Навигация
3. Дифференцирующее звено
![]() , Т=0.023 с
, Т=0.023 с
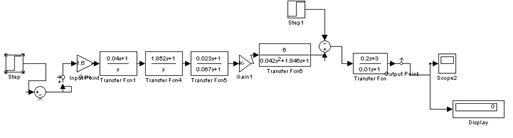
Рис.10. Модель скорректированной САУ в Matlab
a) минимальное значение управляющего (g=1.8) и отсутствие возмущающего (z=0) воздействий: g=1.8
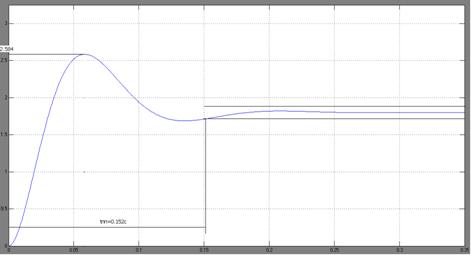
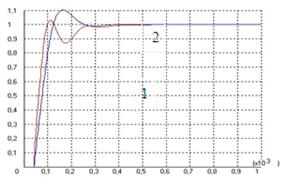
Рис.11. Переходная характеристика скорректированной САУ при минимальном задающем и отсутствии возмущающего воздействия (g=1.8 z=0)
перерегулирование:
![]()
время переходного процесса: ![]()
б) максимальное значение управляющего (g=8) и отсутствие возмущающего (z=0) воздействий: g=8
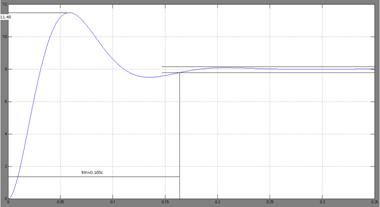
Рис.12. Переходная характеристика скорректированной САУ при максимальнм задающим и отсутствии возмущающего воздействия (g=8 z=0)
перерегулирование:
![]()
время переходного процесса: ![]()
в) минимальное значение управляющего (g=1.8) и максимальное возмущающее (z=9) воздействий g=8
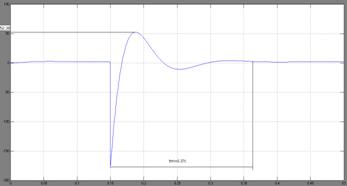
Рис.13. Переходная характеристика скорректированной САУ при минимальном задающим и максимальным возмущающим воздействии (g=1.8 z=-9)
перерегулирование: ![]()
время переходного процесса: ![]()
г) максимальное значение управляющего (g=8) и максимальное возмущающее (z=9) воздействий g=8
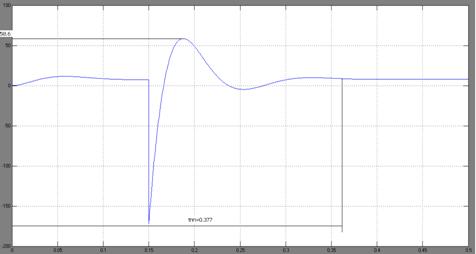
Рис.14. Переходная характеристика скорректированной САУ при максимальном задающим и максимальным возмущающим воздействии (g=8 z=-9)
перерегулирование:
![]()
время переходного процесса: ![]()
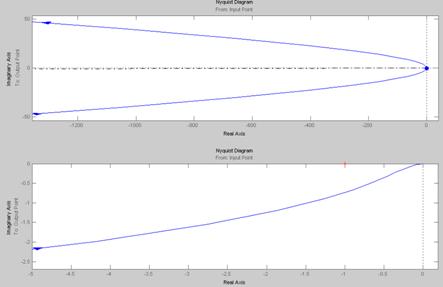
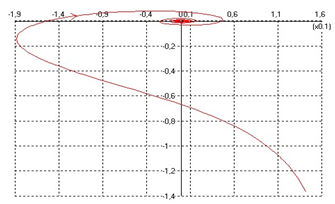
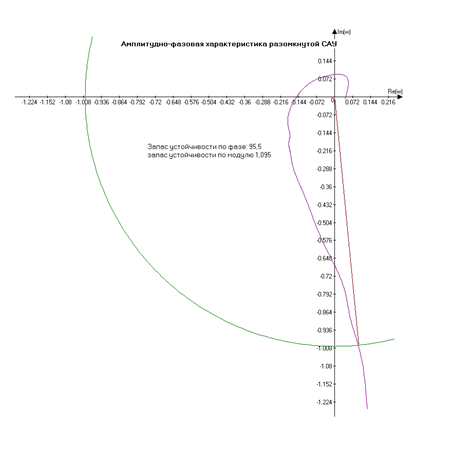
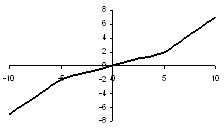
Рис.15. АФЧХ разомкнутой скорректированной САУ
Как видно из рисунка характеристика не охватывает точку [-1:0]. Из этого следует что разомкнутая, а следовательно соответственно, замкнутая САУ устойчива (по Найквисту).
