Угловые измерения
Альтернативный метод контроля изделий
Контроль размеров высоты и глубины [42]
Измерения формы и расположения поверхностей
Контроль и измерение резьбы [50, 35]
Измерение и контроль зубчатых колес и передач [50]
Измерения с помощью цифровых измерительных приборов
Электротермические измерительные приборы
Автоматизация системы контроля и управления сбором данных
Измерительные преобразователи
Измерительные роботы [7]
Механические контактные термометры
Приемники полного излучения
Навигация
Измерение и контроль зубчатых колес и передач [50]
Технические измерения
124206
знаков
14
таблиц
16
изображений
4.7. Измерение и контроль зубчатых колес и передач [50]
Приборы для технологического контроля используют в цеховых условиях для контроля изделий и наладки зубообрабатывающего оборудования. Типы, основные параметры и нормы точности приборов для измерения цилиндрических зубчатых колес регламентированы ГОСТом 5368 - 81, ГОСТом 8137 - 81, ГОСТом 10387 - 81 и др.
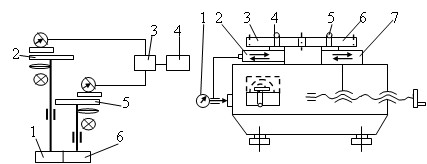
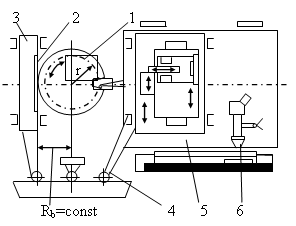
Кинематическую погрешность зубчатых колес 1 и 6 в однопрофильном зацеплении F¢ir контролируют, например, на приборах со стеклянными лимбами 2 и 5, имеющими радиальные штрихи с ценой деления 2¢ (схема I на рис. 4.49). Перемещение штрихов вызывает импульсы тока в фотодиодах. Сдвиг фаз импульсов, вызванный кинематической погрешностью в зубчатой паре и несогласованностью вращения зубчатых колес, определяется фазометром 3 и записывается самописцем 4.
Относительно просты приборы для измерений колебаний межцентрового расстояния F"ir за оборот в двухпрофильном зацеплении (схема II на рис. 4.49). Эти приборы имеют оправки 4 и 5, на которые насаживают контролируемое 6 и образцовое 3 зубчатые колеса. Оправка 5 расположена на неподвижной каретке 7, положение которой может изменяться лишь при настройке на требуемое межцентровое расстояние. Оправка 4 расположена на подвижной каретке 2, которая поджимается пружиной так, что зубчатая пара 3 - 6 находится всегда в плотном соприкосновении по обеим сторонам профилей зубьев. При вращении зубчатой пары вследствие неточностей ее изготовления измерительное межосевое расстояние изменяется, что фиксируется отсчетным или регистрирующим прибором 1.
Накопленную погрешность шага и k шагов можно контролировать на приборе (схема III на рис. 4.49), в котором при непрерывном вращении зубчатого колеса 5 в электронный блок 2 поступают импульсы от кругового фотоэлекрического преобразователя 4, установленного на одной оси с измерительным колесом, и от линейного фотоэлектрического преобразователя 1, выдающего командный импульс при заданном положении зуба (при максимуме отраженного потока). При появлении командного импульса самописец 3 фиксирует ординату погрешностей шага колеса.
Радиальное биение зубчатого венца Frr колеса 1 контролируют на биениемерах (схема IV на рис. 4.49), имеющих модульные профильные
I | II | III | ||||||||||
|
| МЦ- 160М, МЦ-400Б, Э, МЦ-320М, МЦМ-630, БВ-5050, БВ-5029, БВ-5077 | БВ-5015, БВ-5028, ШМ-1-,2, БВ-5056, БВ-5035, БВ-5059 | ||||||||||
|
| V | VI | ||||||||||
| 25003, Б- 10М, БВ-5015, БВ-5050, БВ-5060, БВ-5061 | Б В-4047—25, БВ-5045, БВ-5046, 22202, БВ-5015, БВ-5081, БВ-5082 и др. | МЭК-2, КН-6М, КН-7 |
 БВ-5033. БВ-5053, БВ-936. БВ-5030, БВ-5058, УКМ-5 и др.
БВ-5033. БВ-5053, БВ-936. БВ-5030, БВ-5058, УКМ-5 и др.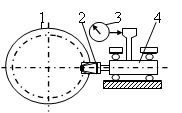
наконечники 2 с углом конуса 40° для контроля наружных зубчатых колес (для контроля внутренних зубчатых колес наконечники имеют сферическую форму). Разность положений наконечников, определяемая с помощью каретки 4 и индикатора 3, характеризует биение зубчатого венца.
Колебание длины общей нормали L - FvWr контролируют на приборах, имеющих два наконечника с параллельными плоскостями и в зависимости от требуемой точности отсчетное нониусное, микрометрическое 2 или индикаторное устройство. Нормалемеры микрометрические (схема V на рис. 4.49) имеют тарельчатые измерительные наконечники, вводимые во впадины зубьев колеса 1. Особенностью контроля длины общей нормали является отсутствие необходимости базирования колеса по его оси.
