 280,0068 |
| 48 | 300,0073 |
| 48 | 320,0077 |
| 48 | 340,0082 |
| 48 | 360,0087 |
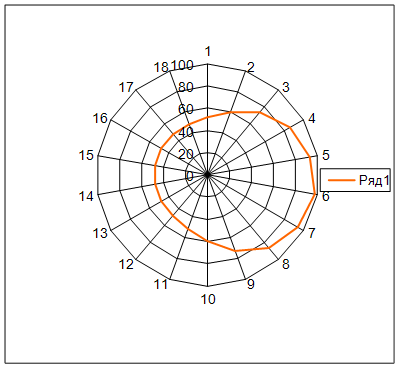
Рис.8 – График построения кулачка
Список используемых источников
1 А. А. Машков, Теория механизмов и машин. – Машиностроение, г. Москва, 1969г. – 583.
2 С. Н. Кожевников, Теория механизмов и машин. – Машиностроение, г. Москва, 1969г. – 583с.
3 А. С. Кореняко, Курсовое проектирование по теории механизмов и машин. Высшая школа, Киев, 1970г. – 330с.
4 И. П. Филонов, Теория механизмов и машин и манипуляторов. – Дизайн ПРО, г. Минск, 1998г. – 428с.
5 И. И. Артоболевский, Теория механизмов и машин. – Наука, г. Москва, 1998г. – 720с.
6 К. В. Фролов, Теория механизмов и машин. – Высшая школа, г. Москва, 1998г. – 494с.
Похожие работы
... на VBA Ускорения Величина ускорения, м/с^2 0 1 2 3 4 5 6 7 8 9 10 11 12 Расчётные 4.4 2.54 1,50 -0,351 -0.99 -1.19 -3,80 -3.91 -6.8 -6.31 1,28 6.99 4.4 Графические 4.36 2.41 1,60 -0.324 -0.96 -1.09 -3,90 -3.88 -6.7 -6.161 1,30 6.924 4.36 2. Силовой анализ механизма Исходные данные: масса кулисы ; масса шатуна ; масса ползуна . сила полезного ...





... расчет На рисунке 25 представлен результат термодеформационного расчета. Рисунок 25 – Контурное представление результата термодеформационного расчета 5. Расчет экономического эффекта от модернизации поперечно – строгального станка мод. 7307 5.1 Исходные данные для расчета экономического эффекта от модернизации Проведенная модернизация поперечно-строгального станка мод. 7307 ...
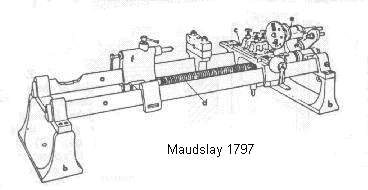
... канавок, отрезки и других работ, которые могут быть выполнены перемещением поперечного суппорта, а также кронштейн 3 с щитком 4, защищающим рабочего от попадания стружки и смазочно-охлаждающей жидкости. Токарный станок имеет весьма древнюю историю, причем с годами его конструкция менялась очень незначительно. Приводя во вращение кусок дерева, мастер с помощью долота мог придать ему самую ...
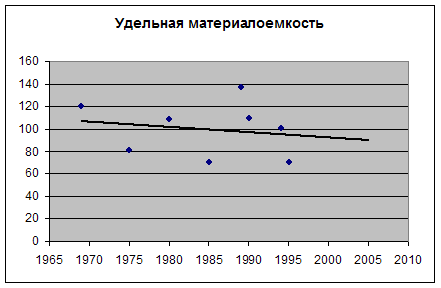
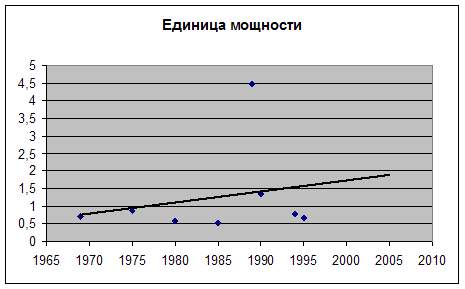
... . С определенной долей вероятности мы можем утверждать, что значение критерия снизится и составит 90 кг/мм. Полученная кривая свидетельствует об очевидном росте единицы мощности, приходящейся на единицу массы зубострогального станка. Прибегая к помощи метода аппроксимации, можно предположить возможное значение данного параметра в 2005 году, которое составит 1,9 Вт/кг. С помощью метода ...
0 комментариев