Навигация
Время-импульсный цифровой вольтметр
19754
знака
2
таблицы
7
изображений
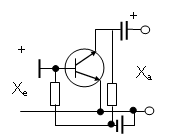
2. Время-импульсный цифровой вольтметр
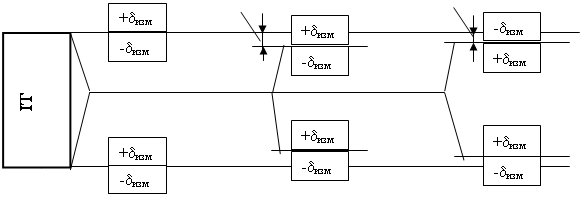
В этих вольтметрах (рис. 2, а и б) измеряемое напряжение Ux предварительно преобразуется во временной интервал tx путем сравнения Ux с линейно-изменяющимся напряжением Uk.
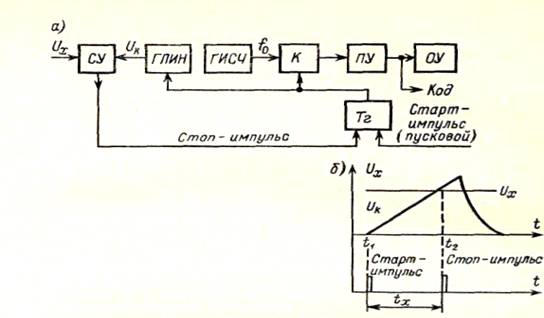
Рис. 2. Схема (а) и диаграммы напряжений (б) время-импульсного вольтметра
При запуске прибора старт-импульсом в момент t1 срабатывает триггер Тг, который открывает ключ К и запускает генератор линейно-изменяющегося напряжения ГЛИН. Напряжение UK на выходе генератора ГЛИН начинает изменяться по линейному закону, и на вход ПУ подаются квантующие импульсы. В момент t2 при UK=UX сравнивающее устройство СУ стоп-импульсом через триггер и ключ прекращает подачу импульсов в ПУ. Таким образом, за время tx=t2 — t1 = Ux/k (где k — коэффициент, характеризующий скорость изменения напряжения Uк) на вход ПУ пройдет число импульсов
N=tx/T0=Uxf0/k. (2.1)
Составляющие погрешности прибора:
1) погрешность квантования, зависящая от tx/To;
2) погрешность реализации от нестабильности fо;
3) погрешность от наличия порога срабатывания СУ;
4)погрешность от нелинейности и нестабильности кривой линейно-изменяющегося напряжения, т. е. от непостоянства k; эта составляющая практически определяет точность этих вольтметров.
В настоящее время у время-импульсных ЦИУ погрешность снижена до ±0,05 %. Показания этих ЦИУ определяются мгновенным размером входного сигнала, а поэтому эти ЦИУ чувствительны к помехам.
3. Задача 1.14
Найти результат и погрешность косвенного измерения частоты по результатам прямых измерений реактивного сопротивления и индуктивности катушки с независимыми случайными погрешностями, распределенными по нормальному закону.
XL = (1,10![]() 0,02) Ом, PxL = 0,96;
0,02) Ом, PxL = 0,96;
L = (105![]() 2) мГн, РL= 0,94.
2) мГн, РL= 0,94.
Записать результат в стандартной форме для Р = 0,92.
Решение:
1) Определяем результат косвенного измерения частоты по формуле
ω = ![]() =
=![]() = 10,476 (Гц)
= 10,476 (Гц)
2) Определяем СКО случайной погрешности косвенного измерения σ(Y).
Для этого сначала находим СКО погрешности измерений XL и L:
σ(XL)=![]() ,
,
где Δ1 = 0,02 Ом – половина доверительного интервала случайной погнрешности измерения реактивного сопротивления катушки;
Z1 – значение аргумента Z для функции Лапласа
Ф(Z)= ![]() =
= ![]() = 0,48;
= 0,48;
По таблице П.1 приложения для Ф(Z)=0,48 находим ZXL = 2,05
Отсюда
σ(XL)=![]() = 0,00976 Ом.
= 0,00976 Ом.
Аналгогично для нахождения σ(L) определяем Ф(Z)= ![]() =
= ![]() = 0,47
= 0,47
По таблице П.1 приложения для Ф(Z)=0,47 находим ZL = 1,87.
Отсюда
σ(L)=![]() = 0,00106 Гн.
= 0,00106 Гн.
Затем определяем частные производные:
![]() =
=![]() = -
= - ![]() = -
= - ![]() = -100.
= -100.
![]() =
= ![]() =
= ![]() = 9,524.
= 9,524.
Наконец, находим СКО
σ(ω) = ![]() =
=
![]() = 0,9761 Гц.
= 0,9761 Гц.
3) Определим доверительный интервал для погрешности косвенного измерения частоты.
Для Ф(Z) = ![]() =
= ![]() = 0,46 по таблице П.1 приложения находим Zω= 1,75.
= 0,46 по таблице П.1 приложения находим Zω= 1,75.
Отсюда
Δω= σ(ω)·Zω=0,9761·1,75 ≈ 1,71 Гц.
4) Записываем результат измерения в стандартной форме:
ω = (10,476 ![]() 1,71) Гц; Р = 0,92.
1,71) Гц; Р = 0,92.
Похожие работы
... работы, а именно, рассмотреть методы и формы преподавания дисциплины «Основы взаимозаменяемости и стандартизации» на базе ВУЗа, мы решали ряд задач: 1. Изучить и проанализировать литературу по дисциплине «Основы взаимозаменяемости и стандартизации, а так же изучение особенности методики преподавания технических дисциплин в педагогическом ВУЗе. 2. Изучить структуру, функции и ...
... , которые могут использовать возможности и преимущества стандартизации и сертификации в качестве весомых составляющих конкурентоспособности товара. 1. Предмет, задачи и структура дисциплины «Правовые основы метрологии, стандартизации, сертификации» Стандартизация, сертификация и метрология в том виде, как это было в плановой экономике, не только не вписывались в новые условия работы, но и ...
... иные нарушения, включая разглашение государственной или коммерческой тайны, государственные инспекторы могут быть привлечены к ответственности в соответствии с законодательством Российской Федерации. 3.9. Основы квалиметрии [47] Квалиметрия — раздел метрологии, изучающий вопросы измерения качества. Здесь используются те же законы и правила, что и в области измерения физических величин, но есть ...
адкой. Ряд посадок на различные соединения деталей в машиностроении также стандартизован. Посадка ставится на рабочих чертежах деталей и узлов рядом с номинальными размерами сопряжения. В зависимости от требования к работе узла бывают посадки с зазором, переходные посадки, сочетающие зазор и натяг, и посадки с гарантированным натягом. В данной работе представлен расчет ряда посадок на наиболее ...
0 комментариев