Навигация
Механические воздействия на МЭА
23058
знаков
0
таблиц
1
изображение
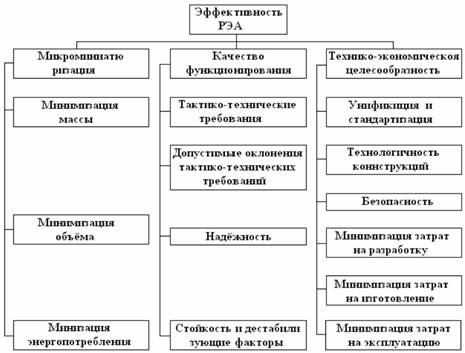
3. Механические воздействия на МЭА
МЭА должна быть механически прочной и устойчивой. При обеспечении механической прочности необходимо, чтобы механические воздействия не оставляли необратимых изменений. При выполнении требования механической устойчивости необходимо, чтобы механические воздействия не оказывали влияния на электрические характеристики аппаратуры.
В процессе эксплуатации ЭС в микроэлектронном исполнении, хотя и в меньшей степени, но всё же испытывает вибрационные и ударные механические нагрузки.
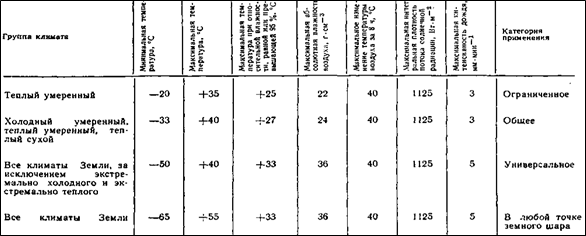
Параметрами вибрации являются амплитуда (А, мм), частота (f, Гц), ускорение, выражаемое в единицах ускорения свободного падения (g). Ударное воздействие чаще всего характеризуется величиной ускорения. Ударные нагрузки менее опасны (при равных g), чем вибрации. Например, для МЭА летательных аппаратов характерны следующие параметры механических воздействий, представленные в таблице 1.
Влияние вибраций сводится к тому, что при совпадении частоты возмущений силы и частоты собственного резонанса конструкции МЭА возникает явление механического резонанса, при котором усилия возрастают настолько, что могут привести к механическим разрушениям изделия.
Удары и ускорения наиболее опасны для хрупких напряжённых деталей особенно из керамики, стекла и ферритов. При ударах возможно разрушение деталей и узлов в местах крепления.
Основной мерой защиты конструкции МЭА от вибрации, ударов и ускорений является применение амортизаторов – демпферов.
На основании вышеизложенного для обеспечения надёжной работы МЭА необходимо проведение соответствующих инженерных расчётов по определению тепловых режимов и ожидаемых механических нагрузок, исходя из условий установки МЭА на объекты и условий эксплуатации. На основании этих расчётов принимаются специальные меры по обеспечению теплоотвода и применению амортизаторов и демпферов. Воздействие ожидаемых уровней радиации устраняется соответствующей защитой конструкции аппарата.
4 Защита блоков МЭА от механических воздействий
При эксплуатации и транспортировке на МЭА, действуют вибрации, удары и линейные ускорения. Так, например, вибрации характеризуется перегрузками, достигающими 30g в диапазоне частот от 30 до 5000 Гц, а линейные ускорения и удары – перегрузками до 50g. Действие этих факторов может привести к поломке выводов, подложек микросхем, возникновению в них усталостных напряжений, разрушению контактов и герметизации блоков.
Особенностью МЭА по сравнению с обычной РЭА является её повышенная виброустойчивость, вибро- и ударопрочность. Объясняется это следующим. Во-первых, поскольку частоты собственных колебаний радиоэлектронного аппарата, определяемые выражением ƒ0i = 1/2π*√ki /mi, где ki, mi - соответственно жёсткость крепления и массы i-ых элементов конструкции, при заметном уменьшении масс и увеличении жёсткости крепления элементов МЭА значительно возрастает, то это приводит к уменьшению числа опасных низкочастотных резонансов. Опасность низкочастотного резонанса в РЭА проявляется в резком увеличении амплитуды колебаний тел при вынужденной вибрации, определяемой выражением А= 250n /ƒ2, мм, где n - величина перегрузки, ƒ – частота вибрации, Гц. Во-вторых, для МЭА и её элементов при линейных ускорениях и ударах, значительно уменьшаются разрушающие силы Fi= n*mi*g, поскольку массы элементов конструкции опять-таки имеют малые величины.
