Навигация
Расчёт переходных процессов в электроприводе
22605
знаков
6
таблиц
19
изображений
6. Расчёт переходных процессов в электроприводе
Произведем линеаризацию характеристик на рабочем участке.
Так как при малом ускорении динамический момент мал, можно рассматривать переходный процесс как для двигателя постоянного тока с независимым возбуждением (с линейной характеристикой).
Ускорение подъёмника общего применения, согласно [2] ограничивают 0,3 м/с2. Приведём его к валу двигателя:
![]()
Ускорение обеспечивается при помощи задатчика интенсивности.
Рассчитаем данные для построения переходных процессов:

– процесс колебательный
1) Пуск двигателя:
Для простоты построения колебательный процесс заменяем апериодическим, с постоянной времени
![]()
![]()
2) Снижение скорости движения до ![]() :
:
3) Торможение двигателя:
4) Пуск двигателя в обратную сторону:
5) Снижение скорости двигателя до ![]() :
:
6) Остановка двигателя:
![]()
7. Проверка выбранного двигателя по нагреву
Тепловые процессы в двигателях в нормальных условиях, благодаря, большой тепловой инерции протекают замедленно, поэтому быстрые изменения нагрузки и, соответственно, тепловыделения фильтруются и зависимость превышения температуры τ(t) сглаживается тем в большей степени, чем меньше время цикла, в сравнении с постоянной времени нагрева Тн двигателя.
Для нашего электропривода условие tц =2,91 мин<<Tн=45 мин и, как выше было отмечено, через некоторое время после начала работы наступает установившийся тепловой режим, при котором превышение температуры колеблется относительно среднего значения τср в узких пределах.
Произведём проверку выбранного двигателя по нагреву, с использованием метода средних потерь, суть которого заключается в вычислении средних потерь двигателя за рабочий цикл и сравнения их с потерями двигателя при работе в номинальном режиме:
 (23)
(23)
Суммарные потери в асинхронном двигателе:
![]() ; (24)
; (24)
Постоянные потери в номинальном режиме:
![]() (25)
(25)
Номинальные потери двигателя определяются как:
 (26)
(26)
Переменные потери в номинальном режиме, с учетом намагничивающих потерь:
![]() (27)
(27)
где ![]()
При частотном способе регулирования скорости асинхронного двигателя постоянные потери определяются следующим выражением:
 (28)
(28)
Считая, что: ![]() , определим постоянные потери в двигателе для каждого интервала рабочего цикла:
, определим постоянные потери в двигателе для каждого интервала рабочего цикла:
![]()
![]()
![]()
![]()
Переменные потери:
![]()
Ток статора определяется по формуле:
![]() (29)
(29)
Приведенный ток ротора определяем по формуле:
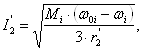 (30)
(30)
Определим токи ротора для каждого интервала рабочего цикла









Подставим уравнение (29) в (30), получим расчетную формулу для определения переменных потерь для каждого интервала рабочего цикла:
![]() (31)
(31)
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Суммарные потери в асинхронном двигателе для каждого интервала рабочего цикла:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Средние потери двигателя за рабочий цикл равны:
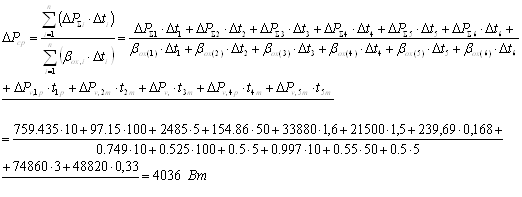 (32)
(32)
![]() -коэффициент, учитывающий ухудшение вентиляции.
-коэффициент, учитывающий ухудшение вентиляции.
![]() =0,5 – коэффициент ухудшения вентиляции при неподвижном роторе.
=0,5 – коэффициент ухудшения вентиляции при неподвижном роторе.
ti-время i-го интервала.

Сравним средние потери двигателя за рабочий цикл с потерями двигателя при работе в номинальном режиме:
![]() (33)
(33)
Таким образом, перегрузка двигателя составляет менее 10%. Следовательно, двигатель удовлетворяет требованиям по перегрузке.
8. Исследовательская частьЗадание: Исследовать точный останов двигателя.
Рассмотрим задачу точного позиционирования рабочего органа механизма в заданных точках пути по сигналам путевых датчиков, или, как ее называют иначе, задачу автоматического точного останова электропривода. Эта задача сводится к автоматическому отключению двигателя и наложению механического тормоза в такой точке пути, из которой электропривод за время торможения, двигаясь по инерции, перемещается в заданную точку пути с требуемой точностью.
Процесс останова, таким образом, начинается с поступления в схему управления электроприводом импульса путевого командоаппарата на отключение двигателя и наложение механического тормоза. Если принять, что отключение двигателя и наложение механического тормоза происходят одновременно и усилие тормоза возрастает до установленного значения скачком, то весь процесс точного останова можно разделить на два этапа.