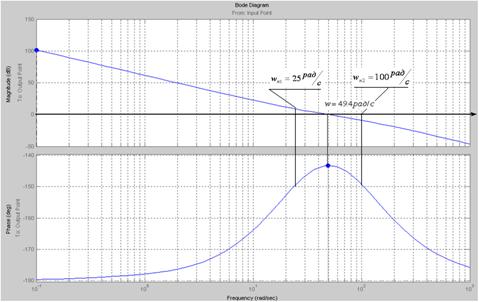
Рис.16. ЛАЧХ и ЛФЧХ разомкнутой скорректированной САУ
Запас устойчивости по амплитуде определяется величиной допустимого подъема ЛАЧХ, при котором система окажется на грани устойчивости. Из рисунка видно что запас по амплитуде бесконечен т.к. ЛФЧХ не достигает критической фазы ![]() .
. ![]()
Запас устойчивости по фазе определяется величиной избытка фазы, на который должен вырасти запаздывание САУ при частоте среза, чтобы САУ оказалась на границе устойчивости:
![]()
8. Оптимизация САУ
Объект управления содержит в себе звено второго порядка, которое на практике реализовать достаточно трудно. Следовательно, адекватно было бы упростить объект управления, понизив его порядок. Передаточная функция ОУ имеет вид:

Имеем в звене:
- форсирующую постоянную времени
Тф = 0.2/3=0.67с
- три инерционные постоянные времени:
Ти] = 0.023с
Ти2 = 1.852с
Ти3 = 0.01с
Так как процесс определяет инерционная составляющая равна Ти2 = 1.852, то можно пренебречь форсажом 0.2 и малыми инерционными составляющими Ти1 = 0.023, Ти3 = 0.01. т.к. они лежат справа от рабочей полосы частот, получим ОУ вида

Для данного ОУ получим регулятор:
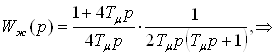
где ![]() наименьшая постоянная времени нескорректированной системы (
наименьшая постоянная времени нескорректированной системы (![]() )
)


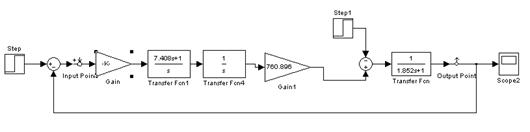
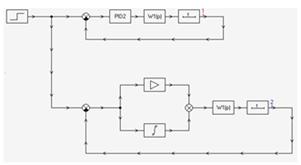
Рис.17. Схема САУ с упрощенным ОУ упрощенным регулятором
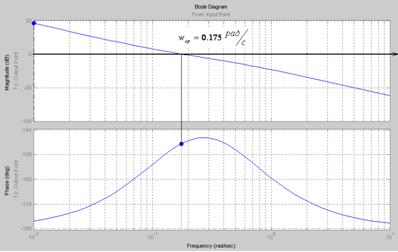
Рис.18. ЛАЧХ и ЛФЧХ разомкнутой системы с упрощенным ОУ упрощенным регулятором
Запас устойчивости по амплитуде определяется величиной допустимого подъема ЛАЧХ, при котором система окажется на грани устойчивости. Из рисунка видно что запас по амплитуде бесконечен т.к. ЛФЧХ не достигает критической фазы ![]() .
. ![]()
Запас устойчивости по фазе определяется величиной избытка фазы, на который должен вырасти запаздывание САУ при частоте среза, чтобы САУ оказалась на границе устойчивости:
![]()
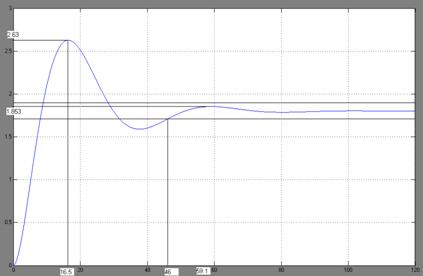
Рис.19. Переходная характеристика скорректированной САУ с упрощенным ОУ при минимальном задающем и отсутствии возмущающего воздействия (g=1.8 z=0)
Декремент затухания:
![]() ,
,
перерегулирование:
![]()
время переходного процесса: ![]()
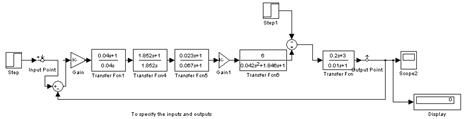
Рис.10. Модель скорректированной САУ в Matlab
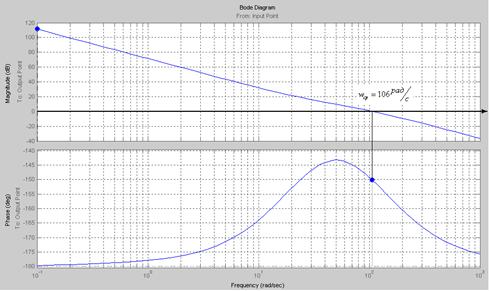
Рис.20. ЛАЧХ и ЛФЧХ разомкнутой скорректированной САУ
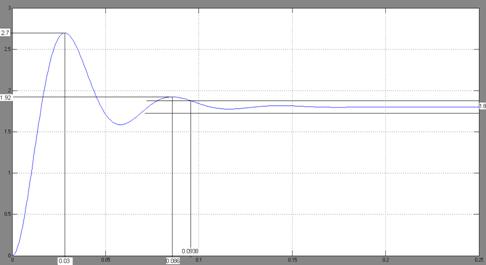
Рис.21. Переходная характеристика скорректированной САУ при минимальном задающем и отсутствии возмущающего воздействия (g=1.8 z=0)
перерегулирование:
![]()
время переходного процесса: ![]()
Заключение
В рамках курсовой работы был проведен синтез САУ с заданным качеством. Был рассчитан коэффициент передачи исходной САУ с заданной статической ошибкой и с учетом влияния задающего и возмущающего воздействий. Были рассчитаны и построены статические внешние характеристики замкнутой САУ.
