Навигация
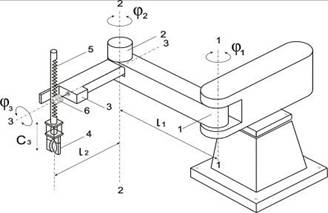
Проектирование механической системы промышленного робота манипулятора
12708
знаков
2
таблицы
8
изображений
Факультет экономики и управления в машиностроении.
Кафедра инженерных наук и технологий.
Курсовая работа.
Тема: Проектирование механической системы промышленного робота манипулятора
Санкт - Петербург
2007 год.
Содержание
Введение
1) Часть №1: Проектный расчет вала редуктора
2) Часть №2: Конструирование вала
3) Часть №3: Приложения
Приложение №1
Приложение №2
Приложение №3
Приложение №4
Список литературы
Введение
Редуктором называют механизм, состоящий из зубчатых или червячных передач, выполненный в виде отдельного агрегата, и служащий для передачи вращения от вала двигателя к валу рабочей машины. Кинематическая схема привода может включать, помимо редуктора, открытые зубчатые передачи, цепные или ременные передачи.
Назначение редуктора - понижение угловой скорости и соответствен но повышение вращающего момента ведомого вала по сравнению с ведущим. Механизмы для повышения угловой скорости, выполненные в виде отдельных агрегатов, называют ускорителями или мультипликаторами. Редуктор проектируют либо для привода определенной машины, либо по заданной нагрузке и передаточному числу без указания конкретного назначения.
Редукторы классифицируют по следующим признакам: типу передачи, (зубчатые, червячные или зубчато-червячные), числу ступеней (одноступенчатые, двухступенчатые), типу зубчатых колес (цилиндрические, конические, коническо-цилиндрические), относительному расположению валов редуктора в пространстве (горизонтальные, вертикальные), особенностями кинематической схемы (развернутая, соосная, с раздвоенной ступенью).
Возможности получения больших передаточных чисел при малых габаритах обеспечивают планетарные и волновые редукторы.
Сборку редуктора производят в соответствии со сборочным чертежом редуктора, начиная с узлов валов: на ведущий вал насаживают шпонку и напрессовывают зубчатое колесо до упора в бурт вала; затем надевают удерживающие кольца и устанавливают шарикоподшипники, предварительно нагретые в масле.
Собранные валы укладывают в основание корпуса редуктора и надевают крышку корпуса, покрывая предварительно поверхности стыка крышки и корпуса спиртовым лаком. Для центровки устанавливают крышку на корпус с помощью двух конических штифтоф; затягивают болты, крепящие крышку корпуса.
Таким образом мы видим, что одной из важнейших составляющих редуктора является вал. В этой курсовой работе нам как раз предстоит спроектировать и сконструировать вал редуктора.
Предварительная конструктивная проработка вала и подшипниковых узлов выполняется на стадии эскизного проекта редуктора. Окончательное конструктивное исполнение этих узлов определяется по результатам расчета вала и подшипников по критериям их работоспособности. При известных нагрузках на вал эти расчеты можно произвести, составив расчетную схему вала.
Рассчитаем необходимый нам вал в соответствии с требованиями, изложенными в задании к курсовой работе.
Часть №1: Проектный расчет вала редуктора
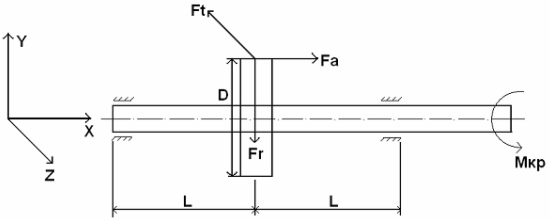
Ft = 2200H Ft – окружная сила
Fa = 770 H Fa – осевая сила
Fr = 836 H Fr – радиальное усилие
l = 0,16 м
D = 0,11 м
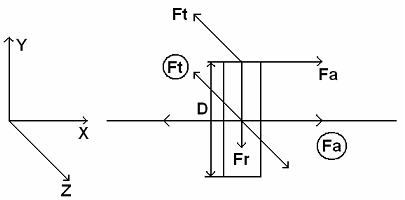
I. Силу Fa и Ft переносим к центру тяжести вала

Момент Ма вызывает изгиб в вертикальной плоскости XOY.
Сила Fa вызывает растяжение, и в расчетах мы ее учитывать не будем.

Момент Mt вызывает кручение вала относительно оси OX.
II. Изобразим пространственную схему вала
Схема представляет собой балку, лежащую на двух опорах.
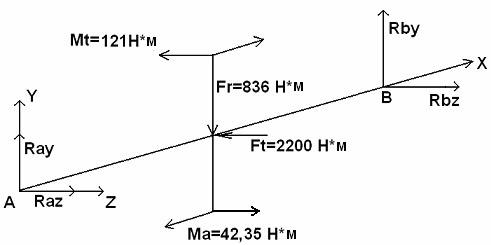
Внешние силы лежат в двух взаимно перпендикулярных плоскостях, поэтому составляющие реакции определим в тех же плоскостях, а затем подсчитаем результирующие реакции.
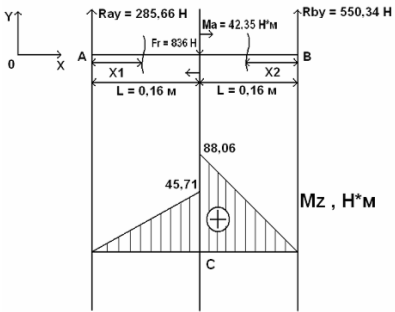
А) Чертим расчетную схему в вертикальной плоскости XOY и определяем составляющие реакции.
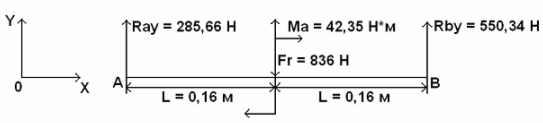
Ray → ∑Mв = 0
–Ray ∙ 2l + Fr ∙ l – Ma =0

