Навигация
Разработка устройства логического управления
26469
знаков
9
таблиц
8
изображений
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
КУРСОВАЯ РАБОТА
по дисциплине
«Элементы систем автоматики»
“Разработка устройства логического управления ”
Содержание
1.Введение
2.Структурный синтез управляющего автомата
2.1 Построение направленного графа абстрактного автомата
2.2 Кодирование внутренних состояний и выбор типа памяти
2.3 Определение логических функций возбуждения памяти.
2.4 Составление таблицы траекторий.
2.5 Выбор элементов и микросхем.
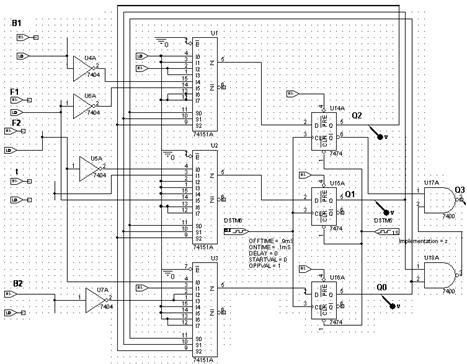
2.6 Составление модели в OrCAD на основе полученных упрощенных выражений и проверка правильности работы модели
2.7 Результаты моделирования схемы автомата.
3. Выбор аналоговых элементов
3.1 Датчик индукции.
4. Выбор схем, реализующих заданные передаточные функции, вспомогательные функции и реализация коммутаций устройств со схемой автомата Мура
4.1 Таймер
4.2 Тактовый генератор
4.3 Устройство начального пуска
4.4 Устройство реализации функции F1
4.5 Устройство реализации функции F2
4.5 Устройство индикации
4.6 Разработка устройств реализующих В1, В2.
5 Устройства сопряжения
5.1 Согласование электролампы с выходом автомата.
5.2 Устройства сопряжения и нормализация шкалы датчика
5.3. Устройства опорного напряжения
6. Возвращение разряда.
7. Устройство коммутации с внешними элементами.
8. Заключение.
1.Введение
Современное промышленное производство является сложным комплексным процессом, который требует быстрого и многомерного контроля за всеми параметрами. Такой контроль был бы невозможен без применения современной электронной техники и автоматики вследствие того, что существуют многочисленные физические явления недоступные для простого визуального контроля. В настоящее время промышленная автоматика развивается значительными темпами, что связано с постоянно повышающимся уровнем сложности и качества технологических процессов. Электронные промышленные устройства являются сложными системами, в состав которых входят энергетические преобразователи, элементы электропривода, микропроцессорные узлы обработки информации и связи с внешними управляющими объектами, а также датчики различного назначения, устройства согласования с объектом управления. Очевидно, что задача разработки промышленного автомата включает в себя комплекс проблем, которые сами по себе представляют отдельную область современной электроники. Важно обеспечить высокую надежность и защиту от сбоев, поскольку существуют технологические процессы, нарушение которых может привести к катастрофическим последствиям опасным для жизни людей и окружающей среды. Поэтому создание таких устройств требует от разработчика хороших знаний в области электроники и в области технологических процессов, для управления которыми создается промышленный автомат.
Целью данного курсового проекта является разработка электронного автомата при заданных входных сигналах и контролируемых параметрах, а также исполнительных устройствах. Курсовой проект предусматривает решение основных задач реального инженерного проектирования электронной техники: структурный синтез, разработку принципиальной схемы, моделирование основных функциональных узлов, конструирование. Функционирование автомата производится по приведенному в задании алгоритму.
2.Структурный синтез управляющего автомата
2.1 Построение направленного графа абстрактного автомата
На этапе проектирования цифрового автомата выбираем синхронный автомат Мура. Выбор асинхронного автомата был бы осложнен необходимостью устранения эффекта “гонок”, а выбор синхронного автомата Мили – усложнением комбинационно-логического устройства.
