Навигация
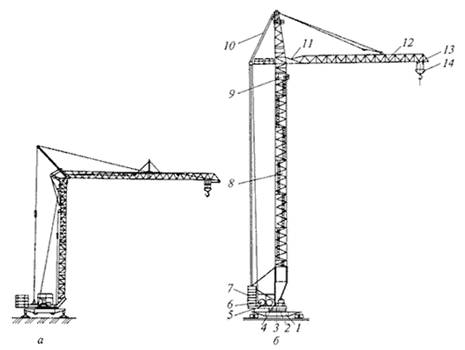
Розрахунок моментів опору на валу двигунів
16171
знак
16
таблиц
0
изображений
3. Розрахунок моментів опору на валу двигунів
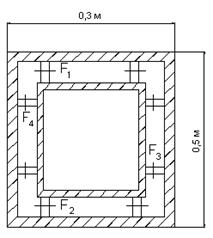
3.1 Моменти опору на валові двигуна механізму підйому стріли
![]() ;
; ![]() ;
;
передаточне число редуктора ![]()
![]()
η=0,95 – ККД передачі від двигуна до стріли.
При підйомі і спуску стріли з вантажем
![]() ;
; ![]()
![]() ;
; ![]()
При підйомі і спуску стріли без вантажу
![]()
![]()
![]() ;
; ![]()
3.2 Моменти опору на валу двигуна механізму підйому вантажу
![]() – передаточне число.
– передаточне число. ![]() ;
;
При підйомі вантажу
 ;
; ![]() ;
;
![]()
![]()
При опусканні вантажу
![]() ;
; ![]() ;
;
![]()
![]()
«–» означає що отримано для гальмового моменту.
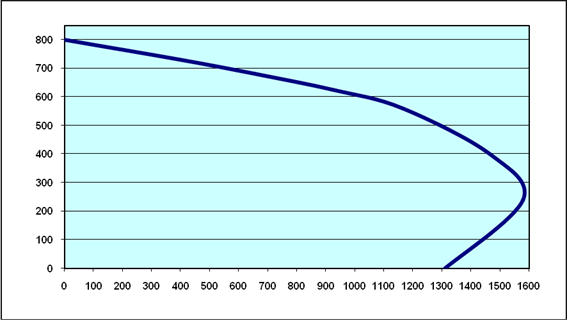
4. Розрахунок перехідних процесів
Зміна електромагнітного чи статичного моменту викликає поява так називаного надлишкового, чи динамічного моменту, що у залежності від його знака викликає розгін чи загальмування електропривода. Процес переходу з одного сталого стану в інше називається перехідним процесом. У більшості випадків перехідні процеси впливають на роботу електропривода. Зменшення їхньої динамічності ущільнює графік робочого процесу, що веде до збільшення продуктивності виконавчого механізму. Причинами перехідного процесу є: зміна навантаження, зміна схеми включення, зміна параметрів живильної мережі.
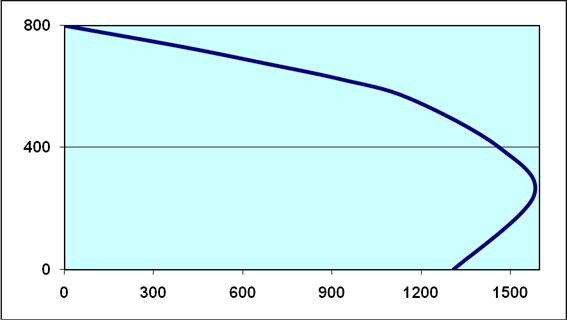
4.1 Розрахунки перехідних процесів у режимах підйому й опускання стріли
Вираження Jпр для даного механізму має вид:
![]() ;
;
![]() ;
;
![]()
Підйом стстріли:
M1ст = 884,88 Нм; Iн = 40,9А;
ωст1 = 96,36 рад/с; МП = 154,8Нм;
JПР= 0,142 кг∙м2; SH' = 0,37;
IH = 20,8A; SH2 = 0,16;
MH = 77,4 H∙м; SCM = 0,0649;
Таблица 3
| Параметр | 1 | 2 | 3 | 4 | 5 | 6 |
| ∆ωi,c-1 | 20,94 | 20,94 | 18,85 | 12,56 | 12,56 | 12,56 |
| ωi,c-1 | 20,94 | 41,88 | 50,73 | 73,29 | 85,85 | 98,41 |
| ∆ti,c | 0,037 | 0,051 | 0,078 | 0,024 | 0,04 | 0,034 |
| tП,c | 0,264 | – | – | – | – | – |
| Mдин, Н∙м | 79,5 | 58,5 | 34,5 | 75 | 45 | 52,5 |
| M, Н∙м | 133,5 | 111 | 87/154,5 | 127 | 87/154,5 | 66 |
| I, A | 34,6 | 28,3 | 22,5/40,4 | 31,9 | 22,5/40,4 | 10,3 |
| S | 0,8 | 0,6 | 0,42 | 0,3 | 0,18 | 0,06 |
Опускання стріли: МСТ3 = 32,53 H∙м; ωст3 = 107 рад/с; JПР = 1,142 кг∙м2;
Похожие работы
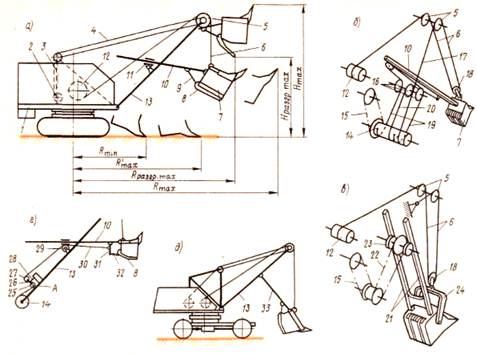


... робочими органами. У зв'язку з цим машини для підготовчих робіт розглядають разом з машинами для земляних робіт. До підготовчих робіт також відносять попереднє розробці спушення міцних і мерзлих ґрунтів. 3.3 Параметри робочих положень екскаватора обладнаного прямою лопатою Робочі рухи канатних одноковшових екскаваторів в режимі екскавації грунту забезпечуються механізмами підйому ковша, ...
... ухилі більше 10% - 3 й 1 платформу, вантажені пакетами. Після закінчення робіт обидва состави повертаються на ланкоскладальну базу, де розвантажують старі й вантажать нові ланки рейко-шпальної решітки. укладальні крани використають також для механізованої зміни стрілочних переводів. 1.1 Укладальні крани УК-25/9-18 Укладальні крани служать для зняття зі шляхи старопридатних рейкових ланок ...

... іння) через контактні пристрої (контактори), що мають ручний привід, замикаючи і розмикаючи силові електричні ланцюги, керують роботою електродвигуна. 1.2 Вимоги до електроустаткування баштового крану Електрообладнання баштового крану за призначенням поділяється на основне – обладнання електроприводу і допоміжне – обладнання робочого та ремонтного освітлення і обігрівання. До основного ...
... , геологічні розрізи. В розділі технологія будівельного виробництва було вивчено науково-теоретичні положення сучасної технології будівельного виробництва і оволодіння практичними методами проектування технологічних процесів. Розроблені технологічні карти виконання робіт по зведенню монолітного каркасу, до яких входять: схема монтажу, схема організації робочого місця при бетонуванні вертикальних ...
0 комментариев