Огляд аналогів розробляємої комп’ютеризованої вимірювальної системи параметрів електричних машин з газомагнітним підвісом
Техніко-економічне обґрунтування доцільності розробки комп’ютеризованої вимірювальної системи параметрів електричних машин з газомагнітним підвісом
Проведення маркетингових досліджень
Економічна доцільність нової технічної розробки
Розробка принципової схеми комп’ютеризованої вимірювальної системи параметрів електричних машин з газомагнітним підвісом
Розробка первинного вимірювального перетворювача
Розробка пристрою спряження перетворювача з ПЕОМ
КОм (5.2)
Розробка програмного забезпечення
Розрахунок похибки вимірювання кутової швидкості
Економічна частина
Розрахунок виробничої собівартості комп’ютеризованої вимірювальної системи параметрів електричних машин з газомагнітним підвісом
Розрахунок експлуатаційних витрат для нового пристрою
Погіршення стану здоров’я користувачів ЕОМ, які пов’язані зі стресом
Дія іонізуючих випромінювань та електромагнітного імпульсу на радіоелектронні системи
Мета та вихідні дані для проведення робіт
Навигация
Економічна доцільність нової технічної розробки
Комп’ютеризована вимірювальна система параметрів електричних машин з газомагнітним підвісом
129405
знаков
15
таблиц
14
изображений
2.5 Економічна доцільність нової технічної розробки
2.5.1 Прогнозування собівартості
Спрогнозуємо собівартість нової технічної розробки методом питомої ваги.
Цей метод доцільно застосовувати тоді, коли є можливість розрахувати одну з прямих витрат і встановити питому вагу даної статті, в собівартості аналогова. Собівартість одиниці нової продукції можна спрогнозувати за формулою:
![]() (грн). (2.10)
(грн). (2.10)
де КН – коефіцієнт, який враховує конструктивні та технологічні особливості нової розробки, КН = 1÷1,2
ВП – величина однієї із статей витрат, яка вибрана за основу, грн.;
П – питома вага однієї із прямих витрат в собівартості аналогова, %;
Вартість одиниці продукції аналога становить приблизно 1000 грн. Відомо, що питома вага для аналога становитиме 60 %, а питома вага нової розробки становить 65 %.При цьому собівартість розробки складатиме:
![]() (грн)
(грн)
Собівартість же нової розробки становитиме:
![]() (грн)
(грн)
2.5.2 Прогнозування величини капітальних вкладень
Розрахуємо величину капітальних вкладень для більшості сучасних аналогів та для нової розробки за формулою:
К = В * А * S (грн)= В*Ц (грн). (2.11)
де S – собівартість нової розробки, яка оцінюється приблизним способом;
В – коефіцієнт, який враховує витрати на розробку, придбання, транспортування, монтаж, налагодження тощо нової розробки, В ![]() 1,1 ÷ 1,8;
1,1 ÷ 1,8;
А – коефіцієнт, який враховує прогнозований прибуток, податки, які повинен виплатити виробник тощо, А ![]() 1,5 ÷ 2;
1,5 ÷ 2;
Ц – ціна реалізації нової розробки, якщо вона визначена раніше, грн..
К1 = 1,6 · 2 · 2000 = 6400 (грн.)
К2 = 1,4 · 2 · 2036,73 = 5702,84 (грн)
2.5.3 Прогнозування величини експлуатаційних витрат
Розрахуємо експлуатаційні витрати для аналога та нової розробки за формулою:
Е = k × Ц × b = k × A × S × b (грн/рік), (2.12)
де Ц - ціна реалізації нової розробки, якщо вона визначена раніше, грн./шт., k-коефіцієнт, який ураховує витрати на амортизацію, електроенергію, обслуговування, ремонт тощо. Рекомендується приймати значення k = (0,2¸0,4). Для обчислювальної техніки значення k рекомендується приймати по максимуму. А - коефіцієнт, який враховує прогнозований прибуток, податки, які повинен виплачувати виробник тощо; А » 1,5 ¸ 2, S - собівартість нової розробки, грн., яка оцінювалася вище;
b - доля часу, який витрачає працівник на обслуговування вибору в загальному часі своєї роботи.
Е1 = 0,4 × 2 × 2000 × 0,6 = 960 (грн/рік)
Е2 = 0,4 × 2 × 2036,73 × 0,6 = 977,63 (грн/рік)
Якщо К1 = 6400 грн., К2 = 5702,84 грн. то співвідношення між аналогом та новою розробкою по капітальних вкладеннях – К1 > К2. Якщо Е1 = 960 грн/рік, Е2 = 977,63 грн/рік, то співвідношення між аналогом та новою розробкою по експлуатаційних витратах – Е1 < Е2. Як можна побачити, при впровадженні нової технічної розробки підприємство буде мати економію коштів по капітальних вкладеннях та експлуатаційних витратах у розмірі:
Кеф = 6400 – 5702,84 = 697,16 (грн).
