Общие технические требования к НКУ
Система типовых конструкций НКУ
Выбор сечений и типов проводов и шин. Конструирование электрического монтажа
Конструирование НКУ
Уплотнение оболочек
ГОСТ 2.102-68 Виды и комплектность КД
ГОСТ 2.119-73 Эскизный проект
Требования к текстовым документам, содержащим, в основном, сплошной текст
Требования к оформлению титульного листа и листа утверждения
Групповые и базовые КД
Построение схемы
Текстовая информация
ГОСТ 2.722 – 68 УГО. Машины электрические
ГОСТ 2.756 – 76 УГО. Воспринимающая часть электромеханических устройств
ГОСТ 2.730 –73 УГО. Приборы полупроводниковые
ГОСТ 2.702 -75; 2.703 - 68; 2.704 – 76 Правила выполнения лектрических, кинематических, гидравлических и пневматических схем
ЭЛЕКТРОПРИВОД КАНАТНОЙ ДОРОГИ МАЯТНИКОВОГО ТИПА
Навигация
ЭЛЕКТРОПРИВОД КАНАТНОЙ ДОРОГИ МАЯТНИКОВОГО ТИПА
Конструирование электропривода
105632
знака
12
таблиц
4
изображения
3. ЭЛЕКТРОПРИВОД КАНАТНОЙ ДОРОГИ МАЯТНИКОВОГО ТИПА
Маятниковая канатная дорога оборудуется двумя кабинами, совершающими встречные возвратно-поступательные перемещения с остановками крайних положениях на трассе для загрузки и выгрузки. Кабины перемещаются на роликах-подвесниках по несущим стальным канатам, которые крепятся в отдельных точках к удерживающим опорам, расположенным вдоль трассы дороги. Тяговое усилие создается приводной станцией и передается кабинам бесконечным тянущим канатом. Натяжение тянущих и тяговых канатов осуществляется натяжной станцией с помощью специальных грузов.
По характеру рабочих движений маятниковая канатная дорога вполне аналогична двухконцевой шахтной подъемной установке, но с существенно большей продолжительностью цикла, которая при протяженной многокилометровой трассе может значительно превышать 10 мин. При этом длительность переходных процессов пуска и торможения в общем времени цикла составляет незначительную долю. По назначению, конструкции и по характеру статиических нагрузок электропривода маятниковая канатная дорога имеет много общего с кольцевой канатной дорогой непрерывного действия.
Необходимость весьма плавного пуска и торможения электропривода, обусловленая значительной податливостью тянущих канатов и условиями транспортировки пассажиров в подвесных кабинах, а также требование точной остановки определили преимущественное применение для пассажирских канатных дорог маятникового типа системы Г-Д.
Двухкабинная пассажирская канатная дорога имеет следующие технические данные:
Протяженность, м………4860
Высота подъема, м………..1400
Грузоподъемность кабины, чел. ………………26
Максимальная скорость движения, м/с……….8
Мощность приводного двигателя, кВт………110
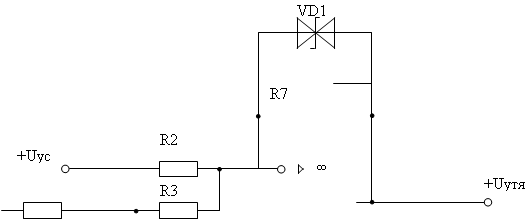
Генератор Г питающий якорную цепь двигателя Д, возбуждается от трехобмоточного управляемого возбудителя В. В схеме предусмотрены три отрицательные обратные связи: по скорости, которая электрически суммируется с задающим сигналом и обеспечивает стабилизацию скорости в условиях изменяющейся вдоль трассы движения статической нагрузки, зависящей от угла наклона опорных канатов; по напряжению возбуждения генератора, которая содержит составляющую гибкой отрицательной обратной связи по ЭДС генератора, благодаря чему оказывает демпфирующее влияние при упругих колебаниях тянущего каната; и, наконец, по току якоря с отсечкой.
Требуемый тип изменения скорости при разгоне и замедлении кабиныдостигается соответствующим изменением задающего напряжения, получаемого с контроллерного регулятора КР. Контроллерный регулятор имеет 80 ступеней, что обеспечивает возможность плавного изменения скорости. Процессом пуска управляет машинист путем вращения штурвала контроллерного регулятора с пульта управления станции. Процесс замедления происходит автоматически. Ось регулятора через так называемое ретордирующее устройство механически связана с осью отклоняющего шкива, угол поворота которого пропорционален пути кабины. При подходе кабины к станции один из дисков ретордирующего устройства своим профилированным выступом заставляет поворачиваться по требуемому закону ось КР, а вместе с ней и ползунок регулятора, ставя его в конце замедления в нулевое положение. После отработки пути торможения один из конечных выключателей КВВ или КВН, контролирующих положение кабины, отключает цепь контактора направления движения КВ или КН. При этом накладываются механические тормоза и кабина полностью останавливается. Обмотка возбуждения генератора отключается от возбудителя и подключается к якорю генератора для гошения остаточного поля.
