Навигация
Выбор аналоговых элементов
26469
знаков
9
таблиц
8
изображений
3. Выбор аналоговых элементов
3.1 Датчик индукции
Датчик индукции выбираем из условия, что измерения будут производиться в диапазоне -5мТ…10мТл.
Выбираем датчик SS143A .
Внешний вид датчика приведен на рис. 4.
В таблице ниже (таблица 4) приводятся характеристики и параметры датчикаиндукции, удовлетворяющего заданию курсовой работы
Таблица 4
| Характеристика | Параметры |
| Диапазон измерения магнит. индукции | от 1мТл до 21.5мТл |
| Выходное напряжение датчика | max400 В |
| Напряжение питания | Постоянное 3.8...30В |
| Диапазон рабочих температур | –40...+125°C |
| Потребляемый ток | 10мА |
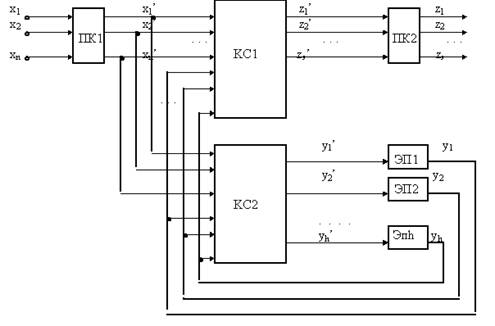
Функциональная схема линейных датчиков магнитного
поля на эффекте Холла
Линейные датчики магнитного поля (на эффекте Холла) состоят из олупроводникового элемента Холла, стабилизатора питания, дифференциального усилителя и выходного каскада (рис. 1). В зависимости от модели, выходной каскад датчика представляет собой усилитель
на биполярном транзисторе, включенном по схеме с открытым коллектором (p-n-p) или по двухтактной схеме (комплементарная пара p-n-p + n-p-n). Выходное напряжение этих датчиков находится в линейной зависимости от величины и направления вектора магнитной индукции (рис. 2).
4. Выбор схем, реализующих заданные передаточные функции, вспомогательные функции и реализация коммутаций устройств со схемой автомата Мура
4.1 Таймер
Возьмем синхронный счетчик:
Синхронные (или параллельные) счетчики характеризуются тем, что все их разряды в пределах одной микросхемы переключаются одновременно, параллельно. Это достигается существенным усложнением внутренней структуры микросхемы по сравнению с простыми асинхронными счетчиками. В результате полная задержка переключения синхронного счетчика примерно равна задержке одного триггера, то есть синхронные счетчики гораздо быстрее асинхронных, причем их быстродействие не падает с ростом количества разрядов выходного кода (конечно, до определенных пределов).
Для объединения нескольких синхронных счетчиков с целью увеличения числа их разрядов (для каскадирования) используется специальный выходной сигнал переноса.
Синхронные счетчики с асинхронным переносом занимают промежуточное положение по быстродействию между асинхронными счетчиками и полностью синхронными счетчиками. Управление их работой проще, чем у синхронных счетчиков, но сложнее, чем у асинхронных. Работают данные счетчики по положительному фронту входного сигнала (или, что то же самое, по заднему фронту отрицательного сигнала). Основная суть их работы сводится к следующему: все разряды одного счетчика переключаются одновременно, но при каскадировании каждый следующий счетчик (дающий более старшие разряды) переключается с задержкой относительно предыдущего счетчика (дающего более младшие разряды). То есть задержка переключения многоразрядного счетчика увеличивается в данном случае не с каждым новым разрядом (как у асинхронных счетчиков), а с каждой новой микросхемой (например, 4-разрядной).
Сигнал переноса у этих счетчиков при прямом счете вырабатывается тогда, когда все разряды равны единице (достигнут максимальный код) и когда приходит входной сигнал. Поэтому сигнал переноса, повторяющий входной сигнал, будет задержан относительно входного сигнала. И именно этот сигнал переноса используется в качестве входного для следующего счетчика при каскадировании. То есть входной сигнал второго счетчика задержан относительно входного сигнала первого счетчика, входной сигнал третьего счетчика задержан относительно входного сигнала второго счетчика и т.д.
Временная диаграмма 4-разрядного синхронного счетчика с асинхронным переносом показана на рис. 4,1. Из рисунка видно, что разряды переключаются одновременно по положительному фронту входного сигнала (с некоторой задержкой), а отрицательный сигнал переноса также задержан относительно входного отрицательного импульса. Понятно, что переключение разрядов счетчика, работающего с этим сигналом переноса в качестве входного, будет происходить с дополнительной задержкой относительно переключения разрядов данного счетчика.