По характеристическому уравнению предварительно было определено, что исходная САУ устойчива, а график переходной характеристики представляет собой сходящиеся колебания. Для условно разомкнутой САУ были построены логарифмические характеристики (ЛАЧХ и ЛФЧХ). Так как САУ, по предварительной оценке, неустойчива, то нельзя говорить о параметрах запаса САУ по фазе и амплитуде.
По критерию Гурвица, после составления матрицы третьего порядка, было определено, что САУ устойчива. Проверку правильности решения матрицы третьего порядка провели на основе моделирования в пакете Mathlab критерия Найквиста. Был проведен синтез корректирующего устройства, обеспечивающего устойчивость исходной САУ и ее настройка на симетричный оптимум.
Были смоделированы, в пакете Mathlab, переходные процессы скорректированной САУ и определены время переходных процессов и величина перерегулирования.
На основе ЛАЧХ и ЛФЧХ скорректированной САУ был определен запас по фазе и амплитуде.
Список литературы
1. Теория автоматического управления: Учеб. для вузов. – Ч. 1. Теория линейных систем автоматического управления / Под ред. А. А. Воронова. – 2-е изд., перераб. и доп. – М.: Высш. шк., 1986.
2. Иванов Е. А., Сильченкова В. В. Исследование качества и синтез линейных систем автоматического управления: Учеб. пособие по курсу «Теория автоматического управления». – М.: МИЭТ, 1982.
3. Иванов Е. А., Сильченкова В. В. Линейные системы автоматического управления: Учеб. пособие. – М.: МИЭТ, 1980.
Похожие работы
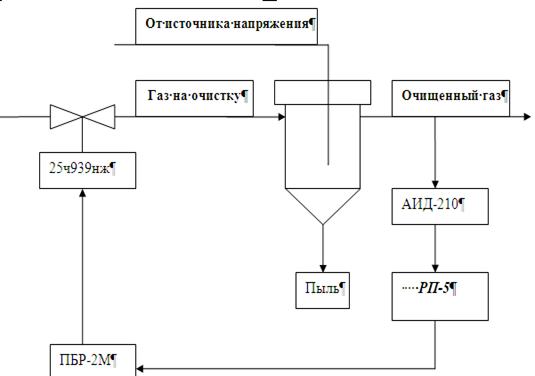
... параметры. Показателем эффективности данного процесса является степень очистки газа. Для решения задачи построена одноконтурная система управления процессом электрической очистки газа. Выбран регулятор и построена математическая модель системы управления. На модели определены оптимальные параметры регулятора. Выбраны приборы для основного контура регулирования. 1. Специальная часть ...
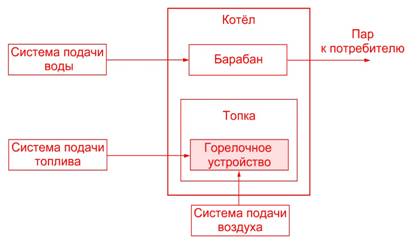
... теплоносителя и топливных ресурсов. Рассмотрим такую систему теплоснабжения шахты (см. рис.1), которая, по мнению авторов, учитывает выдвинутые выше требования. [1]. В ее основу заложена многоконтурная система автоматического управления шахтными котельными, т.е. такая система, в которой присутствует несколько контуров управления – по числу основных технологических параметров топок НТКС. В данной ...
... первый взгляд кажутся монотонными). Как показал анализ эта немонотонность обусловлена способом дефаззификации. Таким образом, целесообразно при построении нечётких систем управления пользоваться не только знаниями эксперта, но также базовыми понятиями теории автоматического управления. Дать общие рекомендации относительно выбора того или иного базиса не представляется возможным – все зависит от ...

... режимов функционирования котла. Повышение экологических характеристик котельной и культуру производственного процесса. Благодаря программному управлению система автоматически отслеживает все параметры текущих процессов, реализуемых водогрейными и паровыми котлами, и управляет технологическим оборудованием, обеспечивая нормальное и безаварийное функционирование котельной установки. Кроме того, ...
0 комментариев