Как установка предназначенная для транспортировки людей, канатная дорога предъявляет повышенные требования к надежности работы электрического и механического оборудования. На случай перерыва электроснабжения приводная станция оборудована резервным синхронным генератором мощностью 160 кВт, который приводится во вращение дизельным мотором. Исправное состояние электрического и механического оборудования контролируется в схеме следующими блокировками и защитами: от превышения скорости – центробежное реле РЦ; от обрыва канатов – контакты К1 и К2; от переезда допустимого пути на станциях – аварийные конечные выключатели КВА1 и КВА2; от перегрузки двигателя – реле РП, действующее на отключение через выдержку времени 20-30 с, которая обеспечивается реле времени РВ1 и РВ2; от максимального тока – реле РМ; от потери возбуждения двигателя – реле обрыва поля РОП. В приведенной несколько упрощенной схеме не показаны защитные блокировки, контролирующие исправность вспомогательных агрегатов, и система сигнализации. При действии любой из перечисленных защит вступают в действие пневматические тормоза: рабочий на валу двигателя и предохранительный на валу приводного шкива.Для повышения безопасности работы канатной дороги ее остановка возможна и из кабины. При этом целью для сигналов управления служат канаты. Тянущий канат изолируется от земли, а несущий – заземляется. Для связи кабины со станцией имеется телефон, действующий также через канаты, и коротковолновая радиосвязь.
ЗАКЛЮЧЕНИЕ
Курсовая работа включает в себя основные виды работ, которые выполняют проектные организации на стадии эскизно-технического проектирования. Курсовая работа закрепляет теоретические знания студентов, полученные по соответствующему курсу, знакомит их с основными видами проектных работ, которые выполняются на практике и требованиями к выполнению проектной документации в соответствии с ЕСКД. В процессе выполнения данной курсовой работы студент усовершенствует свои навыки в пользовании научно технической литературой, стандартами и отраслевой нормативно-технической документацией.
СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ
1.Елисеев В.А., Шинянский А.В. Справочник по автоматизированному электроприводу: Учебник для вузов. - М.: Энергоатомиздат, 1983.
2. Ключев В.И., Терехов В.М. Электропривод и автоматизация общепромышленных механизмов: Учебник для вузов. - М.: Энергия, 1980.
3. Сборник ГОСТов системы ЕСКД.
4. Семенов А.А. Методические указания по выполнению курсовой работы для студентов «Электротехника, электромеханика, электротехнологии» дневного отделения.
5. Ходнев В.В. Комплектные управляющие устройства электропривода. – М.: Энергоатомиздат, 1986.
Похожие работы
... от переподъемов, нулевую и максимальную защиты. - предусматривать остановку сосудов в промежуточных точках ствола. световую сигнализацию о режимах работы подъемной установки в здании подъемной машины, у оператора загрузочного устройства, у диспетчера. Современные регулируемые электроприводы постоянного тока для автоматизированных подъемных установок выполняют на основе двигателей постоянного ...
... при механических, климатических и специальных воздействиях окружающей среды; - специальные требования по защите информации. Построение «автоматизированной системы информационной поддержки наладочных работ электропривода» Дано: 1 Объект информатизации 2 Ограничения 3 Критерий 4 База данных 5 Классификатор характеристик 6 Пакет программ ...
... с короткозамкнутым ротором (КЗР) с характеристиками, не уступающим характеристикам двигателей постоянного тока (ДПТ). 3. СПЕЦИАЛЬНАЯ ЧАСТЬ. 3.1 Требования к электроприводу скребкового конвейера применительно к условиям данного цеха. При проектирование электрооборудования и устройств автоматики следует учесть что, цех РОЦ ...
... При разработке конструкции блока управления необходимо учитывать ряд факторов, влияющих на конструктивное исполнение блока. Будем считать, что плата модуля управления входит в общий блок системы управления, т.е. является отдельным её модулем. Модуль управления вставляется в общий блок по направляющим, позволяющим точно совместить разъём с ответной частью. Для удобства монтажа на передней панели ...
0 комментариев