Rву → ∑Mа = 0
Rвy ∙ 2l – Fr ∙ l – Ma =0

Проверка: ∑Y = 0
Ray – Fr + Rву = 0
285,66H – 836H + 550,34H = 0H =>Решение верно!
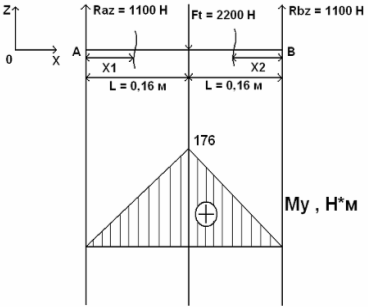
Б) Чертим схему вала в горизонтальной плоскости XOZ и определим составляющие реакции в этой плоскости.

![]()
–Raz ∙2l + Ft ∙l = 0
Rвz → ∑Mа = 0
Rвz ∙2l – Ft ∙l = 0
Проверка: ∑Z = 0
Raz – Ft + Rвz = 0
1100H – 2200H + 1100H = 0H =>Решение верно!
В) Определим суммарную радиальную реакцию в опорах.

![]()
III. Строим эпюру изгибающих моментов
А) В вертикальной плоскости XOY.
1-й участок 0 ≤ X1 ≤ 0,16 м
Mz = Ray ∙ X1
При X1 = 0 м Mz1 = 0 H ∙м
При X1 = 0,16 м Mz1 = 45,71 H ∙м
2-й участок 0 ≤ X2 ≤ 0,16 м
Mz = Rвy ∙ X2
При X2 = 0 м Mz2 = 0 H ∙м
При X2 = 0,16 м Mz2 = 88,06 H ∙м
Б) В горизонтальной плоскости XOZ.
1-й участок 0 ≤ X1 ≤ 0,16 м
My = Raz ∙ X1
При X1 = 0 м My1 = 0 H ∙м
При X1 = 0,16 м My1 = 176 H ∙м
2-й участок 0 ≤ X2 ≤ 0,16 м
My = Rвz ∙ X2
При X2 = 0 м My2 = 0 H ∙м
При X2 = 0,16 м My2 = 176 H ∙м
A)
Б)
IV. Определение суммарных изгибающих моментов в сечении С
- Слева:
![]()
- Справа:
![]()
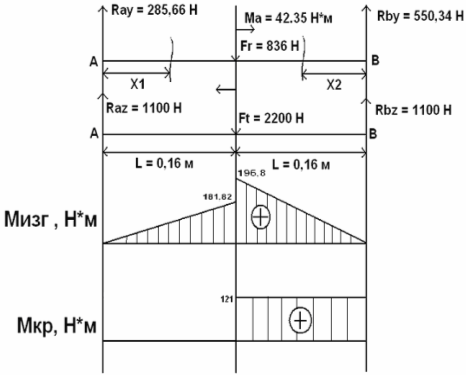
V. Строим эпюру Мкр. Мкр = -121 Н*м
VI. Используя III и IV теории прочности, определяем эквивалентные (приведенные) моменты характерных сечений
![]()
![]()
VII. Определим опасное сечение и выпишем величину моментов в этом сечении
Опасное сечение в точке С.
Мизг = 196,8 Н ∙м
Мкр = 121 Н ∙м
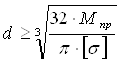
VIII. Вычисляем диаметр вала d
[σ] = 70 МПа
σmax = ![]() ≤ [σ]
≤ [σ]



Похожие работы
... автоматизации приводит лишь к их дискредитации. На развитие роботизации как нового научно-технического направления несомненно повлияло и то обстоятельство, что первоначально созданием промышленных роботов стали заниматься специалисты по вычислительной технике, технической кибернетике и т. д., которые ранее производственными вопросами автоматизации не занимались и вполне искренне верили, что ...
... , – статический момент нагрузки приведенного к валу двигателя, являющийся возмущающим воздействием (). Найдем передаточную функцию по структурной схеме (рис. 2.5) скорректированной системы управляемого привода. . . . . Таким образом, получили, что , значит, рассчитанный коэффициент передачи корректирующего устройства удовлетворяет требованиям к статической точности системы. Далее ...
... ) при запуске в серийное производство контейнеров с оборудованием. Все это ведет к снижению сроков и затрат на подготовку производства. 5Автоматизированное проектирование деталей крыла В настоящем разделе проекта рассматривается автоматизированное проектирование деталей и узлов с целью увязки конструкции и подготовки информации для изготовления шаблонов, технологической оснастки и самих деталей. ...
... около 600 раз, и т. д. Общее время испытаний каждого станка от начала монтажа до отгрузки потребителю составляет 100 ч. [1] 2. Надежность промышленных роботов Серийное изготовление промышленных роботов в стране начато в конце шестидесятых годов. Их выпуск как у нас, так и за рубежом постоянно наращивается. ...
0 комментариев