Навигация
Относительная разница (в %) коэффициентов передачи по напряжению косинусной и синусной обмоток
34144
знака
0
таблиц
16
изображений
5. Относительная разница (в %) коэффициентов передачи по напряжению косинусной и синусной обмоток
![]() . (3.20)
. (3.20)
Вследствие разницы в числе витков вторичных обмоток коэффициенты передачи по напряжению могут несколько отличаться. Это отклонение для данного класса точности не должно превосходить относительной амплитудной ошибки воспроизведения синусоидальной зависимости.
4. Погрешности КИДУ 4.1 Классификация погрешностей
Всем описывающим электроэлементам присущи погрешности, которые по физическим причинам можно разделить на четыре основные группы:
1) погрешности, вытекающие из принципа работы датчика;
2) погрешности от конструктивных ограничений;
3) технологические погрешности;
4) погрешности, вызванные влиянием внешней среды.Первая группа погрешностей, вытекающих из принципа действия, свойственна счетно-решающим электроэлементам, которые предназначены для решения тех или иных функциональных зависимостей.
С этой точки зрения датчики угла являются списывающими элементами, работа которых заключается в преобразовании углового перемещения ротора в пропорциональный ему электрический сигнал. Для выше рассмотренных типов датчиков погрешности, вызывающие нарушение этой пропорциональности, которая чаще всего выражается линейным законом, не связаны с принципом работы датчиков, а являются следствием влияния причин последующих групп. Поэтому остановимся именно на последних трех группах причин, вызывающих погрешности датчиков.
Конструктивные погрешности. Наличие магнитопровода статора и ротора в датчиках угла, как и во всех электрических машинах и аппаратах, приводит к искажению идеальной кривой намагничивания. Нелинейность кривой намагничивания обусловливает нелинейный характер изменения величины выходного напряжения от угла поворота ротора. Кроме того с нелинейностью кривой намагничивания связано появление высших временных гармоник в намагничивающем токе. Рассмотренные типы датчиков являются дифференциальными только по отношению к основной и нечетным гармоникам выходного напряжения. Поэтому нелинейность кривой намагничивания, приводит к. увеличению остаточного напряжения датчиков за счет присутствия в нем четных гармоник.
Следует отметить, что все явления, связанные с искажением кривой намагничивания, в датчиках рамочного типа проявляются в значительно меньшей степени, чем в других датчиках. Это объясняется наличием в датчиках рамочного типа значительного по величине воздушного зазора, представляющего собой большое линейное магнитное сопротивление, по сравнению с которым нелинейное сопротивление стального участка магнитной цепи составляет незначительную величину.
Специфическая конфигурация магнитопровода, а также наличие воздушного зазора обусловливают наличие в датчике значительных полей рассеяния. Распределение и расчет этих полей представляет известные трудности. Асимметрия, вводимая полями рассеяния в общую картину поля датчика, вызывает появление асимметрии и нелинейности выходного напряжения датчика при повороте ротора.
Технологические погрешности. Значения допусков на отдельные детали и несовершенство технологии изготовления и сборки датчиков определяют наличие целого ряда погрешностей датчиков угла.
Необходимым условием при установке в гироскопе датчика угла с перемещающимся ротором является требование равномерности воздушного зазора между статором и ротором. Это объясняется тем, что при неравномерном воздушном зазоре магнитные проводимости под крайними пальцами различаются, что приводит к появлению значительного по величине выходного напряжения в нулевом положении ротора датчика. В некоторых конструкциях гироскопов выходное напряжение может быть уменьшено с помощью поворота статора датчика и подключения фазирующего сопротивления или за счет использования компенсирующих устройств. Однако, несмотря на это, неравномерный воздушный зазор приводит к искажению характеристики выходного напряжения датчика, делая ее несимметричной.
