Навигация
Проектирование механизмов двухцилиндрового четырехтактного двигателя внутреннего сгорания
15808
знаков
2
таблицы
0
изображений
СОДЕРЖАНИЕ
Введение
1. Динамический анализ рычажного механизма по коэффициенту неравномерности движения (графическая часть – лист №1)
2. Силовое исследование рычажного механизма (графическая часть – лист №2).
3. Проектирование зубчатой передачи и планетарного редуктора (графическая часть – лист №3)
4. Проектирование кулачкового механизма (графическая часть – лист №4)
Список использованной литературы
ВВЕДЕНИЕ
Научной основой создания новых высокоэффективных, надежных машин и приборов и технологических линий является теория механизмов и машин – наука об общих методах исследования и проектирования.
В свете задач, стоящих перед машиностроительной промышленностью, особое значение приобретает качество подготовки высококвалифицированных инженеров. Современный инженер-конструктор должен владеть современными методами расчета и конструирования новых быстроходных автоматизированных и быстроходных машин. Рационально спроектированная машина должна удовлетворять социальным требованиям – безопасности обслуживания и создания наилучших условий для обслуживающего персонала, а также эксплуатационным, технологическим и производственным требованиям. Эти требования представляют собой сложный комплекс задач, которые должны быть решены в процессе проектирования новой машины.
Решение этих задач на начальной стадии проектирования состоит в выполнении анализа и синтеза проектируемой машины, а также в разработке ее кинематической схемы, обеспечивающей с достаточным приближением воспроизведение требуемого закона движения.
Для выполнения этих задач студент – будущий инженер – должен изучить основные положения теории механизмов и общие методы кинематического и динамического анализа и синтеза механизмов, а также приобрести навыки в применении этих методов к исследованию и проектированию кинематических схем механизмов и машин различных типов.
Поэтому наряду с изучением курса теории механизмов и машин в учебных планах предусматривается обязательное выполнение студентами курсового проекта по теории механизмов и машин. Проект содержит задачи по исследованию и проектированию машин, состоящих из сложных и простых в структурном отношении механизмов (шарнирно-рычажных, кулачковых, зубчатых и т.д.). Курсовое проектирование способствует закреплению, углублению и обобщению теоретических знаний, а также применению этих знаний к комплексному решению конкретной инженерной задачи по исследованию и расчету механизмов и машин; оно развивает у студента творческую инициативу и самостоятельность, повышает его интерес к изучению дисциплины и прививает навыки научно-исследовательской работы.
В данном курсовом проекте рассмотрены механизмы двухцилиндрового четырехтактного двигателя внутреннего сгорания, такие как:
- рычажный механизм;
- планетарная ступень коробки передач;
- простая зубчатая передача;
- кулачковый механизм с толкателем.
I Динамический синтез рычажного механизма по коэффициенту неравномерности движения (графическая часть – лист № 1)
1.1 Построение планов положений для 12 положений ведущего звена и соответствующих им планов скоростей:
Планы положений:
Масштаб планов положений μl = lOA / (OA) = 0,305 / 180 = 0,00169 м/мм.
Планы скоростей:
U1P= UZ*Z** · UNH;
U1P = n1 / nP ;
n1 = nP · U1P ;
UZ*Z** = Z** / Z* = 30 / 17 = 1,76 ;
UNH = 5,1;
U1P = 1,76 · 5.1 = 9 ;
n1 = 240 · 9 = 2160 об/мин – частота вращения кривошипа 1.
Для каждого из 12 планов положений строится план скоростей.
Скорость точки В, VВ![]() (АВ):
(АВ):
VВ = ω1 lАВ = 226,08 0,0825 = 18,65 м/с,
где ![]() рад/с – угловая скорость вращения кривошипа 1.
рад/с – угловая скорость вращения кривошипа 1.
Скорость точки С определим, решая графически систему векторных уравнений:
гдеVСВ – скорость движения точки С относительно точки В, VСВ^СВ;
VС0 = 0 м/с – скорость точки С0, лежащей на стойке;
VСС0 – скорость движения точки С относительно точки С0, VСС0÷÷OХ.
Скорость точки D определяется из пропорции:
![]() , VD
, VD![]() (DВ):
(DВ):
Угловая скорость вращения шатуна 2:
![]() , рад/с.
, рад/с.
Для определения скорости точки E графически решается система уравнений
где VED – скорость движения точки E относительно точки D, VED^ ED;
VE0 = 0 м/с – скорость точки E0, лежащей на стойке;
VEE0 – скорость движения точки E относительно точки E0, VEE0÷÷ OY.
Угловая скорость вращения шатуна 4:
![]() , рад/с.
, рад/с.
Масштаб планов скоростей μV = VB / (pв) = 18,65 / 50 = 0,373 м∙c–1/мм.
1.2 Построение графика приведенного к ведущему звену момента инерции механизма в зависимости от угла поворота звена приведения для цикла установившегося движения
Приведенный момент инерции для каждого положения механизма определяется по формуле, [1], стр.337:
где m2, m3, m4 и m5 – соответственно массы звеньев 2, 3, 4 и 5, кг;
JS1, JS2, JS4 – моменты инерции звеньев 1, 2 и 4, кг∙м2;
VS2, VS4 – скорости центров масс звеньев 2 и 4, м/с.
Результаты расчетов занесены в таблицу 1:
табл. 1
| Положение | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| JП, кг∙м2 | 0,03 | 0,034 | 0,041 | 0,042 | 0,038 | 0,023 | 0,038 | 0,042 | 0,041 | 0,034 | 0,03 | 0,027 |
Масштабные коэффициенты построения графика:
μJ = JПMAX / yMAX = 0,042 / 80 = 0,000525 кг∙м2/мм;
μφ =2 ∙ π / L = 2 ∙ 3,14 / 180 = 0,0349 рад/мм.
Ось ординат направим горизонтально, т.е. строим график повернутым на 90˚.
Похожие работы
... тока построил в 1841 году английский электротехник Чарльз Уитстон (1802 - 1875). Синхронный двигатель не получил достаточно широкого распространения. Подлинная революция произошла после изобретения асинхронного (индукционного) двигателя. Первый асинхронный двухфазный двигатель в 1888 году сконструировал американский изобретатель (по происхождению серб) в области электро- и радиотехники Тесла ( ...

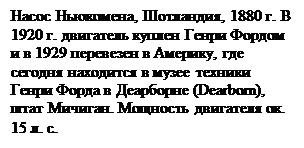
... в минуту, эффективность (к.п.д.) 26.2 %. при весе пять тонн. Это намного превосходило существующие двигатели Отто с к.п.д. 20 % и судовые паровые турбины с к.п.д. 12 %, что вызвало немедленный интерес промышленности. Существенным недостатком первых дизелей являлась невозможность реверсирования (изменения направления вращения), затруднявшая их использование на водном транспорте. Первый судовой ...
варов. В виде пленки его широко используют для упаковки различных товаров, в сельском хозяйстве и строительстве. Приборы для окон и дверей. Приборы для окон и дверей по назначению подразделяют на приборы установочные, запорные и замки. Каждый вид приборов и приспособлений подразделяют по материалу, назначению, способу изготовления, способу крепления, конструкции, наличию дополнительных ...

... мельницы. Дата изобретения и автор мельничного регулятора неизвестены. В 1787 г. Уатт адаптировал существующий центробежный регулятор под паровую машину, создав более совершенную конструкцию, названную для отличия от прототипа - регулятором Уатта. Особое место в истории техники регулятор Уатта занял благодаря тому, что именно его конструкция легла в основу теории и практики регуляторостроения, ...
0 комментариев