Навигация
КУРСОВОЙ ПРОЕКТ
1.2 Структурный анализ зубчатого механизма
2.2 Определение приведённого момента инерции звеньев
2.3 Определение приведённого момента сопротивления



на тему: «Механизмы компрессора»
1. Структурный анализ механизмов
1.1 Структурный анализ рычажного механизма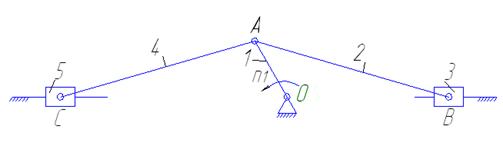
Рисунок 1.1. Подвижные звенья механизма
1-кривошип
2-шатун
3-ползун
4-шатун
5-ползун
Кинематические пары.
О (0-1),вр.,5 кл.
А (1-4),вр.,5 кл.
А'(1-2),вр.,5 кл.
В (2-3),вр.,5 кл.
В'(3-0),пост.,5 кл.
С (4-5),вр.,5 кл.
С'(5-0),пост.,5 кл.
Найдём число степеней свободы.
Запишем формулу Чебышева.
W=3∙n-2∙P5-P4 (1.1)
Где, W-число степеней свободы,
n-число подвижных звеньев,
P4 - число пар 4-го класса,
P5 - число пар 5-го класса.
W=3∙5-2∙7=1
Число степеней свободы рычажного механизма равно 1.
Разобьём механизм на группы Асура и рассмотрим каждую группу в отдельности.
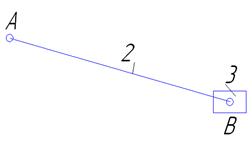 Группа 2-3 (Рисунок 1.2)
Группа 2-3 (Рисунок 1.2)
A'(1-2)-внешняя
B'(3-0)-внешняя
B (2-3)-внутренняя
W=3∙2-2∙3=0
II кл. 2 вид Рисунок 1.2
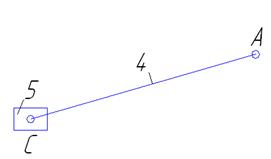 Группа 4-5 (Рисунок 1.3)
Группа 4-5 (Рисунок 1.3)
А (1-4)-внешняя
С' (5-0)-внешняя
C (4-5)-внутренняя
W=3∙2-2∙3=0
II кл. 2 вид
O (0-1)
W=3-2=1
Рисунок 1.4
Составим структурную формулу: ![]()
Механизм является механизмом 2кл.,2в..
1.2 Структурный анализ зубчатого механизма
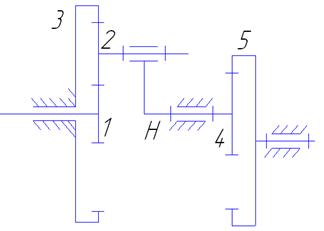
Рисунок 1.5. Подвижные звенья механизма
1 – центральное колесо
2 – сателлит
3 – зубчатое колесо
H – водило
4 – зубчатое колесо
5 – зубчатое колесо
Кинематические пары.
(1-0),вр.,5 кл.
(5-0),вр.,5 кл.
(2-H),вр.,5 кл.
(4-0),вр.,5 кл.
(1-2),вр.,4 кл.
(2-3),вр.,4 кл.
(4-5),вр.,4 кл.
Найдём число степеней свободы.
Исходя из формулы Чебышева имеем,
W=3∙4-2∙4-3=1
Число степеней свободы зубчатого механизма равно 1, следовательно, данный механизм является планетарным.
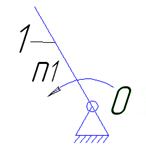
1.3 Структурный анализ кулачкового механизма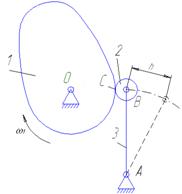
Рисунок 1.6. Подвижные звенья механизма
1-кулачок
2-ролик
3-коромысло
Кинематические пары.
О (1-0),вр.,5 кл.
А (3-0),вр.,5 кл.
В (2-3),вр.,5 кл.
С (1-2),пост.,4 кл.
Найдём число степеней свободы.