Ееф = 960-977,63 = - 17,63 (грн/рік).
Такий варіант свідчить про абсолютну економію як на питомих капіталовкладеннях, так і на експлуатаційних витратах, тобто кращою буде нова розробка, що свідчить про доцільність проектування та впровадження її в виробництво.
3 Розробка структурної схеми комп’ютеризованої вимірювальної системи параметрів електричних машин з газомагнітним підвісом
До складу розробляємого пристрою входить первинний тахометричний перетворювач. Як було вказано у попередньому розділі, цей ТП буде мати аналоговий вихідний сигнал, прямопропорційний куту повороту. Шляхом обчислення його першої похідної визначається кутова швидкість.
Аналогові диференціюючі пристрої мають велику похибку та вузький частотний діапазон, що не може задовольнити вимоги технічного завдання. Тому необхідно використати цифрове диференціювання вихідного сигналу ТП. Існують три види цифрового диференціювання [16]:
перший тип - це дискретний диференціатор з усередненням. Принцип його дії полягає у відніманні через однакові інтервали часу миттєвих значень вхідного сигналу. Сигнал на виході диференціатора першого типу описується виразом:
![]() (3.1)
(3.1)
де ![]() - інтервал дискретності;
- інтервал дискретності;
другий тип - це дискретний диференціатор з осередненням. У цьому диференціаторі віднімаються через однакові інтервали часу попередньо проінтегровані на цих інтервалах значення вхідного сигналу. Сигнал на виході диференціатора другого типу:
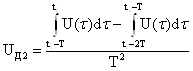 , (3.2)
, (3.2)
цифровий диференціатор третього типу - це диференціатор з усередненням на частині інтервалу. У ньому віднімаються через однакові інтервали часу попередньо проінтегровані на частині цих інтервалів значення вхідного сигналу. Вихідний сигнал описується виразом
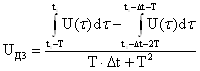 , (3.3)
, (3.3)
Імпульсні характеристики диференціаторів першого, другого та третього типів описуються відповідно виразами
![]() , (3.4)
, (3.4)
![]() , (3.5)
, (3.5)
![]() , (3.6)
, (3.6)
де ![]() - дельта-функція Дирака,
- дельта-функція Дирака,
![]()
Провівши пряме перетворення Фур’є від імпульсних характеристик та відокремивши дійсну та мниму частини отримуємо частотні та фазові характеристики диференціаторів. Для диференціатора першого типу:
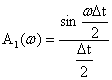 , (3.7)
, (3.7)
![]() . (3.8)
. (3.8)
Для диференціаторів другого типу:
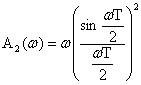 , (3.9)
, (3.9)
![]() . (3.10)
. (3.10)
Для диференціаторів третього типу
 , (3.11)
, (3.11)
![]() . (3.12)
. (3.12)
Вибір одного з цих трьох видів залежить від конкретного випадку, але кожен з них обумовлює необхідність використання аналого-цифрового перетворювача.
Розробляємий пристрій призначений для високоточного вимірювання та контролю кутової швидкості та інших параметрів руху ЕМПЕ у динамічному режимі. Тобто він повинен працювати як в режимі реального часу так і обчислювати залежності кутової швидкості, кутового прискорення, кута повороту валу від часу. Це обумовлює необхідність реалізації пристрою на основі персональної ЕОМ.
Таким чином, пристрій буде складатись з двох структурних блоків:
- тахометричного перетворювача;
- блоку спряження тахометричного перетворювача з ПЕОМ.
Для узгодження роботи аналого-цифрового перетворювача та мікропроцесора ПЕОМ необхідно використати порт уведення-виведення та схему його ініціалізації.
Для запуску аналого-цифрового перетворювача використовується генератор з кварцевою стабілізацією частоти. При відомому періоді частоти цього генератору можливе вимірювання залежностей параметрів руху від часу, не проводячи сумісних вимірювань часу.
Данні та керуючі сигнали порту уведення-виведення передаються на системну шину та ОЗУ ПЕОМ. Після проведення вимірювань здійснюється контроль середнього значення кутової швидкості.
Структурну схему розробляємого пристрою наведено на рис. 3.1 та у графічній частині дипломного проекту.
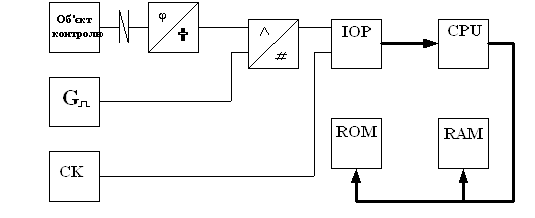
Рисунок 3.1 – Схема електрична структурна пристрою контролю середнього значення кутової швидкості
0 комментариев