Условия самовозбуждения
К.П.Д. магнетрона
Рабочие и нагрузочные характеристики магнетронов
Конструирования магнетронов
ТЕХНИЧЕСКАЯ ЧАСТЬ
Режимы работы радиолокатора "Гроза"
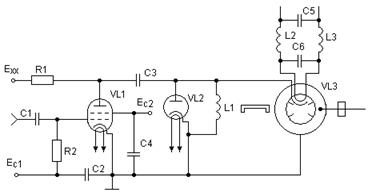
Основной приёмно-передающий блок
ОСНОВНЫЕ ПОЛОЖЕНИЯ ТЕОРИИ БЕЗОПАСНОСТИ ПОЛЕТОВ
Составление оптимального алгоритма поиска места отказа
Совокупность ДП и алгоритмов диагностирования
Издержки на оплату услуг сторонних организаций
Инвестиции, необходимые для реализации проекта (Invest)
Срок окупаемости инвестиций (tok)
Индекс доходности (ИД)
Навигация
Составление оптимального алгоритма поиска места отказа
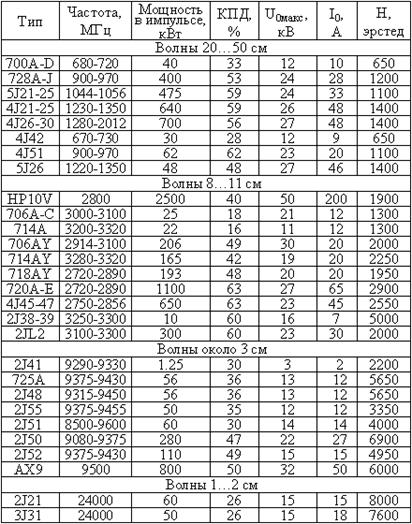
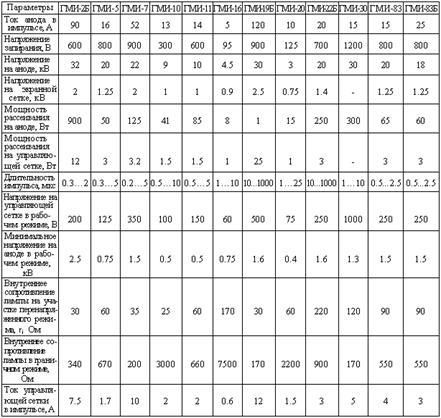
Применение магнетронных генераторов большей мощности в радиолокационных системах
146279
знаков
15
таблиц
39
изображений
4.2 Составление оптимального алгоритма поиска места отказа
Поиск места отказа (ПМО) производится после установления факта неработоспособного состояния изделия РЭО, что принимается в качестве достоверного события ![]() . Определение части изделия, отказ которой приводит к возникновению состояния неработоспособности, называется поиском места отказа. Физически отказ РЭС сопровождается или прекращением функционирования (явный отказ), или выходом параметра за пределы допусков(неявный отказ).
. Определение части изделия, отказ которой приводит к возникновению состояния неработоспособности, называется поиском места отказа. Физически отказ РЭС сопровождается или прекращением функционирования (явный отказ), или выходом параметра за пределы допусков(неявный отказ).
Локализация отказа частично происходит при фиксации неработоспособного состояния. Однако почти всегда ПМО и восстановление работоспособного состояния изделий РЭО (т. е. текущий ремонт) осуществляется в цехе А и РЭО АТБ. Причем поиск места отказа осуществляется в несколько этапов:
- определение неработоспособного состояния РЭС;
- определение отказавшего блока (РЭУ) с точностью до сменной сборочной единицы;
- поиск места отказа с точностью до отказавшего восстанавливаемого или заменяемого электроэлемента;
- восстановление отказавшего блока (РЭУ);
- восстановление отказавшей РЭС.
Неопределенность ситуаций при ПМО оказывается значительно выше, чем при контроле работоспособности.
Алгоритмы ПМО делятся на две большие группы: "негибкие" и "гибкие" алгоритмы.
Негибкие алгоритмы реализуют жесткие программы ПМО, использующие априорные данные о техническом состоянии изделия РЭО, полученные расчетным путем или на основе статистической обработки информации об отказах устройств-аналогов.
Гибкие алгоритмы, помимо априорной, используют апостериорную информацию, получаемую в результате проверок технического состояния РЭУ. входящих в РЭС. Операции поиска меняются в зависимости от места возникновения отказа. При возникновении отказа в конкретной точке данного РЭУ "мягкий" алгоритм будет всегда одним и тем же, так как он составляется путем минимизации затрат по выбранному заранее критерию.