W=3∙n-2∙P5-P4
W=3∙3-2∙3-1=2
Число степеней свободы равно 2.
Так как W≠1, то присутствует лишнее звено - ролик.
2. Динамический анализ рычажного механизма
2.1 Определение скоростейДля заданной схемы механизма строим 12 положений.
Определяем масштабный коэффициент построения механизма:
![]() (2.1)
(2.1)
где,![]() - масштабный коэффициент,
- масштабный коэффициент, ![]()
![]() - длина звена,
- длина звена, ![]()
![]() - длина звена на чертеже,
- длина звена на чертеже, ![]()
![]()
![]()
Запишем длинны звеньев механизма на чертеже
![]()
![]()
![]()
![]()
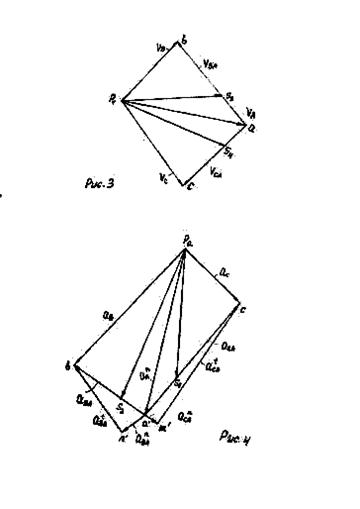
Приступаем к построению повёрнутых планов скоростей для каждого положения. Рассмотрим пример построения для положения №5:
У кривошипа определяем скорость точки А
![]() (2.2)
(2.2)
где, ![]() - длина звена,
- длина звена, ![]()
![]() - угловая скорость кривошипа,
- угловая скорость кривошипа, ![]()
![]()
![]()
![]()
![]()
Для построения вектора скорости точки А определяем масштабный коэффициент
![]() (2.3)
(2.3)
где, ![]() - скорость точки А,
- скорость точки А, ![]()
![]() - вектор скорости точки А,
- вектор скорости точки А, ![]()
![]() - полюс, выбираемый произвольно
- полюс, выбираемый произвольно
![]()
![]()
Для определения скорости точки B запишем систему уравнений:
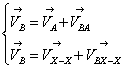 (2.4)
(2.4)
![]()
![]()
![]() - из задания
- из задания
Для определения скорости центра масс 2-го звена S2 воспользуемся соотношением:
![]() (2.5)
(2.5)
где, ![]() ,
, ![]() - расстояния между соответствующими точками на механизме, м
- расстояния между соответствующими точками на механизме, м
![]() ,
, ![]() - длинны векторов скоростей на плане, мм
- длинны векторов скоростей на плане, мм
![]() мм
мм
Соединив, точку ![]() и π получим скорость центра масс второго звена.
и π получим скорость центра масс второго звена.
![]()
![]()
Для определения скорости точки C запишем систему уравнениё:
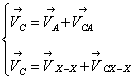 (2.6)
(2.6)
![]()
![]()
![]() - из задания
- из задания
Для определения скорости центра масс 4-го звена S4 воспользуемся соотношением:
![]() (2.7)
(2.7)
где, ![]() ,
, ![]() - расстояния между соответствующими точками на механизме, м
- расстояния между соответствующими точками на механизме, м
![]() ,
, ![]() - длинны векторов скоростей на плане, мм
- длинны векторов скоростей на плане, мм
![]() мм
мм
Соединив, точку ![]() и π получим скорость центра масс второго звена.
и π получим скорость центра масс второго звена.
![]()
![]()
Определим значения угловых скоростей звеньев.
![]()
![]()
![]()
![]()
Направление ![]() определяем, перенеся вектор ab в точку S2 – второе звено вращается против часовой стрелки. Аналогично получим, что
определяем, перенеся вектор ab в точку S2 – второе звено вращается против часовой стрелки. Аналогично получим, что ![]() направлена по часовой стрелке.
направлена по часовой стрелке.
Скорости точек остальных положений определяются аналогичным образом. Все значения сводим в таблицу(2.1).