Аналогичное влияние, но в несколько меньшей степени, оказывает магнитная асимметрия магнитопроводов обоих типов датчиков. Эта асимметрия вызывается двумя причинами:
1) различной величиной магнитной проводимости пластин магнитопровода вдоль и поперек направления проката;
2) наличием контуров электрической проводимости в магнитопроводе, возникающих при механической обработке пакетов магнитопровода, вследствие замыкания пластин между собой, недостаточной изоляции между пластинами и т. п.
Короткозамкнутые контуры в магнитопроводе датчика, а также короткозамкнутые витки в выходных катушках приводят к фазовому сдвигу потока, пронизывающего эти контуры, следствием чего является дополнительный фазовый сдвиг между напряжениями в левой и правой половине выходной обмотки.
Отличие угла сдвига фазы между напряжениями выходных катушек от 180° приводит к появлению значительного остаточного напряжения, для устранения которого необходимо использовать один из выше рассмотренных методов и которое приводит к дополнительному увеличению несимметричности характеристики выходного напряжения датчиков. Большое влияние на точность датчика рамочного типа оказывает качество намотки рамки – двух встречно включенных катушек, перемещающихся в воздушном зазоре. Несимметричное выполнение этих катушек приводит к тому, что при повороте рамки изменение потокосцепления с каждой катушкой неодинаково, поэтому нелинейность и несимметричность характеристики выходного напряжения такого датчика существенно увеличиваются.
Этим объясняется более высокая (по сравнению с датчикам рамочного типа) точность датчиков с перемещающимся ротором для которых равномерная намотка выходных катушек не представляет больших трудностей.
При сборке двухкоординатных датчиков угла предъявляются высокие требования к запрессовке пакетов магнитопроводов дл каждой координаты, которые должны быть сдвинуты один относительно другого на 90°. Отклонение от этого угла приводит к созданию электрического сигнала по обеим координатам приводит к смещению ротора в направлении оси одной из координат. Сигнал по второй координате дает ложный угол.
Погрешности, вызванные влиянием внешней среды. При работе датчиков угла в гироскопе на точность их работы оказывают существенное влияние температурные воздействия, а также наличие внешних электромагнитных полей.
Теплоизлучение других элементов гироскопического прибор может привести к принудительному нагреву датчика угла. В это случае решающее значение имеет правильный выбор конструкционных материалов датчика, так как различные коэффициенты линейного расширения деталей датчика могут привести к нарушению первоначально установленной величины и равномерности во; душного зазора, а следовательно, к смещению электрического нуля датчика и искажению характеристики выходного напряжения.
При изготовлении материала магнитопровода датчика из ферритов в результате нагрева происходит значительное ухудшению магнитных свойств последних, что непосредственно привода к ухудшению параметров датчиков.
В рассматриваемых датчиках при нулевом положении ротор воздействие внешнего электромагнитного поля приводит к увеличению остаточного напряжения за счет четных гармоник э. д. с складывающихся в дифференциальных выходных обмотках.
5. Расчет КИДУ
Согласно техническому заданию, имеем следующие исходные данные для расчета КИДУ:
· наружный диаметр корпуса Dk = 32 мм;
· внутренний диаметр ДУ Dac = 12 мм.
· длина корпуса ДУ lk = 14 мм.
· крутизна датчика kду=6,00 в/град;
· напряжение возбуждения U1 = 36 В;
· номинальная частота f = 400 Гц;
· диаметр проволоки обмотки статора не более 0,08 мм.
Методика расчета изложена в [2] и [4].
5.1 Выбор геометрии магнитопровода1. Определяем максимально допустимые значения индукции в магнитопроводе и плотности тока в обмотках при холостом ходе:
 (5.1)
(5.1)
 (5.2)
(5.2)
![]() =0,5625 Тл.
=0,5625 Тл.
![]() =375 а/см2
=375 а/см2
Материал для высечки в соответствии с [4] выберем 50Н ГОСТ 10394-74.