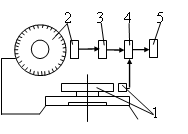
Погрешность обката Fcr обычно выявляют на кинематомерах, позволяющих установить несогласованность движения режущего инструмента (фрезы) и заготовки зубчатого колеса (стола станка) при зубообразовании. Так, на зубофрезерных станках (схема VI на рис. 4.49) преобразователь 1 выдает импульсы, характеризующие угловое положение стола станка, а преобразователь 2 — импульсы, характеризующие положение шпинделя. Блок 3 служит для приведения масштаба импульсов высокоскоростного звена 2 к масштабу тихоходного звена 1 станка. После сравнения импульсов в устройстве 4 разность фаз, пропорциональная погрешности углового положения шпинделя относительно стола станка, регистрируется самописцем 5.
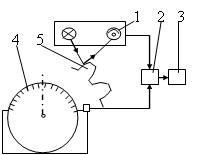
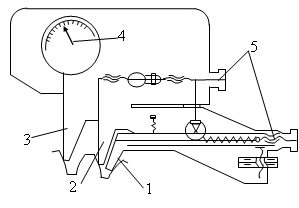
Плавность работы зубчатых колес можно выявлять при контроле местной кинематической погрешности, циклической погрешности колеса и передачи на приборах для измерения кинематической точности, в частности путем определения ее гармонических составляющих на автоматических анализаторах. С помощью поэлементных методов контролируют шаг зацепления, погрешность профиля и отклонения шага. Шаг зацепления fpbr контролируют с помощью накладных шагомеров (схема I на рис. 4.50), снабженных тангенциальными наконечниками 2 и 3 и дополнительным (поддерживающим) наконечником 1. Измерительный наконечник 3 подвешен на плоских пружинах. При контроле зубчатого венца перемещение измерительного наконечника фиксируется встроенным отсчетным устройством 4. При настройке положение наконечников 1 и 2 можно менять с помощью винтов 5.
Погрешность профиля ffr выявляют на эвольвентомерах, сопоставляя теоретическую эвольвенту, воспроизводимую прибором, с реальной эвольвентой контролируемого зуба. В приборе типа БВ-5062 (схема II на рис. 4.50) теоретическая эвольвента воспроизводится образцовым сектором 1, расположенным на одной оси с контролируемым колесом. В качестве линейки обката служит каретка 3, которая связана с сектором с помощью охватывающей его ленты 2. Радиус основной окружности меняют при настройке путем изменения положения упора 4, находящегося на измерительной каретке 5. Микроскоп 6 служит для настройки прибора на требуемый радиус основной окружности.
Для измерения отклонений шага fptr от среднего значения по колесу используют накладные приборы (схема III на рис. 4.50), с помощью которых шаг Рt определяют как расстояние между базовым 2 и измерительным 3 наконечниками. На измеряемом колесе 4 прибор устанавливают по упорным наконечникам 1 и 5. При измерении сравнивают значения всех шагов с первоначальным шагом, отсчитываемым по шкале головки 6.
 | |||
 | |||
| I | II | ||||
| 21802, 21702, 21703, БВ-5070 и др. | КЭУМ, БВ-5057, БВ-5062, БВ-5078 и др. | ||||
 III |
| ||||
| ШМ-1, БВ-5079 |
|
Полнота контакта. Размеры пятна контакта определяют либо по следам приработки после некоторого периода работы передачи на контрольно-обкатных станках и приспособлениях, либо по следам краски, оставившей отпечаток на парном колесе. С помощью поэлементных методов измеряют осевой шаг по нормали, отклонение направления зуба, погрешность формы и расположения контактной линии и др. Так, на приборе БВ-5028 (схема I на рис. 4.51) можно контролировать несколько параметров зубчатых колес — отклонения контактной линии Fkr, осевого шага Fpxnr и погрешности шага. Каретка с измерительным наконечником 1, предварительно установленным на угол наклона контактной линии, перемещается по направляющей 3. При согласованном движении каретки и вращении контролируемого зубчатого колеса 2 наконечник 1 воспринимает непрямолинейность и отклонения от направления этой линии, которые фиксируются самописцем. Отклонение осевого шага воспринимается измерительным наконечником тогда, когда последний перпендикулярен винтовой линии.