Таблица 2.1 – Значения линейных и угловых скоростей
| N положения | VB=VS3,
| VS2,
| VС=VS5,
| VS4,
| VBA= VCA,
|
|
| 1 | 0 | 5,58 | 0 | 5,58 | 8,37 | 33,48 |
| 2 | 5,36 | 6,66 | 3,01 | 6,14 | 7,34 | 29,37 |
| 3 | 8,46 | 8,14 | 6,04 | 7,39 | 4,36 | 17,42 |
| 4 | 8,37 | 8,37 | 8,37 | 8,37 | 0 | 0 |
| 5 | 6,04 | 7,39 | 8,46 | 8,14 | 4,36 | 17,42 |
| 6 | 3,01 | 6,14 | 5,36 | 6,66 | 7,34 | 29,37 |
| 7 | 0 | 5,58 | 0 | 5,58 | 8,37 | 33,48 |
| 8 | 3,01 | 6,14 | 5,36 | 6,66 | 7,34 | 29,37 |
| 9 | 6,04 | 7,39 | 8,46 | 8,14 | 4,36 | 17,42 |
| 10 | 8,37 | 8,37 | 8,37 | 8,37 | 0 | 0 |
| 11 | 8,46 | 8,14 | 6,04 | 7,39 | 4,36 | 17,42 |
| 12 | 5,36 | 6,66 | 3,01 | 6,14 | 7,34 | 29,37 |
Приведённый момент инерции определяется по формуле:
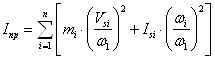 (2.8)
(2.8)
где, ![]() - масса i-го звена рычажного механизма, кг
- масса i-го звена рычажного механизма, кг
![]() - линейная скорость центра масс i-го звена,
- линейная скорость центра масс i-го звена,![]()
![]() - угловая скорость i-го звена,
- угловая скорость i-го звена, ![]()
![]() - приведённый момент инерции i-го звена по отношению к центру масс
- приведённый момент инерции i-го звена по отношению к центру масс
![]() (2.9)
(2.9)
 - для звена, совершающего сложное движение
- для звена, совершающего сложное движение
 - для звена, совершающего вращательное или колебательное движения
- для звена, совершающего вращательное или колебательное движения
 - для звена, совершающего поступательное движение
- для звена, совершающего поступательное движение
Запишем формулу для нашего механизма:
 (2.10)
(2.10)
Для 5-го положения приведём расчёт, а для остальных положений сведём значение![]() в таблицу 2.2
в таблицу 2.2
![]() кг∙м2
кг∙м2
![]() кг∙м2
кг∙м2
![]() кг∙м2
кг∙м2
Записав формулу (2.11) для положения №5 и подставив известные величины, получим:

Таблица 2.2 – Приведённые моменты инерции
| N положения |
| N положения |
|
| 1 | 0,0592 | 7 | 0,0592 |
| 2 | 0,0886 | 8 | 0,0886 |
| 3 | 0,1441 | 9 | 0,1441 |
| 4 | 0,1701 | 10 | 0,1701 |
| 5 | 0,1441 | 11 | 0,1441 |
| 6 | 0,0886 | 12 | 0,0886 |
Для построения графика приведённого момента инерции необходимо Рассчитать масштабные коэффициенты.