Органолептические методы ПМО составляют группу, в основе которой лежат различные (трудно классифицируемые) факторы;
- совокупность параметров полезных и сопутствующих сигналов;
- активные признаки нормальной работы отдельных частей на основе постоянно функционирующих датчиков и контрольных сигнализаторов;
- пассивные признаки, сопровождающие работу системы, например тепловые режимы отдельных изолированных блоков.
Совокупности признаков характерных отказов и их проявлений, присущих данной системе, обычно в виде специальных таблиц включают в технические описания или инструкции по ТО РЭО и руководствуются ими в процессе технического диагностирования.
Перечни характерных неисправностей и их проявлений содержатся также в таких документах, как технологические указания по выполнению регламентных работ различных видов РЭС в лабораториях ремонтных предприятий отраслевого профиля.
Группа методов ПМО с использованием статистических данных основана на предварительном сборе и обработке информации об отказах РЭУ, отдельных блоков, изучении априорных данных о характерных повреждениях и дефектах аналогичных изделий и их составляющих. На основании проработки статистического материала формируется алгоритм последовательного ПМО.
Метод "время-безотказность" - один из путей составления алгоритма, заключающийся в следующем. Если известны вероятности отказов ![]() всех диагностируемых блоков РЭС, а также
всех диагностируемых блоков РЭС, а также ![]() - среднее время диагностирования каждого блока в процессе ПМО, то принцип ранжировки проверок при ПМО следующий: для каждого блока находим отношение
- среднее время диагностирования каждого блока в процессе ПМО, то принцип ранжировки проверок при ПМО следующий: для каждого блока находим отношение ![]() /
/![]() , строим алгоритм по принципу
, строим алгоритм по принципу ![]() …
…![]() . При реализации этого алгоритма среднее время диагностирования системы оказывается минимальным.
. При реализации этого алгоритма среднее время диагностирования системы оказывается минимальным.
Оптимальный алгоритм ПМО на основе информационного подхода составляется следующим образом. По ФДМ РЭО, для которого формируется алгоритм, строится матрица состояний (проверки ![]() - строки, состояния
- строки, состояния ![]() - столбцы). Под каждым значением
- столбцы). Под каждым значением ![]() указывается его нормированное значение
указывается его нормированное значение ![]() ;
; ![]() . При отсутствии сведений о безотказности состояния
. При отсутствии сведений о безотказности состояния ![]() принимаются равновероятными.
принимаются равновероятными.
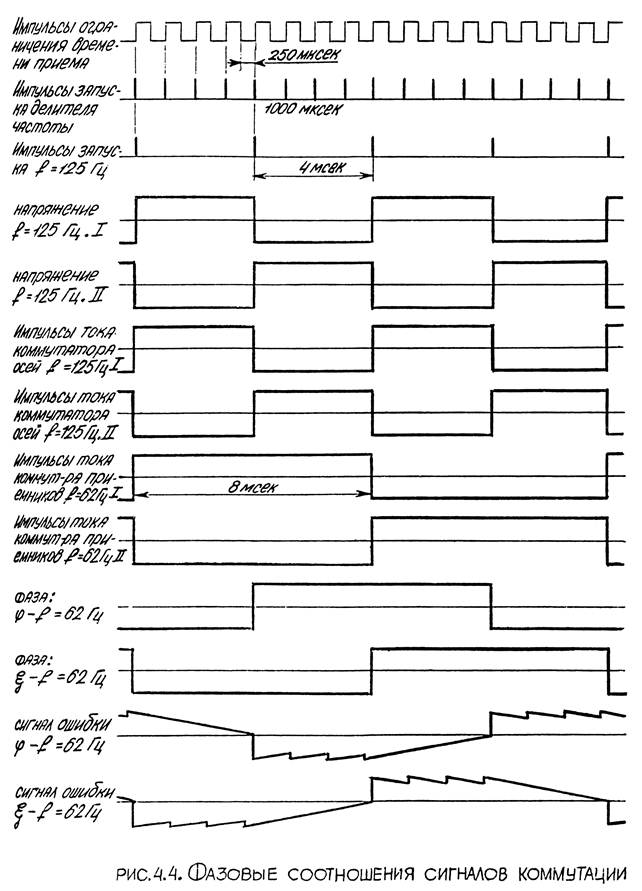
Функция предпочтения для каждой строки ![]()
![]() (рис. 4.4);
(рис. 4.4);
![]()
Где ![]() - число единиц в строке, умноженное на соответствующие вероятности состояний;
- число единиц в строке, умноженное на соответствующие вероятности состояний; ![]() - число нулей в той же строке.