2. Определяем отношение «теоретических» площадей пазов статора и ротора:
![]() (5.3)
(5.3)
где ![]() – коэффициент нагрузки, принимается равным 2 [4],
– коэффициент нагрузки, принимается равным 2 [4], ![]() =0,22,
=0,22, ![]() =0,32:
=0,32:
![]() =1,375
=1,375
3. Определяем приведенный воздушный зазор:
![]() (5.4)
(5.4)
где ![]() = 0,1 мм – величина воздушного зазора;
= 0,1 мм – величина воздушного зазора; ![]() = 1,02;
= 1,02; ![]() = 1,003 ([4] и п.8).
= 1,003 ([4] и п.8).
![]() мм.
мм.
4. Приняв Dн = 30 мм, находим отношение:
![]() (5.5)
(5.5)
где
![]() (5.6)
(5.6)
![]() см2
см2
5. По известным ![]() и
и ![]() с помощью графиков, приведенных на рисунке 5-7 [4], определяем:
с помощью графиков, приведенных на рисунке 5-7 [4], определяем:
![]() ;
; ![]()
6. Находим основные величины, характеризующие геометрию пластин статора и ротора (см. рисунки 5.1 и 5.2):
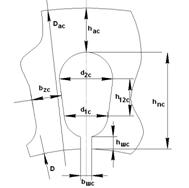
Рисунок 5.1 Основные геометрические параметры пластин статора
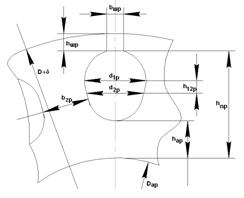
Рисунок 5.2 Основные геометрические параметры пластин ротора
![]() (5.7)
(5.7)
![]() (5.8)
(5.8)
![]() (5.9)
(5.9)
![]() (5.10)
(5.10)
![]() (5.11)
(5.11)
![]() (5.12)
(5.12)
После расчета получаем:
![]() мм,
мм, ![]() мм,
мм, ![]() мм,
мм, ![]() мм,
мм, ![]() мм,
мм, ![]() мм.
мм.
Дополнительные параметры геометрии пластин ротора и статора [2]:
![]() (5.13)
(5.13)
Принимаем ![]() мм [4], число пазов статора и ротора соответственно (по [4]):
мм [4], число пазов статора и ротора соответственно (по [4]): ![]() .
.
![]() (5.14)
(5.14)
![]() (5.15)
(5.15)
![]() (5.16)
(5.16)
![]() (5.17)
(5.17)
![]() (5.18)
(5.18)
![]() (5.19)
(5.19)
![]() (5.20)
(5.20)
![]() (5.21)
(5.21)
![]() (5.22)
(5.22)
![]() (5.23)
(5.23)
![]() мм,
мм,
![]() мм,
мм,
![]() мм,
мм,
![]() мм,
мм,
![]() мм,
мм,
![]() мм2.
мм2.
![]() мм,
мм,
![]() мм,
мм,
![]() мм
мм
Поскольку величина получилась отрицательной уменьшим значение ![]() до 4 мм, а для обеспечения внутреннего размера Æ12 применим переходную деталь типа ось.
до 4 мм, а для обеспечения внутреннего размера Æ12 применим переходную деталь типа ось.
![]() мм,
мм,
![]() мм,
мм,
![]() мм,
мм,
![]() мм2.
мм2.
7. Толщина пластин высечки:
![]() (5.24)
(5.24)
![]() мм.
мм.
Длина пакета статора:
![]() . (5.25)
. (5.25)
![]() мм.
мм.
8. Определяем коэффициенты ![]() и
и ![]()
![]() (5.26)
(5.26)
где
 (5.27)
(5.27)
По [4] принимаем ![]() мм.
мм.
![]()
9. Находим ![]() :
:
 (5.28)
(5.28)
По [4] принимаем ![]() Ом.
Ом.

5.2 Расчет обмоток и параметров КИДУ
1. Определяем относительные значения параметров обмотки возбуждения (таблицы 3-2 и 3-3 [4]):
 (5.29)
(5.29)
 (5.30)
(5.30)
![]() (5.31)
(5.31)
![]() (толщину магнитопровода
(толщину магнитопровода ![]() выбираем равной 4 мм.)
выбираем равной 4 мм.)