 ,
, ![]() (2.11)
(2.11)
где, ![]() - масштабный коэффициент по оси
- масштабный коэффициент по оси ![]()
![]() - максимальное значение
- максимальное значение ![]() , кг∙м2
, кг∙м2
![]() - значение
- значение ![]() на графике, мм
на графике, мм
![]()
![]()
![]() ,
,![]() (2.12)
(2.12)
где, ![]() - масштабный коэффициент по оси φ
- масштабный коэффициент по оси φ
![]() - принятая длинна одного оборота по оси φ
- принятая длинна одного оборота по оси φ
![]()
![]()
2.3 Определение приведённого момента сопротивления
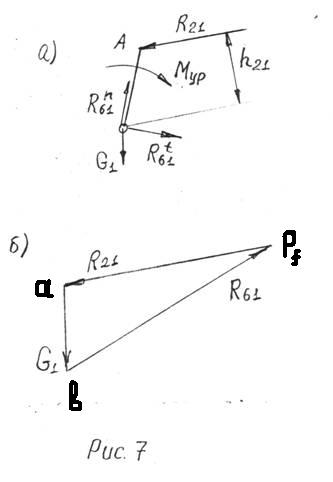
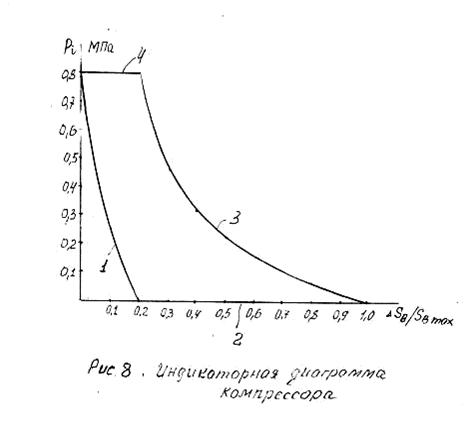
Определим максимальную силу![]() , которая действует на ползун В по следующей формуле:
, которая действует на ползун В по следующей формуле:
![]() (2.13)
(2.13)
где, ![]() - Максимальное индикаторное давление,
- Максимальное индикаторное давление, ![]()
![]() - диаметр поршня,
- диаметр поршня, ![]()
![]()
![]()
Определим расстояние от оси ![]() до графика по формуле (2.14)
до графика по формуле (2.14)
![]()
![]()
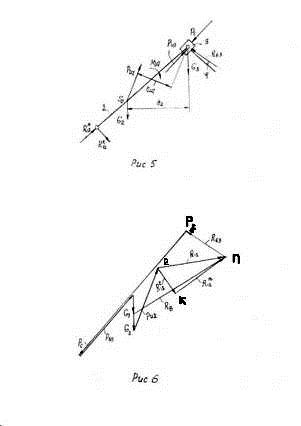
На планах скоростей прикладываем все силы, действующие на механизм, и указываем их плечи. Составляем сумму моментов относительно полюса и решаем уравнение.
Для 1-го положения:
![]()
![]() (2.14)
(2.14)
где, ![]() плечи соответствующих сил, снятые с плана скоростей, мм.
плечи соответствующих сил, снятые с плана скоростей, мм.
![]() H,
H,
![]() , во всех положениях
, во всех положениях
![]() H
H
Находим момент привидения:
![]() (2.15)
(2.15)
где, ![]() - приведённая сила, Н
- приведённая сила, Н
![]() - длина соответствующего звена, м
- длина соответствующего звена, м
![]() Н∙м
Н∙м
Для 2-го положения:
![]()
![]()
![]() H
H
![]() Н∙м
Н∙м
Для 3-го положения:
![]()
![]()
![]() H
H
![]() Н∙м
Н∙м
Для 4-го положения:
![]()
![]()
![]() H
H
![]() Н∙м
Н∙м
Для 5-го положения:
![]()
![]()
![]() H
H
![]() Н∙м
Н∙м
Для 6-го положения:
![]()
![]()
![]() H
H
![]() Н∙м
Н∙м
Для 7-го положения:
![]()
![]()
![]() H
H
![]() Н∙м
Н∙м
Для 8-го положения:
![]()
![]()
![]() H
H
![]() Н∙м
Н∙м
Для 9-го положения:
![]()
![]()
![]() H
H
![]() Н∙м
Н∙м
Для 10-го положения:
![]()
![]()
![]() H
H
![]() Н∙м
Н∙м
Для 11-го положения:
![]()
![]()
![]() H
H
![]() Н∙м
Н∙м
Для 12-го положения:
![]()
![]()
![]() H
H
![]() Н∙м
Н∙м
Все значения сводим в таблицу.
Таблица 2.4 – Приведённые моменты сопротивления
| N положения |
| N положения |
|
| 1 | 8,88 | 7 | 8,88 |
| 2 | 650,08 | 8 | 634,72 |
| 3 | 180,7 | 9 | 171,81 |
| 4 | 681,01 | 10 | 681,01 |
| 5 | 1665,43 | 11 | 1674,32 |
| 6 | 1242,3 | 12 | 1257,69 |
Определяем масштабный коэффициент построения графика моментов сопротивления:
 ,
, ![]() (2.16)
(2.16)
где, ![]() - масштабный коэффициент по оси
- масштабный коэффициент по оси ![]()
![]() - максимальное значение
- максимальное значение ![]() ,
, ![]()
![]() - значение
- значение ![]() на графике, мм
на графике, мм
![]()
![]()
По данным расчёта строится график ![]() .