Первый этап обусловлен наличием собственного времени срабатывания аппаратуры ta в схеме управления электроприводом. В схеме моделирования вследствие возникающего запаздывания в течение времени taдвигатель не отключается от сети, и электропривод продолжает движение со скоростью нач, с которой он подошел к датчику точного останова, и проходит заданный путь.
По истечении времени срабатывания аппаратуры двигатель отключается от сети, и накладывается механический тормоз. Наступает второй этап процесса останова, во время которого запасенная во всех движущихся массах системы кинетическая энергия расходуется на совершение работы по преодолению сил статического сопротивления движению на проходимом при этом пути φ».
Моделирование точного останова с помощью Matlab 6.1., по системе управления ПЧИ-АД производилось по принципу изменения частоты питающего напряжения. То есть при прохождении заданного пути, происходит снижение скорости вращения ωнач двигателя и в момент достижения скорости ωкон, наложение тормозного момента Мт для полного останова двигателя.
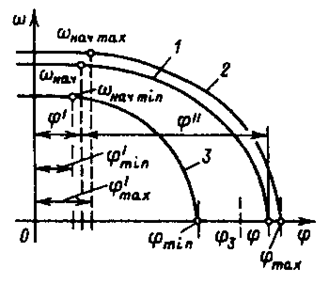
Рисунок 13 – Зависимость ω=f(φ) в процессе точного останова
Зависимость =f(φ) при установке датчика точного останова (ДТО) в точке φ=0 и некоторой начальной скорости нач показана на рис. 13 (кривая 1). Так как все параметры, определяющие путь, проходимый электроприводом в процессе точного останова, при работе электропривода не остаются постоянными, абсолютно точный останов невозможен. Так как после срабатывания ДТО движение системы является неуправляемым, наибольшая неточность останова зависит только от пределов изменения параметров входящих (34).
φ=φ’+φ’’=ωначta+JΣω2нач/2 (Mc+Mт) (34)
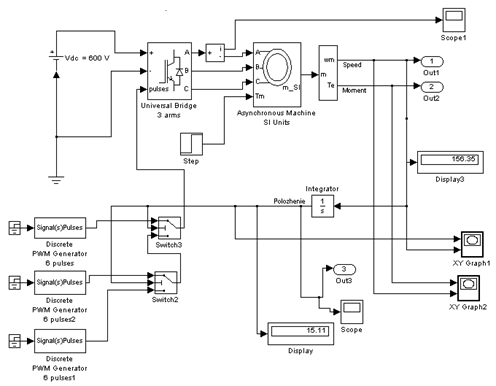
Рисунок 14 – Схема моделирования в Matlab Simulink6.1.
Пределы перемещения можно представить:
φ=φср±Δφmax(35)
где φср-средний путь при точном останове;
Δφmax-максимальная ошибка позиционирования или максимальная неточность останова.
Как показано на рис. 13, ДТО должен устанавливаться на расстоянии φ3=φcp, там же кривые 2 и 3 дают представления о зависимостях =f(φ) при сочетаниях параметров, соответствующих наибольшей ошибке позиционирования.
Максимальная неточность останова:
Δφmax =(φmax – φmin)/2(36)
Докажем вышеизложенное на основе модели отрабатывающей точный останов двигателя.
Опыт 1:
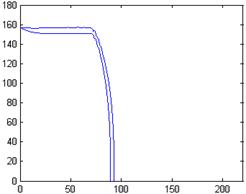
Рисунок 15 – Зависимость ω=f(φ) в процессе точного останова (модель Matlab 6)
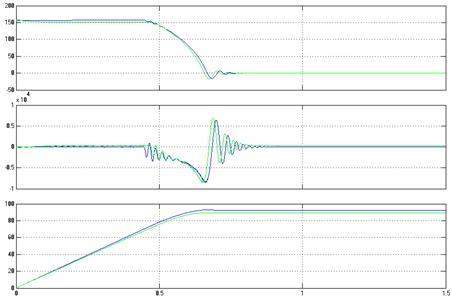
Рисунок 16 – Зависимости ω(t), М(t), φ(t)

Рисунок 17 – Зависимость ω(t), показывающая ошибку позиционирования
Согласно формуле (36) максимальная неточность останова, на основании экспериментальных данных будет равна:
Δφmax=(92,55–89)/2=1,775
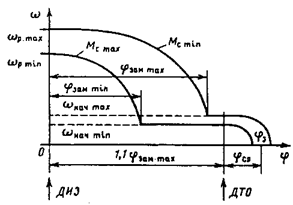
Рисунок 18 – Зависимости ω=f(φ) в процессе замедления до пониженной скорости и точного останова двигателя
На рис. 18 показаны зависимости =f() при двух нагрузках электропривода Мс=Мс.max и Мс=Мс.min, соответствующие как процессу точного останова, так и предшествующему процессу замедления.