 ,
,
По [4]: ![]() ,
, ![]() .
.
 .
.
2. Определяем эффективное число витков обмотки возбуждения:
 (5.32)
(5.32)
![]() витков.
витков.
4. Поскольку обмотка статора является концентрической и состоит из 5 секций [4], находим число витков в каждой из секций:
![]() , i=1..5.
, i=1..5.
После округления получаем количество витков в каждой секции:
5. Определяем сечение провода обмотки возбуждения:
![]() (5.33)
(5.33)
![]() (5.34)
(5.34)
![]() мм2.
мм2.
![]() мм, округляем до 0,08 мм.
мм, округляем до 0,08 мм.
6. Определяем эффективное число витков вторичной обмотки [2], учитывая, что ![]() , где
, где ![]() – коэффициент трансформации,
– коэффициент трансформации, ![]() :
:
 (5.35)
(5.35)
![]() (5.36)
(5.36)
![]() В.
В.
 витков.
витков.
7. Обмотка ротора является концентрической и состоит из 3 секций [4], находим число витков в каждой из секций:
![]() , i=1..3.
, i=1..3.
После округления получаем количество витков в каждой секции:

8. Определяем сечение провода вторичной обмотки:
![]() (5.37)
(5.37)
![]() (5.38)
(5.38)
![]() мм2.
мм2.
![]() мм. Принимаем 0,15 мм.
мм. Принимаем 0,15 мм.
Используя полученные величины, вычерчиваем рабочие чертежи пластин статора и ротора.
6. КИДУ со скосом пазов
КИДУ со скошенными пазами можно представить как совокупность нескольких элементарных преобразователей с прямыми пазами, сдвинутых относительно друг друга по углу.
Для простоты будем считать, что скос паза произведен только на роторе. Пусть Еэ = f(а) – функциональная зависимость э. д. с, воспроизводимая элементарным преобразователем. В общем случае Еэ=f(a) – периодическая несинусоидальная функция, причем в силу своей симметрии относительно начала координат она содержит только нечетные гармоники. Если скос паза выполнен по закону уск = у(х) (рисунок 6.1), то с учетом скоса функцию Еэ = f(а) запишем в виде
![]() (6.1)
(6.1)
где R - радиус расточки.
Расположим начало координат посредине пакета. Тогда выходная э. д. с. преобразователя будет равна
 (6.2)
(6.2)
Если угол скоса паза выполнить по закону
![]() , (6.3)
, (6.3)
то выходная э. д. с. преобразователя будет изменяться по синусоидальному закону от угла поворота ротора. Действительно, представим периодическую функцию (6.1) в виде ряда Фурье, содержащего нечетные гармоники
![]() (6.4)
(6.4)
где k = 1; 2; 3...
Подставляя это выражение в (6.2), получим
 (6.5)
(6.5)
Используя приведенную выше формулу (6.3) для у(х) и выполняя интегрирование, получим:
![]() (6.6)
(6.6)
На практике выполнение скоса паза по закону (6.3) трудно осуществимо по технологическим соображениям; чаще всего при меняется равномерный скос пластин магнитопровода ротора (рисунок 6.2). При таком скосе:
![]() . (6.7)
. (6.7)
В этом случае выходная э. д. с. равна
![]() (6.8)
(6.8)
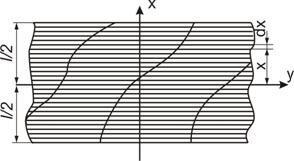
Рисунок 6.1 Магнитная система со скосом паза, выполненным по закону ![]()
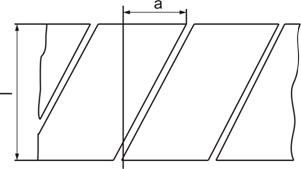
Рисунок 6.2 Магнитная система с равномерным скосом паза
Из этого выражения следует, что при равномерном скосе паза возможно уничтожение какой-либо одной гармоники и кратных ей. Условием уничтожения гармоник порядка (2k + 1) будет
![]() (6.9)
(6.9)
Поскольку наибольшей по амплитуде из высших гармоник является третья, то скос чаще всего выполняется для уничтожения третьей гармоники. В этом случае уравнение линии скоса приобретает вид
![]() (6.10)
(6.10)
В нашем случае примем величину угла скоса пазов 30 градусов.