.
Путём графического интегрирования графика приведённого момента строится график работ сил сопротивления ![]() .
.
График работ движущих сил ![]() получаем в виде прямой, соединяющей начало и конец графика работ сил сопротивления.
получаем в виде прямой, соединяющей начало и конец графика работ сил сопротивления.
Масштабный коэффициент графика работ:
![]() ,
,![]() (2.17)
(2.17)
где, Н – полюсное расстояние для графического интегрирования, мм
Н=60мм
![]()
![]()
Момент движущий ![]() является величиной постоянной и определяется графически.
является величиной постоянной и определяется графически.
![]()
![]()
Путём вычитания ординат графика ![]() из соответствующих ординат
из соответствующих ординат ![]() строится график изменения кинетической энергии
строится график изменения кинетической энергии ![]() .
.
![]() (2.18)
(2.18)
![]()
![]()
По методу Ф. Витенбауэра на основании ранее построенных графиков![]() и
и ![]() строим диаграмму энергия-масса
строим диаграмму энергия-масса ![]() .
.
Определяем углы ![]() и
и ![]() под которыми к диаграмме энергия-масса, проводятся касательные.
под которыми к диаграмме энергия-масса, проводятся касательные.
![]() (2.19)
(2.19)
![]() (2.20)
(2.20)
где, ![]() - коэффициент неравномерности вращения кривошипа.
- коэффициент неравномерности вращения кривошипа.
![]()
![]()
![]()
![]()
![]()
Из чертежа определим ![]()
![]()
![]()
Определяем момент инерции маховика
![]() ,
,![]() (2.21)
(2.21)
![]()
![]()
Маховик устанавливается на валу звена приведения.
Определим основные параметры маховика.
![]() ,кг (2,22)
,кг (2,22)
где, ![]() - масса маховика, кг
- масса маховика, кг
![]() - плотность материала,
- плотность материала, ![]() (материал-Сталь 45)
(материал-Сталь 45)
![]() - ширина маховика, м
- ширина маховика, м
![]() - диаметр маховика, м
- диаметр маховика, м
 ,м (2,23)
,м (2,23)
где, ![]() - коэффициент (0,1÷0,3),
- коэффициент (0,1÷0,3), ![]()
![]() м
м
![]() м
м
![]() кг
кг
Похожие работы
... отрезка "ав". Соединив точки S2 и S4 с полюсом плана скоростей получим векторы скоростей этих точек, а величина скоростей определится из соотношений: . Построенный план скоростей для механизма компрессора позволяет определить угловые скорости звеньев 2 и 4 в их вращательном движении. Как уже говорилось, отрезок плана скоростей ав (вектор) обозначает скорость точки "В" относительно точки ...
... (м); lав=lас== (м); Так как механизм находится в 5 положении, то, деля окружность на 12 частей, т.е. на каждую часть приходится по 30, задаём нужное положение. 2. Киниматическое исследование механизма компрессора 2.1 Построение плана скоростей для заданного 5-го положения. , угловая скорость коленчатого вала , где мин-1 – частота вращения коленчатого вала. ; ; ...
... .335 с., ил. Организационно-экономический расчёт.Консультант: Одинцова Л. А. Исследовательская часть. Охрана труда и охрана окружающей среды. В данном проекте спроектирован цех для ремонта поршневых компрессоров. Основной материал обработки серый чугун марок СЧ 21, 24 ГОСТ 1412-79. Для ремонта компрессоров применяется различное оборудование: токарные, круглошлифовальные, плоскошлифовальные, ...
... "Инструкции по эксплуатации поршневого компрессора". Типичные повреждения и неисправности и указания по их устранению Признаки Причины Способ устранения Другие ненатуральные шумы компрессора а) сильный перегрев, вызывающий заклинивание поршня а) снять и очистить поршень и зеркало цилиндра, проверить качество используемого масла Повышенное давление на выходе или на входе может ...
0 комментариев