Примерами синхронных счетчиков с асинхронным переносом могут служить и двоичный счетчик ИЕ7 (рис. 4.2). ИЕ7 считает - от 0 до 15. Счетчик реверсивный, обеспечивает как прямой счет (по положительному фронту на входе +1), так и обратный счет (по положительному фронту на входе –1). При прямом счете отрицательный сигнал переноса вырабатывается на выходе >15 (у ИЕ7). При обратном (инверсном) счете отрицательный сигнал переноса вырабатывается на выходе < 0 после достижения выходным кодом значения 0000. Имеется возможность сброса счетчика в нуль положительным сигналом на входе R, а также возможность параллельной записи в счетчик кода со входов D1, D2, D4, D8 по отрицательному сигналу на входе –WR. При параллельной записи информации счетчик ведет себя как регистр-защелки, то есть выходной код счетчика повторяет входной код, пока на входе –WR присутствует сигнал нулевого уровня.
Таблица режимов работы счетчиков ИЕ7з
| Выходы | Режим работы | |||
| R | -WR | +1 | -1 | |
| 1 | Х | Х | Х | Сброс в нуль |
| 0 | 0 | Х | Х | Параллельная запись |
| 0 | 1 | 1 | 1 | Хранение |
| 0 | 1 | 0 | 0 | Хранение |
| 0 | 1 | 0 | 1 | Прямой счет |
| 0 | 1 | 1 | 0 | Обратный счет |
Таблица .5
Вход параллельной записи обозначается иногда на схемах также L, С, а выходы переноса обозначаются также CR и BR.
После сброса счетчик начинает счет по положительным фронтам на счетных входах от нулевого кода. После параллельной записи счет начинается от числа, записанного в счетчик. После переполнения счетчика ИЕ7 (достижения кода 1111) при прямом счете вырабатывается отрицательный сигнал переноса > 15, повторяющий входной отрицательный импульс на входе +1 с задержкой. После достижения кода 0000 при обратном счете вырабатывается отрицательный сигнал переноса < 0, повторяющий входной отрицательный импульс на входе –1 с задержкой.
Входные сигналы счета, записи и сброса не должны быть слишком короткими. Не должен быть слишком малым временной сдвиг между сигналами на входах D1–D8 и сигналом записи как в начале импульса записи, так и в его конце (сигнал записи -WR должен начинаться после установления входного кода, а заканчиваться - до снятия входного кода).
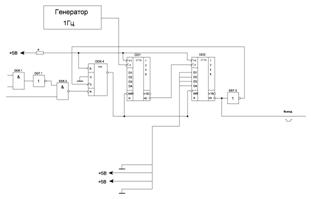
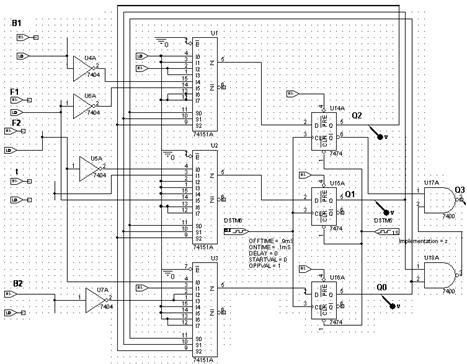
Рис. 8. Формирователь временного интервала.
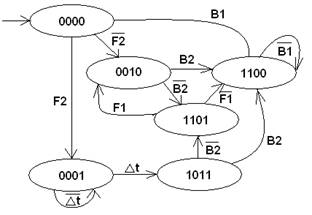
Через заданный интервал времени после сигнала запуска, который придет с автомата, высокий уровень на выходе таймера сменится на низкий. Так как через ![]() нам необходимо получить “1” то подключим к выходам таймеров инверторы. Тогда через 3с сигналы
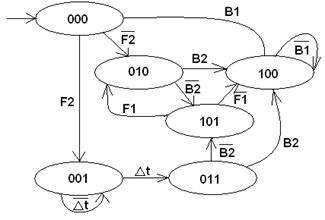
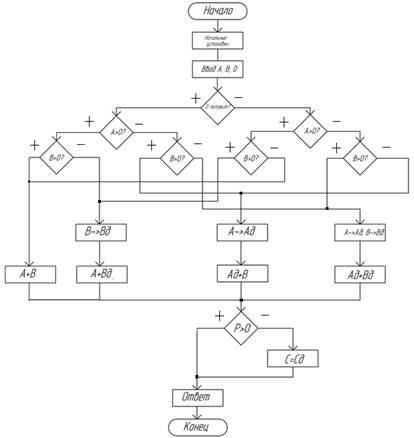
нам необходимо получить “1” то подключим к выходам таймеров инверторы. Тогда через 3с сигналы ![]() примут истинные значения. Из блок-схемы (Рис.9) видно, что 3-секундный таймер должен запускается при выходном состоянии автомата «001». Т.к. таймер запускается отрицательным импульсом, то на вход элементов таймера подключим КЛУ.
примут истинные значения. Из блок-схемы (Рис.9) видно, что 3-секундный таймер должен запускается при выходном состоянии автомата «001». Т.к. таймер запускается отрицательным импульсом, то на вход элементов таймера подключим КЛУ.