Заключение
В данной курсовой работе был спроектирован кольцевой индукционный датчик угла, представляющий собой поворотный трансформатор, при этом была использована соответствующая методика расчета. Характеристики спроектированного КИДУ удовлетворяют величинам, заданным в техническом задании: крутизна датчика kду=6,00 в/град, напряжение возбуждения U1 = 36 В, номинальная частота f = 400 Гц, наружный диаметр корпуса Dk = 32 мм, внутренний диаметр ДУ Dac = 4 мм, длина корпуса ДУ lk = 14 мм, толщина обмотки lоб=12 мм, количество витков концентрической обмотки статора ![]() , диаметр провода обмотки статора 0,08, количество витков концентрической обмотки ротора
, диаметр провода обмотки статора 0,08, количество витков концентрической обмотки ротора ![]() , диаметр проволоки обмотки ротора 0,15 мм. На основе рассчитанных геометрических параметров были вычерчены пластины магнитопроводов статора и ротора КИДУ.
, диаметр проволоки обмотки ротора 0,15 мм. На основе рассчитанных геометрических параметров были вычерчены пластины магнитопроводов статора и ротора КИДУ.
Список использованных источников
1. Никитин Е.А. Гироскопические системы, ч.III. Элементы гироскопических приборов: учеб. пособие для вузов / Е. А. Никитин и др.; под ред. Д. С. Пельпора., – М.: «Высшая школа». 1979. –472 с.: ил.
2. Бабаева Н.Ф. Расчет и проектирование элементов гироскопических устройств: учеб. пособие для приборостроительных спец. вузов / Н. Ф. Бабаева и др. – Л.: «Машиностроение». 1967. –480 с.
3. Хрущев В.В. Электрические машины систем автоматики: учебник для вузов / В.В. Хрущев; – 2-изд., перераб. и доп. – Л.: Энергоатомиздат. Ленингр. отд-ние. 1985. –186 с.
4. Хрущев В.В. Электрические микромашины / В.В. Хрущев; – Л., «Энергия». 1969. –278 с. с ил.
5. Сломянский Г.А. Детали и узлы гироскопических приборов: атлас конструкций / Г.А. Сломянский, А.В. Агапов, Е.М. Радионов и др.; – М.: Машиностроение. 1975. –306 с.
Похожие работы
... относится к измерительной технике и позволяет повысить точность измерения угла поворота путём увеличения чувствительности за счёт повышения градиента магнитной проницаемости измерительной цепи трансформаторного датчика угла поворота, и может быть использован для различных механизмов, где требуется определить точное значение угла поворота. Также он может быть использован для контроля возвратно- ...
... гирокомпаса с физическим маятником. Анализируя эти уравнения, нетрудно найти, что период собственных колебаний гирокомпаса определяется выражением Т = 2p . V H / Cгn u cosj , (1. 5) а коэффициент затухания : h =Cв m n /H. (1. 6) Очевидно, что величины периода колебаний и коэффициента за- ...

... на конструкцию, параметры и методы расчета разрабатываемого датчика. Так требования работоспособности датчика при воздействии вибрации предопределяет либо проектирование датчика с высокой собственной частотой, лежащей за пределами частотного диапазона вибрации, либо введения демпфирования, либо какие-то другие меры, обеспечивающие во-первых, неизменность показаний датчика, а во-вторых его ...
... и решением вопросов правильного расположения транспортных путей вблизи бровок, за пределами призмы обрушения. Глава 11. Экономика. 11.1. Исходные показатели при проектировании водоснабжения города и промышленных предприятий. 1. Суточная производительность системы, 42421 м3/сут. 2. Перечень сооружений, запроектированных для подъема и очистки воды: - водозаборные сооружения ...
0 комментариев