Навигация
Разработка электропривода для лебедки-подъёмника
22605
знаков
6
таблиц
19
изображений
Введение
Электропривод является неотъемлемой частью многих агрегатов и комплексов, используемых в различных отраслях народного хозяйства, науки и техники. Наряду с тенденцией автоматизации технологических и производственных процессов на базе вычислительной техники, современный электропривод стал наиболее распространённой разновидностью систем автоматического управления техническими объектами. В которых основными производственными агрегатами являются механизмы циклического действия. Особенностью этих механизмов являются специфические режимы работы, состоящие из ряда повторяющихся циклов. Каждый рабочий цикл включает участки установившейся работы или паузы, участки пуска, торможения и реверса, что усложняет работу электропривода и сказывается на процессе работы.
В связи с этим к электроприводу предъявляется ряд требований. Эти требования продиктованы жёсткими пуско-тормозными режимами работы, характеризующимися числом включений, необходимостью регулирования скоростью в заданном диапазоне, надёжностью и экономичностью.
1. Выбор системы электропривода
Современный регулируемый электропривод содержит, как правило, статический (электронный) преобразователь электроэнергии (регулятор, коммутатор), с помощью которого обеспечивается экономичное и плавное регулирование параметров движения в широком диапазоне, формирование переходных процессов с заданным качеством, автоматизация процессов управления. Тип управляемого преобразователя, тип электродвигателя, а также способ управляющего воздействия на двигатель определяют в целом систему электропривода.
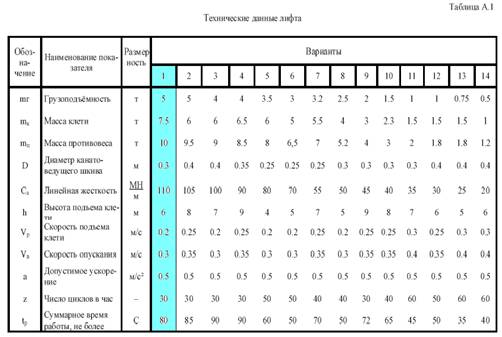
Выбор системы электропривода возможен на основе сравнительного анализа технических данных, приведенных в таблице 1, и исходных данных на проектирование электропривода с учетом изложенных выше особенностей применения наиболее распространенных систем электропривода. ![]()
Исходя из условий задания, определяем диапазон регулирования скорости и полезную мощность двигателя:
Диапазон регулирования скорости:
![]()
Таблица 1-Технические показатели систем электропривода
| Наименование показателей | ТП-Д | ШИР-Д | ПЧИ-АД | НПЧ-АД | ТРН-АД | АВК |
| Источник Питания | ~ | ~ / = | ~ / = | ~ | ~ | ~ |
| Регулирование скорости | вниз1:20 вверх3:1 | вниз1:10 | вниз1:10 вверх2:1 | вниз1:4* | вниз 1:2** | Вниз 1:2 |
| Диапазон мощностей | 2–1000 кВт | до 10 кВт | 5–100 кВт | 10–100 кВт | 2–150 кВт | 50–200 кВт |
– в зоне частотного регулирования 5…20 Гц,
Таблица 2-Удельная стоимость электрооборудования, усл. ед./кВт
| Наиме- нова-ние | до 2 кВт | 2–5 кВт | 5–12 кВт | 12–30 кВт | 30–70 кВт | 70–150 кВт | св. 150 кВт |
| ДПТ | 2000 | 1200 | 720 | 380 | 280 | 260 | 250 |
| АДК | 600 | 400 | 240 | 130 | 115 | 100 | - |
| АДФ | - | 500 | 280 | 170 | 150 | 130 | 110 |
| ТП | - | 1300 | 1000 | 400 | 250 | 130 | 150 |
| ШИР | 3700 | 1800 | 1300 | - | - | - | - |
| ПЧИ | - | - | 5000 | 3500 | 2500 | 1800 | - |
| НПЧ | - | - | 3200 | 1500 | 650 | 400 | - |
| ТРН | - | 800 | 600 | 280 | 170 | 100 | - |
Для некоторых электроприводов важнейшим является массогабаритный показатель. Этот показатель можно использовать и для окончательного выбора, если экономические показатели сравниваемых систем оказались достаточно близкими. Ориентировочные показатели массы различных систем электропривода приведены ниже в таблице 3.
Таблица 3 – Удельная масса электроприводов, кг/кВт
| Система эл. Прив. | до 2 кВт | 2–5 кВт | 5–12 кВт | 12–30 кВт | 30–70 кВт | 70–150 кВт | св. 150 кВт |
| ТП-Д | - | 150 | 80 | 52 | 46 | 42 | 37 |
| ШИР-Д | 150 | 100 | 70 | - | - | - | - |
| ПЧИ-АД | - | - | 300 | 220 | 150 | 100 | - |
| НПЧ-АД | - | - | 65 | 42 | 35 | 28 | - |
| ТРН-АД | - | 65 | 45 | 26 | 23 | 20 | - |
| АВК | - | - | - | - | 46 | 40 | 35 |
Принимая во внимание технические показатели, экономичность и удельную массу электроприводов, и назначение механизма (лебёдка-подъёмник), выбираем систему ПЧИ-АД, так как она позволяет применить асинхронный двигатель с короткозамкнутым ротором получить большой диапазон регулирования и добиться высоких динамических показателей электропривода. Применение систем ПЧИ-АД является единственно возможным для крановых механизмов, работающих в условиях, где не возможен доступ для обслуживания (агрессивные и радиоактивные среды).