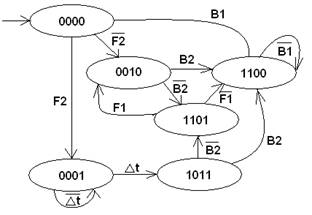
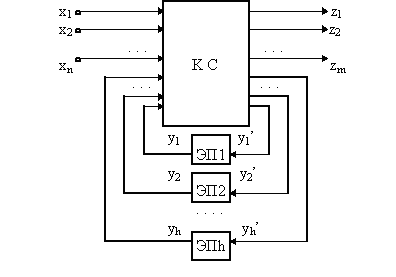
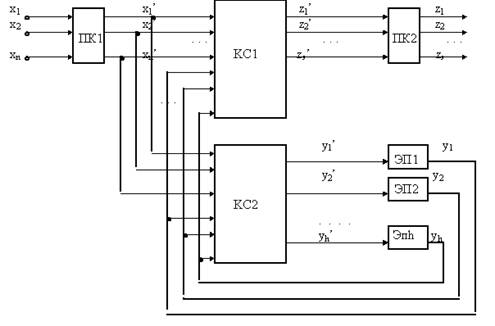
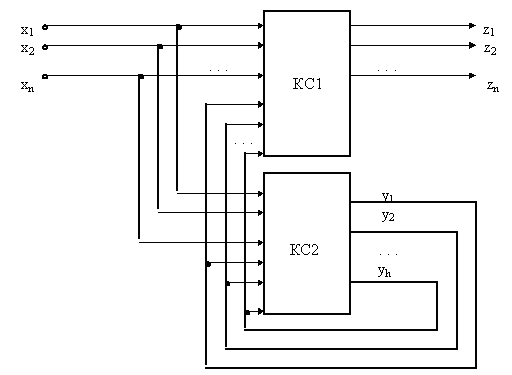
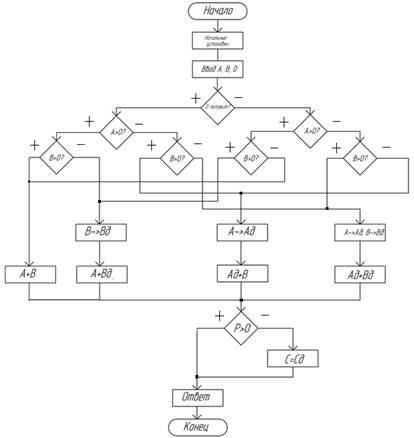
Автомат Мура состоит из комбинационно-логического устройства (КЛУ) и триггерной подсистемы. КЛУ формирует логическую функцию переходов, т.е. определяет, каким образом автомат переходит в следующее состояние. При этом учитывается текущее состояние, код которого хранится в триггерной подсистеме. При построении направленного графа автомата Мура операторные вершины граф-схемы ставятся в соответствие состояниям автомата. Переход в новое состояние осуществляется в зависимости от содержания условной вершины, следующей за операторной. Направленный граф автомата представлен на рис. 1.
Построение направленного графа автомата Мура:
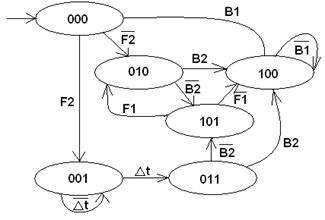
Преобразование производим так, чтобы истинное значение состояния соответствовало «1», а ложное – «0».
