Навигация
МОСКОВСКИЙ ГОСУДАРСТЕННЫЙ ОТКРЫТЫЙ
УНИВЕРСИТЕТ
Курсовая работа по дисциплине
Аналоговые измерительные приборы на тему:
ПРИБОР КСМ3-ПИ1000
Выполнил:
Проверил:
2001 г.
Содержание.
1. Автоматические мосты для измерения температуры
2. Медные термометры сопротивления ТСМ2.1 Назначение
2.2 Технические данные
2.3 Принцип действия и устройство
3. Мосты с искробезопасной измерительной схемой КСМ3-ПИ1000
3.1 Назначение
3.2 Технические данные
3.3 Устройство и принцип работы
3.3.1 Электрическая функциональная схема автоматического уравновешенного моста
3.3.2 Схема электрическая принципиальная уравновешивающего моста
3.3.3 Обеспечение искробезопасности
3.4 Конструкция прибора
3.4.1 Усилитель
3.4.2 Реверсивный электродвигатель
3.4.3 Измерительный блок
3.4.4 Привод диаграммного диска
3.4.5 Устройство записи
3.5 Порядок установки
4. Усилитель У2-01-01
4.1 Устройство
4.2 Усилитель предварительный (УП) Б-13.611.63-02
4.3 Усилитель оконечный (УО) Б-13.611.65-01
4.4 Выпрямитель Б-15.635.754.5 Прерыватель б-15.635.76
5. Использованная литература
1. Автоматические мосты для измерения температуры.
Уравновешенные автоматические мосты предназначены для измерения, записи и регулирования электрических и неэлектрических величин, связанных функциональной зависимостью с активным сопротивлением.
Широко распространены автоматические мосты для измерения и записи температуры, работающие в комплекте с терморезистором (рис. 1)
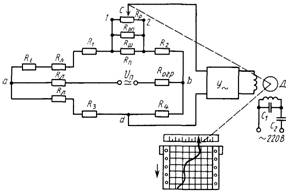
Рис. 1. Принципиальная схема автоматического моста для измерения температуры.
В автоматических уравновешенных мостах используется четырехплечная мостовая схема. На рис. 1 обозначены R1, R2, R3, R4 – сопротивления плеч моста; Rt – терморезистор; Rл – сопротивление линии (место измерения температуры может находиться на значительном расстоянии от прибора); Rрп – полное сопротивление реохорда; Rп – сопротивление, определяемое пределом измерения моста; Uп – напряжение источника питания; Rогр – сопротивление, ограничивающее ток в плечах мостовой схемы.
К основным свойствам схемы автоматического уравновешенного моста, показанной на рис. 1, относятся: высокая чувствительность; компенсация влияния температурных изменений сопротивлений соединительных проводов (Rл); возможность расширения пределов измерения шунтированием реохорда сопротивлением Rп (без потери линейности шкалы).
Чувствительность автоматического уравновешенного моста ,
, ![]() (1)
(1)
∆Uм – напряжение на выходе измерительной схемы моста при изменении температуры на ∆t0; tп – предел измерения по температуре (tп=tmax-tmin); γ - относительная приведенная погрешность измерений.
Уравнение шкалы автоматического моста можно получить на основании условий равновесия мостовой схемы для двух случаев (для упрощения рассматриваем измерительную схему автоматического моста без сопротивлений Rш и Rп): t=tmin и t=tmin+Δt, т.е. Rt=Rtmin (движок реохорда в точке 2) и Rt=Rtmin+ΔRt= Rtmin+ βtRtmin Δt , где βt – температурный коэфициент сопротивления материала термометра.
Определим эти условия:
(Rtmin+Rл+R1+Rрп)∙R4=R2∙(R3+Rл), (2)
(Rtmin+ ΔRt+Rл+Rрп - Rр)∙R4=(R2+Rр)∙(R3+Rл). (3)
Вычитая из уравнения (3) уравнение (2), получаем следующее выражение:
(ΔRt - Rр)∙R4=Rр∙(R3+Rл).