Поворот зубчатого колеса на осевой шаг осуществляют с помощью микроскопа с оптическим диском. При измерении отклонений от направления зуба Fbr прямозубых колес на приборах, у которых существует каретка с точными продольными направляющими, измерительный наконечник перемещают вдоль оси измеряемого колеса. При контроле косозубых колес винтовую линию, воспроизводимую в приборе в результате поворота колеса и продольного перемещения измерительного узла или, как в ходомере БВ-5034 (схема II на рис. 4.51), продольного перемещения стола 1 вместе с проверяемым колесом 4, сравнивают с реальной эвольвентой. Согласованность поступательного и вращательного движений колеса обеспечивают с помощью наклонной линейки и охватывающих шпиндель 3 лент, концы которых закреплены на поперечной каретке 2. Измерительный узел
I | II | ||||||||||
| БВ-5028 и др. | БВ-5034, БВ-5075 и др. |
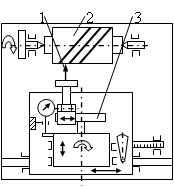
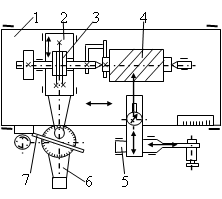
Рис. 4.51. Приборы для контроля полноты контакта
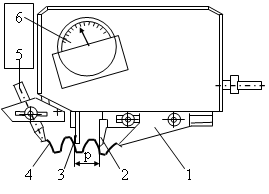
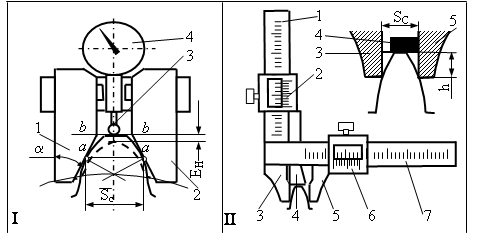
5, установленный на станине, можно настраивать на необходимые параметры зубчатого колеса. Микроскоп 6 позволяет осуществлять точную установку линейки 7 на заданный угол.Боковой зазор между неработающими профилями зубьев в собранной передаче можно контролировать с помощью набора щупов, c помощью заложенной между зубьями свинцовой проволочки или методом люфтования. В последнем случае одно из зубчатых колес медленно вращается, а второе при этом совершает высокочастотные колебания, амплитуда которых характеризует боковой зазор. В реальном зубчатом колесе боковой зазор образуется в результате утонения зуба при смещении исходного режущего контура ЕHr на зуб колеса. Это смещение измеряют на тангенциальных зубомерах (схема I на рис. 4.52), имеющих два базовых щупа 1 и 2, измерительный наконечник 3 и показывающий прибор 4. Перед измерением зубомер настраивают на заданный модуль по ролику расчетного диаметра.
С помощью тангенциальных зубомеров контролируют, по существу, положение постоянной хорды а – а относительно линии выступов b - b, а с помощью кромочных зубомеров измеряют толщину зуба S (параметр Ecr) на заданном расстоянии h от линии выступов (схема II на рис. 4.52). Эти зубомеры имеют нониусные, микрометрические или индикаторные отсчетные устройства. В нониусных штангензубомерах требуемое положение постоянной хорды, т. е. координирующей губки 4, устанавливают с 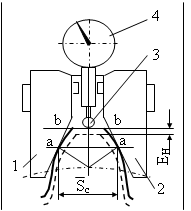 помощью нониусной пары 1 - 2, а измерения хорды осуществляют с помощью нониусной пары 7 - 6 путем введения измерительных наконечников 3 и 5 во впадины зубчатого венца.
помощью нониусной пары 1 - 2, а измерения хорды осуществляют с помощью нониусной пары 7 - 6 путем введения измерительных наконечников 3 и 5 во впадины зубчатого венца.
| НЦ 23500 - 23800 | БВ-5016к, БВ-5017к, ШЗ-18, ШЗ-36, ЗИМ-16 и др. |
Рис. 4.52. Приборы для контроля бокового зазора
Существуют различные приборы для контроля цилиндрических, конических, червячных, червяков и прочих колес станкового и накладного типов, разделяемых по классам точности на три группы: А, АВ и В. Интенсивно разрабатываются полуавтоматические и автоматические приборы, в том числе приборы активного контроля, использующие экранную оптику, цифровой отсчет, запись результатов измерения, машинную обработку результатов, управление производственным процессом и т. п.
Похожие работы
... замыкающего звена [Bå MIN ]: [Bå MIN ]=–0.4 мм. Предельный зазор: , [Så]=0.4 мм. Предельный натяг: , [Nå]=–0.4 мм. Среднее отклонение: , [=0. 6.2.1. Метод полной взаимозаменяемости Предполагаем, что подшипник, являющийся стандартным изделием, уже имеет определенный квалитет и размер Т4=36–0.3. Согласно [1], табл. 3.3., получаем ...
... являются игровые автоматы, диагностическое оборудование. По метрологическому назначению все СИ подразделяются на два вида: рабочие СИ и эталоны. Рабочие СИ (РСИ) предназначены для проведения технических измерений. По условиям применения они могут быть: 1) лабораторными, используемыми при научных исследованиях, проектировании технических устройств, медицинских измерениях; 2) производственными, ...
... цепей, могут быть конструкторскими (выбор размеров и точности звеньев), технологическими (обеспечение заданного зазора при сборке), настроечными (наладка станков), связанными с выполнением технических измерений и другими. Размерные цепи бывают различных видов в зависимости от назначения (конструкторские, технологические, измерительные), характера взаимного расположения звеньев (линейные, угловые, ...
... действия выпускаемых машин и приборов находится в прямой зависимости от точности их изготовления и контроля показателей качества с помощью технических измерений. Точность и ее контроль служит исходной предпосылкой важнейшего свойства совокупности изделий – нормирования. При конструировании применение принципа нормирования ведет к повышению качества и снижению себестоимости конструкции. 1 ...
0 комментариев