Таблица состояний
Таблица 1
| Q3 | Q2 | Q1 | Q0 | Y |
| 1 | 0 | 0 | 1 | 1 |
| 0 | 0 | 1 | 0 | 2 |
| 1 | 0 | 1 | 1 | 3 |
| 0 | 1 | 0 | 0 | 4 |
| 1 | 1 | 0 | 1 | 5 |
| 0 | 1 | 1 | 0 | 6 |
Учитывая:
0=000
1=001
2=010
3=011
4=100
5=101
6=110
Убираем старший разряд и получаем:
Таблица 2
| Q2 | Q1 | Q0 | Y |
| 0 | 0 | 1 | 1 |
| 0 | 1 | 0 | 2 |
| 0 | 1 | 1 | 3 |
| 1 | 0 | 0 | 4 |
| 1 | 0 | 1 | 5 |
| 1 | 1 | 0 | 6 |
Здесь использованы следующие логические условия и сигналы:
B1= b1![]() b2 B2=b1
b2 B2=b1![]() b2 ;
b2 ;
В дальнейшем используются следующие сокращения:
![]()
![]()
Сигналы:
S – сигнал контактного датчика (S=0 – контакт разомкнут, S=1 ‑ контакт замкнут); ![]() временная задержка,
временная задержка, ![]() .
.
Направленный граф автомата построен, исходя из заданного алгоритма, и имеет шесть состояний, соответствующих операторным вершинам исходного алгоритма.
Похожие работы
... параметрах, а также исполнительных устройствах. Функционирование автомата производится по приведенному в задании алгоритму. 1. Структурный синтез управляющего автомата 1.1 Построение направленного графа абстрактного автомата При проектировании устройства логического управления будем ориентироваться на синхронный дискретный автомат Мура, поскольку для асинхронного дискретного автомата ...
... шара, снабженного канавками на поверхности для создания оптимальной турбулентной струи пылевозд. смеси. 1.3 Разработка структурной схемы В данном разделе необходимо представить структурную схему (рис.1.3.1) разрабатываемого нами автоматизированного блока управления пневмокамерным насосом. Структурной называется схема, которая определяет функциональные основные части изделия и связи между ...

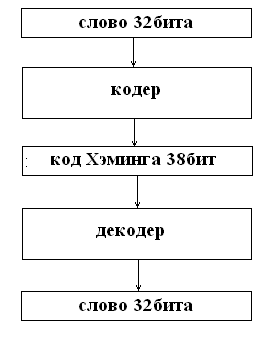
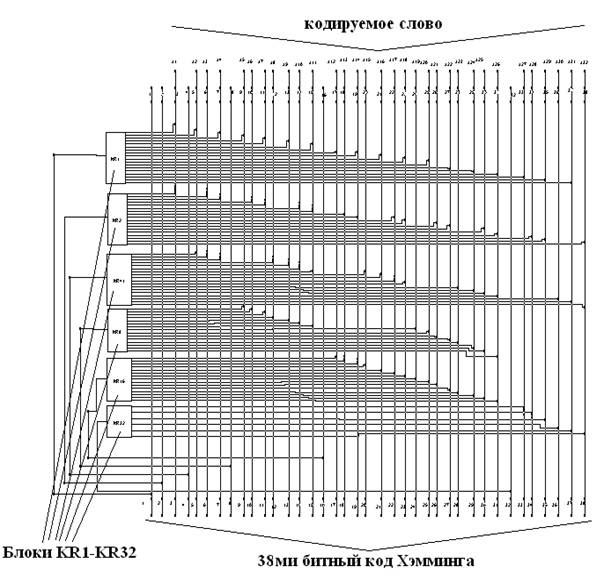
... кодирования можно разработать устройство, которое поможет понять принцип работы метода Хэмминга. Кодер – декодер будем разрабатывать на основе ИМС К555ВЖ1. 2.1 Разработка устройства кодирования информации методом Хемминга Кодер, преобразует 32х битное слово в 38ми разрядный код Хэмминга, после чего слово хранится в памяти или передаётся по шинам и т.д. В процессе передачи или хранения в ...
... переходов автомата. 3. Проектирование алгоритма и построение абстрактного автомата арифметико-логического устройства 3.1 Задание и исходные данные Разработка арифметико-логического устройства, выполняющего операцию сложения и вычитания в прямом двоичном коде. Исходные данные: – разрядность операндов – 8 бит; – разрядность результата – 8 бит; – элемент памяти – ПЗУ; – формат ...
0 комментариев