Выходной импульс заданной длительности начинается сразу после входного сигнала, но длительность его может отличаться от заданной на какое-то время, меньшее периода тактового сигнала. Иногда это более приемлемое решение, особенно при больших длительностях выходного сигнала, значительно больших, чем период тактового сигнала. Схема формирователя временного интервала показана на рис.4.
Работа схемы начинается с подачи короткого отрицательного импульса –Старт. Он перебрасывает триггер, который разрешает работу счетчиков снятием сигнала параллельной записи –WR. По отрицательному фронту входного сигнала начинается положительный выходной сигнал заданной длительности. Счетчики начинают считать на уменьшение кода по положительным фронтам тактового сигнала с генератора. Когда они досчитают до нуля, вырабатывается сигнал переноса, перебрасывающий триггер в исходное состояние. Работа схемы возобновится после следующего сигнала – Старт.
Если входной код равен 300, то длительность выходного сигнала составит от 3600Т до 3601Т, где Т - период тактового сигнала, в зависимости от момента прихода входного сигнала по отношению к тактовому сигналу. Абсолютная погрешность выдержки длительности выходного сигнала в любом случае не превышает периода тактового сигнала Т. Погрешность при Т=0.01с равна
![]()
Похожие работы
... параметрах, а также исполнительных устройствах. Функционирование автомата производится по приведенному в задании алгоритму. 1. Структурный синтез управляющего автомата 1.1 Построение направленного графа абстрактного автомата При проектировании устройства логического управления будем ориентироваться на синхронный дискретный автомат Мура, поскольку для асинхронного дискретного автомата ...
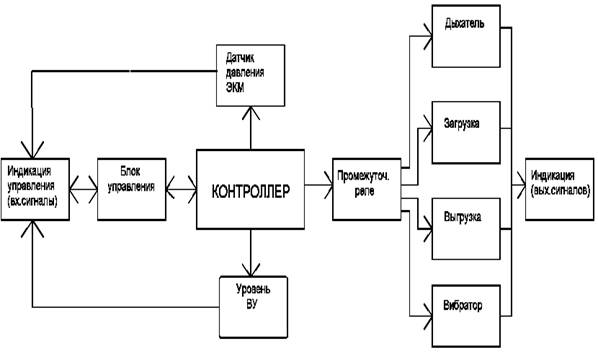
... шара, снабженного канавками на поверхности для создания оптимальной турбулентной струи пылевозд. смеси. 1.3 Разработка структурной схемы В данном разделе необходимо представить структурную схему (рис.1.3.1) разрабатываемого нами автоматизированного блока управления пневмокамерным насосом. Структурной называется схема, которая определяет функциональные основные части изделия и связи между ...

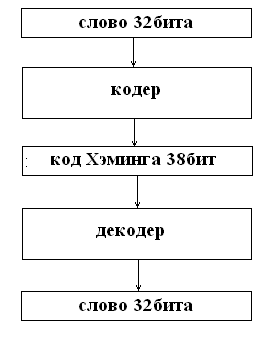
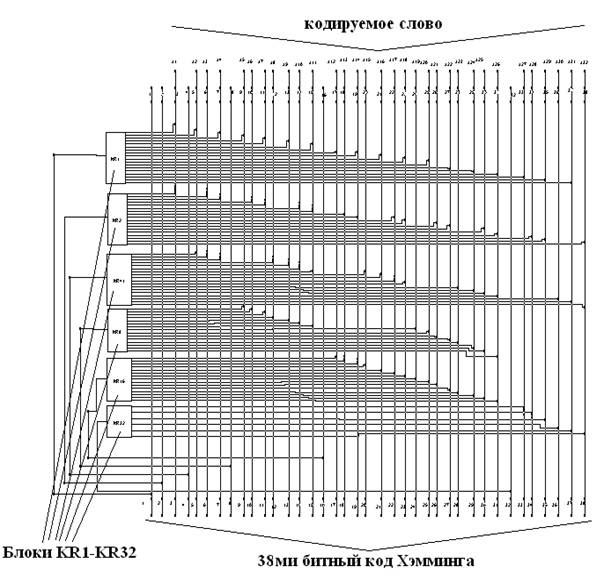
... кодирования можно разработать устройство, которое поможет понять принцип работы метода Хэмминга. Кодер – декодер будем разрабатывать на основе ИМС К555ВЖ1. 2.1 Разработка устройства кодирования информации методом Хемминга Кодер, преобразует 32х битное слово в 38ми разрядный код Хэмминга, после чего слово хранится в памяти или передаётся по шинам и т.д. В процессе передачи или хранения в ...
... переходов автомата. 3. Проектирование алгоритма и построение абстрактного автомата арифметико-логического устройства 3.1 Задание и исходные данные Разработка арифметико-логического устройства, выполняющего операцию сложения и вычитания в прямом двоичном коде. Исходные данные: – разрядность операндов – 8 бит; – разрядность результата – 8 бит; – элемент памяти – ПЗУ; – формат ...
0 комментариев