Кривые построены в предположении, что при любой нагрузке процессы замедления протекают при неизменном тормозном моменте двигателя М=Мmax=const. Тогда ускорение электропривода в этом процессе будет зависеть от нагрузки:
ε = – (Mmax+Mc)/JΣ (37)
причем наименьшей нагрузке на валу Мс.min соответствует и наименьшее по абсолютному значению ускорение. При Мс=Мс.minначальная рабочая скорость при ограниченной жесткости механических характеристик электропривода максимальна: р=р.max, путь, проходимый электроприводом за время снижения скорости от р.max до нач.max при минимальном ускорении min, также имеет максимальное значение φзам.max. Датчик импульса замедления (ДИЗ), дающий команду на замедление, устанавливается от ДТО на расстоянии 1,1·φзам.max, поэтому, как показано на рис. 18, при Мс=Мс.min электропривод на пониженной скорости нач.max проходит весьма небольшой отрезок пути и время дотягивания к ДТО невелико. При М=Мс.max, р=р.min соответственно φзам=φзам.min<<1,1φзам.max Как следствие большой отрезок пути φзам=1,1φзам.max-φзам.max электропривод проходит на пониженной скорости нач.min, время дотягивания при нач.min<<р.min оказывается значительным и соизмеримым с общим временем, требующимся для перемещения механизма из исходного рабочего положения в заданное.
Рассматривая рис. 18, можно заключить, что время дотягивания при любых нагрузках может быть сведено к минимуму, если устранить статическую ошибку регулирования скорости и сформировать стабильную зависимость =f(t) в процессе замедления.
Докажем вышеизложенное на основе модели отрабатывающей замедление до пониженной скорости и точный останов двигателя:
Опыт 2:
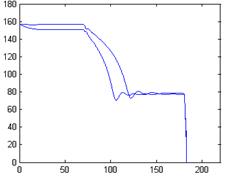
Рисунок 19 – Зависимости ω=f(φ) в процессе замедления до пониженной скорости и точного останова двигателя (модель Matlab 6)
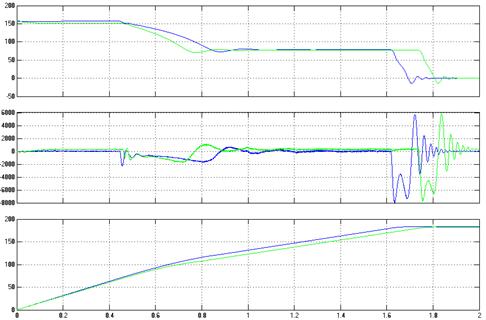
Рисунок 20 – Зависимости ω(t), М(t), φ(t)
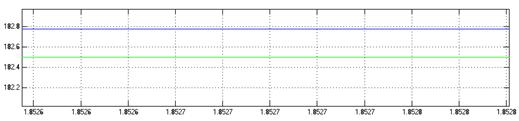
Рисунок 21 – Зависимость ω(t), показывающая ошибку позиционирования
Согласно формуле (36) максимальная неточность останова, на основании экспериментальных данных будет равна:
Δφmax=(182,8–182,49)/2=0,155
Проанализировав данные полученные с помощью проведённых опытов, можно сделать вывод, что система замедления скорости до пониженной и точный останов, позволяют обеспечить наименьшую ошибку позиционирования, что и позволяет более точно производить остановку.
Литература
1. Фираго Б.И. Теория электропривода: Учебное пособие/ Б.И. Фираго, Л.Б. Павлячик. – Мн.: ЗАО «Техноперспектива», 2004. – 527 с.
2. Лебедев А.М. «Следящие электроприводы станков с ЧПУ» Москва. «Энергоатомиздат» 1988
3. Справочник по автоматизированному электроприводу. Под ред. В.А. Елисеева и А.В. Шинянского. – М.: Энергоатомиздат, 1983. – 616 с. Ил.
4. Асинхронные двигатели серии 4А: Справочник/А.Э. Кравчик, М.М. Шлаф, Е.А. Соболенская. – М.: Энергоатомиздат, 1982. – 504 с., ил.
5. Онищенко Г.Б. Электрический привод. Учебник для вузов – М.:РАСХН, 2003. – 320 с. ил.
6. Абрамович И.И. Грузоподъёмные краны промышленных предприятий: Справочник. – М.: Машиностроение, 1989. – 360 с.: ил.
7. И.И. Алиев, М.Б. Абрамов. Электрические аппараты
Похожие работы
... более 60 В постоянного тока. Положение этих выключателей должно быть обозначено соответствующими символами или надписями: «Вкл.»; «Откл.». 3. Выбор рода тока и типа электропривода Электропривод лифта должен удовлетворять следующим требованиям: а) замыкание токоведущих частей электрического устройства привода тормоза (электромагнита и т.п.) на корпус не должно вызывать самопроизвольное ...
... (рис 2, в), через которое из кривошипной камеры в цилиндр поступает свежий заряд топливовоздушной смеси. В дальнейшем все эти процессы повторяются в такой же последовательности. 3.2 Промышленные тракторы, используемые в строительстве Промышленные тракторы используются для разработки тяжелых грунтов, когда имеет место ударное взаимодействие орудия с грунтом. И тем не менее на ближайшие годы ...
0 комментариев