Степень защиты МЭА от механических воздействий во многом зависит от прочности ГИС и методов их крепления в металлических рамках ячеек.
Прочность ГИС от воздействия ударов и вибраций, в основном определяется прочностью выводов навесных активных бескорпусных элементов и перемычек. На подложке типовой ГИС устанавливается обычно несколько десятков бескорпусных полупроводниковых приборов и перемычек. Каждый полупроводниковый прибор имеет по несколько выводов. Вибропрочность выводов определяется их длиной и консольностью. Допустимыми считается размеры перемычек и выводов по длине L ≤ 100d и консольности c ≤ 10d, где d- диаметр проводника, обычно равный 0,05 мм. Выводы и перемычки не должны иметь перегибов, а разварка их на подложке должна осуществляться без натяга. При этом допускаемые нормальные напряжения усилий на разрыв не должны превышать при вибрациях 2кг/мм2, при линейных ускорениях 4,3 кг/мм2 и ударах 7,2 кг/мм2.
Установлено, что ГИС, обладающие запасом вибропрочности, заведомо прочны к воздействиям ударов и линейных ускорений. При вибрациях на низких частотах наиболее опасны для ГИС амплитуды изгибных колебаний, приводящие к отрыву выводов, а на верхних частотах - виброскорости колебаний, создающие усталостные напряжения в элементах ГИС. Приняты следующие ограничения по амплитуде изгибных колебаний подложек ГИС и допустимые виброскорости соответственно А ≤ 0,3 мм и J ≤ 800 мм/с.
Расчет виброчности ячейки, как несущей конструкции ГИС, сводится к определению собственной частоты ячейки, сравнению её со значениями частот, определяемых из условий допустимой амплитуды и виброскорости в заданном в диапазоне частот внешних вибраций к выбору того или иного типа крепления ГИС в ячейки по заданным величинам. Тип крепления ГИС в ячейки определяет её коэффициент динамичности β. Коэффициент динамичности показывает, в какое число раз конструкция ячейки усиливает внешние колебания. Чем меньше коэффициент динамичности, тем слабее нежелательные резонансные свойства ячейки.
Расчет собственной частоты ячейки может быть проведен приблизительно по формуле:
ƒ0≈ (1/2π)*(π(1+ a2/b2)/a2)*√k/m,
где а и в - длина и ширина ячейки,
k-жесткость ячейки, соответствующая жесткости платы рамки,
m - приведенная погонная масса ячейки.
Допустимые значения собственной частоты ячейки из условий максимально возможных амплитуды и виброскорости могут быть найдены из следующих соотношений:
ƒ01= 1/2π*√β*n*g/A,
ƒ02= 1/2π* β*n*g/J.
где n - величина перегрузки при вибрациях,
g - ускорение силы тяжести м/с2.
Определение эффективности вибропрочности того или иного типа ячейки при заданных параметрах внешних вибраций удобно проводить по номограмме. Номограмма представляет собой ряд графиков, построенных в координатах « величина перегрузки – частота ». Ломанные линии, образующие семейство графиков для различных коэффициентов динамичности ячеек, получены расчетным путем по формулам выше из условий допустимых значений амплитуды А ≤ 0,3 мм, и виброскорости J ≤ 800 мм/с. Причём левые части кривых соответствуют первому условию, а правые (более пологих ) – второму. В точке излома выполняются оба условия вместе. Таким образом, область, ограниченная кривой графика сверху является областью нормального обеспечения вибропрочости. Ступенчатая кривая отображает заданные параметры внешних вибраций (величины перегрузок в определённых диапазонах частот). После определения собственной частоты ячейки необходимо из расчетной точки восстановить перпендикуляр и сравнить уровень перегрузок на этой частоте для внешних вибраций (ступенчатая кривая) и допустимый уровень перегрузок ячеек (ломаная кривая с выбранным β). Если первый уровень выше второго, то из семейства ломанных кривых надо выбрать такой, где его условие будет нарушено, т. е. принять тип ячейки с меньшим β, который обеспечит требуемую вибропрочность.