- число нулей в той же строке.
В качестве первой проверки выбирается та, для которой функция предпочтения ![]() , т. е. имеет наименьшее значение. Далее проверки идут по двум почти равноинформативным ветвям. Для результата
, т. е. имеет наименьшее значение. Далее проверки идут по двум почти равноинформативным ветвям. Для результата ![]() строим новую матрицу, в которую попадают состояния
строим новую матрицу, в которую попадают состояния ![]() , соответствовавшие единице. Дли этой матрицы также следует вычисление функции предпочтения
, соответствовавшие единице. Дли этой матрицы также следует вычисление функции предпочтения
![]() ,
,
и процедура повторяется до получения однозначного ответа по каждому элементу блока ветви.
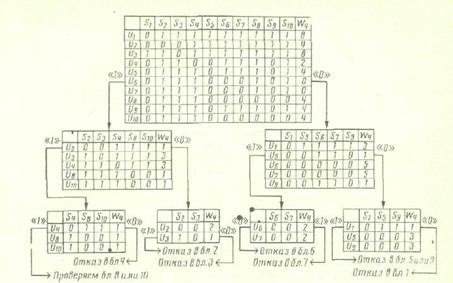
Рисунок 4.4 - Составление оптимального алгоритма поискаместа отказа
Для результата проверки ![]() также строится соответствующая матрица, в которой принимают участие состояния
также строится соответствующая матрица, в которой принимают участие состояния ![]() с результатом проверки, равным "нулю". Для всех строк этой матрицы также вычисляют функции предпочтения по вышеприведенной формуле, и следующая проверка выбирается по
с результатом проверки, равным "нулю". Для всех строк этой матрицы также вычисляют функции предпочтения по вышеприведенной формуле, и следующая проверка выбирается по ![]() . Процедура повторяется вновь.
. Процедура повторяется вновь.
При необходимости данный алгоритм может быть построен с учетом стоимости диагностирования (напомним, что под стоимостью можно понимать затраты любого рода, в том числе и временные).
Функция предпочтения при учете стоимости ![]() и достоверности
и достоверности ![]() имеет вид:
имеет вид:
![]() ,
,
а процедура построения алгоритма ПМО остается одной и той же.

Рисунок 4.5 - Алгоритм диагностирования методом половинных разбиений
Метод половинных разбиений на практике для ПМО широко используется, особенно при наличии последовательной (пли близкой к таковой) структуры. В схеме отказавшего РЭУ находят среднюю точку (средний блок) с учетом или без учета вероятности отказа, проверяют состояние изделия в этой точке, после чего в зависимости от результата проверяется правая или левая часть схемы.
![]()
![]()
![]()
Похожие работы
... функционально-узлового метода конструирования, повышающего надёжность аппаратуры и её качественные показатели; широкое применение цифровых устройств. В данной курсовой работе предлагается спроектировать импульсный передатчик для наземной радиолокационной станции. Радиолокация решает задачи обнаружения, определения координат и параметров движения различных объектов с помощью отражения или ...
... обзора земли с целью обеспечения возможности автономной навигации по характерным наземным радиолокационным ориентирам. 3. Обоснование, выбор и расчет тактико-технических характеристик радиолокационной станции 3.1. Обоснование, выбор и расчет тактических характеристик РЛС 3.1.1. Максимальная дальность действия RmaxМаксимальная дальность действия задается тактическими требованиями и зависит ...
... техническому совершенству, боевым и эксплуатационным качествам не уступали лучшим зарубежным образцам, а нередко и превосходили их. Большинство из созданных в эти годы образцов в большей или меньшей степени представляли собой высокоточное оружие. В них использовались высокоточные инерциальные системы, системы коррекции и телеуправления движением на траектории и системы самонаведения на конечном ...
... систем в РЛГС четыре: 3.2.1 Радиолокационная часть РЛГС Радиолокационная часть РЛГС состоит из: · передатчика. · приемника. · высоковольтного выпрямителя. · высокочастотной части антенны. Радиолокационная часть РЛГС предназначена: · для генерирования высокочастотной электромагнитной энергии заданной частоты (f±2,5%) и мощности 60 Вт, которая в виде коротких ...
0 комментариев