Согласно дополнительным требованиям, обеспечение ускорения 0,3 м/с2, механизм относится к строительным башенным кранам [3, стр. 428, т. 13,3]
2. Выбор передаточного устройства и приведение механических величин к валу электроприводаПередаточное устройство привода преобразует вращательное движение электродвигателя во вращающееся или поступательное движение исполнительного органа. В современных приводах существует тенденция упрощения передаточного устройства путем исключения промежуточных звеньев в виде редукторов или других механизмов. При этом заметно возрастает точность, быстродействие и надежность привода. Однако для безредукторных приводов часто требуются специальные низкоскоростные двигатели, выпуск которых отечественной промышленностью явно отстает от потребностей современного электропривода.
Значения конструктивных параметров отдельных звеньев передаточного устройства принимаем с учетом следующих требований:
1) диаметр барабанов должен быть в пределах 0,25…1 м с промежуточными значениями по ряду R10;
D=0.32 м
2) передаточные числа зубчатых цилиндрических передач должны находиться в пределах 8…50 при двух ступенях и в пределах 16…125 при трех ступенях.
Выбирая двухступенчатый редуктор принимаем передаточное число j =25
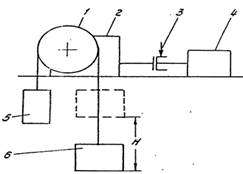
Для электропривода лебёдки-подъемника выбираем передачу двухступенчатый редуктор – барабан – трос (рис. 1).
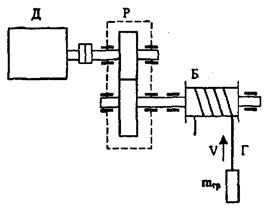
Рисунок 1 – Кинематическая схема грузоподъёмной лебёдки.
Д – электродвигатель, Р – двухступенчатый редуктор, Б – барабан, Г – груз.
КПД передачи [3, стр. 426, т. 13.1]
![]()
где ηбкп –КПД блока канатной передачи, 0,97;
ηред –КПД редуктора, 0,78 – 0,8;
Скорость барабана:
 (1)
(1)
Определим угловые скорости для участков:
1. ![]()
2. ![]()
4. ![]()
5. ![]()
Наибольшую скорость примем за номинальную т.е.
ω2макс= ωном=6,25 рад/с
Найдём скорость вращения вала двигателя:
 (2)
(2)
1. ![]()
2. ![]()
4. ![]()
5. ![]()
![]()
1. ![]()
2. ![]()
4. ![]()
5. ![]()
Приведение скорости рабочего органа к валу двигателя сведено в таблице 4
Таблица 4 – Скорость рабочего органа и вала двигателя i-того участка
| i | 1 | 2 | 3 | 4 | 5 | 6 |
| t, c | 10 | 100 | 5 | 5 | 50 | 5 |
| V, м/c | 0.5 | 0.05 | 0 | -1 | -0.1 | 0 |
| ω, рад/с | 78,125 | 7,8125 | 0 | -156,25 | -15,625 | 0 |
| n, об/мин | 746,4 | 74,64 | 0 | -1492,8 | -149,2 | 0 |
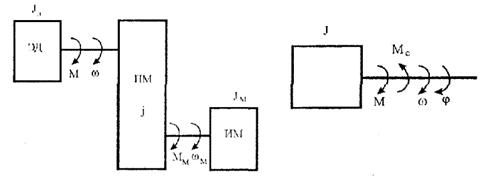
Рисунок 2 – Приведение многомассовой системы к одномассовой при вращательном движении ЭД – электродвигатель; ПМ – передаточный механизм; ИМ – исполнительный механизм;
Момент механизма:
![]()
1. ![]()
2. ![]()
4. ![]()
5. ![]()
Момент сопротивления приведённый к валу двигателя [1 стр. 30 (1,79) 3]
![]() (3)
(3)
1. ![]()
2. ![]()
4. ![]()
5. ![]()
Мощность на каждом участке [1. стр. 9., (1,1)]:
![]() (4)
(4)
1. ![]()
2. ![]()
4. ![]()
5. ![]()
Приведение момента к валу двигателя сведено в таблицу 5.
Таблица 5
| i | 1 | 2 | 3 | 4 | 5 | 6 |
| t, c | 10 | 100 | 5 | 5 | 50 | 5 |
| F, кН | -50 | -40 | - | -55 | -45 | - |
| Мпр, Н·м | -410,25 | -328,2 | - | -451,2 | -369,23 | - |
| Рпр, кВт | 32 | 2,6 | - | 70,5 | 5,8 | - |
Похожие работы
... более 60 В постоянного тока. Положение этих выключателей должно быть обозначено соответствующими символами или надписями: «Вкл.»; «Откл.». 3. Выбор рода тока и типа электропривода Электропривод лифта должен удовлетворять следующим требованиям: а) замыкание токоведущих частей электрического устройства привода тормоза (электромагнита и т.п.) на корпус не должно вызывать самопроизвольное ...
... (рис 2, в), через которое из кривошипной камеры в цилиндр поступает свежий заряд топливовоздушной смеси. В дальнейшем все эти процессы повторяются в такой же последовательности. 3.2 Промышленные тракторы, используемые в строительстве Промышленные тракторы используются для разработки тяжелых грунтов, когда имеет место ударное взаимодействие орудия с грунтом. И тем не менее на ближайшие годы ...
0 комментариев