В заключении остановимся на некоторых вопросах применения амортизаторов в МЭА. В связи с малой массой блоков МЭА прогиб амортизаторов Z0, мм под действием силы тяжести блока становится весьма незначительным, это приводит к увеличению собственной частоты системы амортизируемых тел
ƒ0A= 15,8/√ Z0, Гц
и резкому уменьшению частот вынужденных и собственных колебаний ƒ/ƒ0A. Последнее значительно ухудшает эффективность амортизации (обычно выбирают ƒ0A в 10 раз меньше ƒ, при этом эффективность составляет 99,9 %). По этой причине применение амортизаторов в МЭА, как правило, нецелесообразно. При существующей тенденции уменьшения габаритов и весов блоков одновременно должны выполняться требования по уменьшению этих показателей амортизаторов. Однако стремление выполнять эти требования приводит к низкой эффективности амортизаторов из-за неспособности снизить ударные перегрузки при их длительности более 0.015 сек и наличия резонансных частот амортизаторов в рабочем диапазоне вибраций МЭА. Поэтому надо признать, что наиболее эффективным средством защиты блоков МЭА и их компонентов от механических воздействий в настоящее время является демпфирование микросхем в ячейках с помощью вязко - упругого компаунда типа КТ-102, выполняющего одновременно функции клея. Оптимальная толщина клеевого соединения составляет 0,1…0,3 мм. Степень демпфирования пропорциональна площади склеивания, которая может быть увеличена также за счёт многослойного склеивания.
Крепление блоков и устройств МЭА на объекте должно быть жёстким, на коротких и толстых болтах либо с помощью скоб. Однако в тех случаях, когда масса блока МЭА сравнима с массой блоков обычных РЭА, возможно применение демпфированных амортизаторов типов АПК, ДК-А и тросовых амортизаторов.
Похожие работы
... большинство (от 50 до 80 %) повреждений ЭС обусловлено воздействием на них микроорганизмов (бактерий, плесневых грибов и др.), развитие и жизнедеятельность которых определяются внешними воздействующими факторами: физическими (влажность и температура среды, давление, радиация и т.д.), химическими (состав и реакция среды, ее окислительно-восстановительные действия), биологическими. Наибольшее ...
... выводов из корпусов), повышение вибро- и ударопрочности. К недостаткам и трудностям в развитии IV поколения конструкций ЭС относятся повышенная теплонапряжённость в блоках и необходимость введения дополнительных теплоотводов (металлических рамок), незащищённость бескорпусных элементов и компонентов МСБ от факторов внешней среды и необходимость полной герметизации корпусов блоков с созданием ...
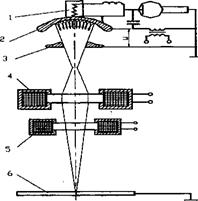
... -лучевое оборудование и разрабатывается аппаратура для наблюдения, контроля и регулирования процесса электронно-лучевого воздействия. Интенсивный обмен информацией в области достижений электронно-лучевой технологии привел к тому, что электронный луч стал заурядным технологическим инструментом для нагрева, плавки, зонной очистки, сварки металлов больших толщин, микросварки, макро- ...
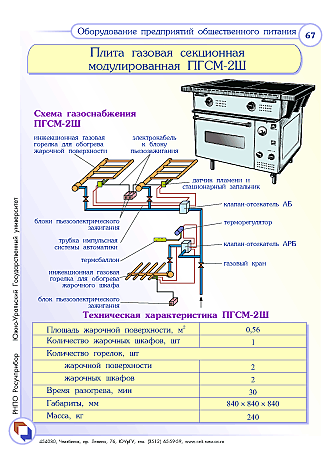
... конфорки (индукционные плиты). · По типу нагревательных элементов в газовых моделях: - с открытыми горелками; - с закрытыми горелками; - с комбинированной рабочей поверхностью. 3. УНИВЕРСАЛЬНОЕ ТЕПЛОВОЕ ОБОРУДОВАНИЕ 3.1 Электрические плиты Отечественная промышленность выпускает в основном секционные модульные электрические плиты типа ПЭСМ-4Ш, ПЭСМ-4ШБ, ПЭСМ-4, ПЭСМ-2, ЭП-7М, ...
0 комментариев