отсюда
Rр=ΔRt∙R4/(R3+R4+Rл)=βt∙Rtmin∙R4∙Δt/(R3+R4+Rл). (4)
Уравнение шкалы прибора можно записать в таком виде:
l=lп∙Rр/Rрп=(lп/Rрп)∙(βt∙Rtmin∙R4/( R3+R4+Rл))∙Δt=c∙Δt; (5)
с≡(lп/Rрп)∙(βt∙Rtmin∙R4/( R3+R4+Rл)), где lп – полная длина реохорда.
Полученное выражение (5) свидетельствует о том, что шкала прибора линейна. Изменение сопротивления соединительных проводов (ΔRл), которое может быть вызвано изменением температуры окружающей среды, не оказывает существенного влияния на показания прибора благодаря трехпроводной схеме включения терморезистора. Покажем это.
Равновесное состояние схемы для некоторого сопротивления терморезисторов Rt и сопротивления линии Rл определяется соотношением
(Rt+Rл+R1+Rрп - Rр)∙R4=(R2+Rр)∙(R3+Rл). (6)
если предположить, что сопротивление соединительных проводов изменилось на ΔRл, то показания автоматического моста останутся неизменными, если будет выполняться условие
(Rt+Rл+ΔRл+R1+Rрп - Rр)∙R4=(R2+Rр)∙(R3+Rл+ΔRл). (7)
вычитая из (7) выражение (6), получим
ΔRл∙R4=(R2+Rр)∙ΔRл, т.е. R4=R2+Rр. (8)
В процессе измерений Rр изменяется, поэтому полная компенсация влияния ΔRл возможна для одной точки шкалы, для которой выполняется условие (8). Целесообразно выполнение этого условия для середины шкалы. Тогда погрешность, вызванная изменениями сопротивлений соединительных проводов, для всей шкалы прибора незначительна.
В этом случае выбор сопротивления определяется соотношением
R4=R2+Rрп/2. (9)
При градуировке сопротивление каждого из соединительных проводов предполагается равным 2.5 Ом. Для их подгонки до расчетного значения служат специальные уравнительные катушки.
Автоматические мосты, выполненные по схеме рис. 1, имеют уменьшенное влияние внешних наводок (третий соединительный провод входит в диагональ источника питания, а не в усилитель).
Самонагрев термометра устраняется соответствующим выбором Rогр (для устранения погрешности от самонагрева ток в термометре не должен превышать 7 – 8 мА). Нестабильность переходного сопротивления контакта движка реохорда не вносит погрешности в измерения, так как оно включено последовательно с большим по величине входным сопротивлением усилителя. Термо- и контактная ЭДС устраняются при питании схемы моста переменным напряжением.
2. Медные термометры сопротивления ТСМ.
2.1 Назначение.
Термометры сопротивления ТСМ предназначены для измерения температуры жидких и газообразных сред в промышленных условиях. Термометры сопротивления работают в комплекте с логометрами или автоматическими мостами.2.2 Технические данные.
Температурные пределы измерения от –50 до +1000С.
Градуировка: гр. 23.
Конструкция головки: для ТСМ-Х, ТСМ-XII и ТСМ-XIV обыкновенная; ТСМ-XI – без головки с кабельным выводом марки СРГ; ТСМ-239 – с брызгонепроницаемым штепсельным разъемом и проводом РПШЭ.
Устойчивость к механическим воздействиям: для ТСМ-Х, ТСМ-XII, ТСМ-XIV и ТСМ-XI – обыкновенная, для ТСМ-239 – вибротряскоустойчивые и ударопрочные.
Инерционность термометров сопротивления большая.
Термометры с неподвижным штуцером, ТСМ-XIV – с подвижным штуцером.
0 комментариев