Навигация
3.4 Расчет потерь
Основные потери в стали определяются по формуле:
![]() (112)
(112)
где ![]() - удельные потери, Вт/кг; b - показатель степени, учитывающий зависимость потерь в стали от частоты перемагничивания, b=1,5;
- удельные потери, Вт/кг; b - показатель степени, учитывающий зависимость потерь в стали от частоты перемагничивания, b=1,5;![]() ,
,![]() - коэффициенты, учитывающие влияние на потери в стали, неравномерности распределения потока по сечениям участков магнитопровода и технологических факторов;
- коэффициенты, учитывающие влияние на потери в стали, неравномерности распределения потока по сечениям участков магнитопровода и технологических факторов;![]() ,
,![]() - масса стали ярма и зубьев статора, кг. Для стали 2312 по таблице 8.26 [1, c. 348] принимается
- масса стали ярма и зубьев статора, кг. Для стали 2312 по таблице 8.26 [1, c. 348] принимается ![]() =1,3 Вт/кг. Для машины мощностью менее 250 кВт
=1,3 Вт/кг. Для машины мощностью менее 250 кВт ![]() =1,6 и
=1,6 и ![]() =1,8.
=1,8.
![]() (113)
(113)
![]() (114)
(114)
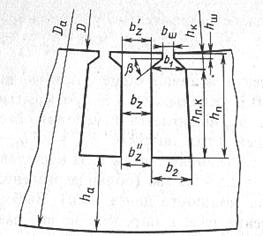
где ![]() =
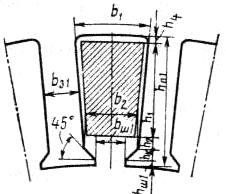
= ![]() - расчётная высота зубца статора, м;
- расчётная высота зубца статора, м; ![]() - удельная плотность стали,
- удельная плотность стали, ![]() =7800 кг/м3.
=7800 кг/м3.
![]()
![]()
![]()
Затем рассчитываются добавочные потери в стали.
Амплитуда пульсации индукции в воздушном зазоре над коронками зубцов статора и ротора, Тл:
![]() (115)
(115)
![]() .
.
![]() =0,16 из рисунка 8.53 [1, c.349].
=0,16 из рисунка 8.53 [1, c.349].
![]()
По ![]() и частоте пульсаций индукции под зубцами, равной
и частоте пульсаций индукции под зубцами, равной ![]() , определяются удельные поверхностные потери для ротора. Для проектируемого двигателя n=600 мин-1.
, определяются удельные поверхностные потери для ротора. Для проектируемого двигателя n=600 мин-1.
![]() (116)
(116)
где ![]() – коэффициент учитывающий влияние обработки поверхности зубцов ротора на удельные потери.
– коэффициент учитывающий влияние обработки поверхности зубцов ротора на удельные потери.
Принимается ![]() =1,5.
=1,5.
![]()
Полные потери ротора, Вт:
![]() (117)
(117)
![]()
Для определения пульсационных потерь вначале находится амплитуда пульсаций индукции в среднем сечении зубцов ротора, Тл:
 (118)
(118)
 .
.
Пульсационные потери в зубцах статора и ротора, Вт:
![]() (119)
(119)
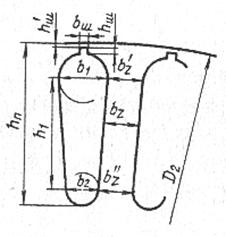
Масса стали зубцов ротора:
![]() (120)
(120)
![]()
![]()
Добавочные потери в стали, Вт:
![]() , (121)
, (121)
![]()
Полные потери в стали, Вт:
![]() (122)
(122)
![]()
Механические потери, Вт:
![]() (123)
(123)
![]() (124)
(124)
![]()
Добавочные потери, Вт при номинальном режиме:
![]() (125)
(125)
Суммарные потери в двигателе ,Вт:
![]() (126)
(126)
Коэффициент полезного действия двигателя:
 (127)
(127)
Рассчитываем холостой ход двигателя.
Электрические потери статора при холостом ходе, Вт:
![]() (128)
(128)
Ток холостого хода двигателя, А:
![]() (129)
(129)
где ![]() - активная составляющая тока, А;
- активная составляющая тока, А; ![]() - реактивная составляющая тока, А.
- реактивная составляющая тока, А.
 (130)
(130)
![]()
![]()
![]() .
.
![]() - при холостом ходе:
- при холостом ходе:
 (131)
(131)
На следующем этапе необходимо рассчитать рабочие характеристики асинхронной машины.
Похожие работы
... на вале ротора, далее, посредством щеточного контакта, к обмотке ротора можно подключить пусковой реостат. В данном курсовом проекте речь пойдет о трехфазном асинхронном двигателе с короткозамкнутым ротором. 1. АНАЛИТИЧЕСКИЙ ОБЗОР 1.1 Современные серии электрических машин В 70-е годы была разработана и внедрена серия электродвигателей 4А, основным критерием при проектировании которой ...
... b = a(t2) + g(t2) = w0× t + g 2. ТЕХНИЧЕСКОЕ ЗАДАНИЕ 2.1 Наименование и область применения Разрабатываемое устройство называется: автоматическая система управления асинхронным двигателем. Область применения разрабатываемого устройства не ограничивается горнодобывающей промышленностью и может использоваться на любых предприятиях для управления машинами с асинхронным приводом. 2.2 Основание для ...





... . Целью дипломного проекта является разработка и исследование автоматической системы регулирования (АСР) асинхронного высоковольтного электропривода на базе автономного инвертора тока с трехфазным однообмоточным двигателем с детальной разработкой программы высокого уровня при различных законах управления. В ходе конкретизации из поставленной цели выделены следующие задачи. Провести анализ ...
... ; 20. ; 21. . Полученный в расчете коэффициент насыщения отличается от принятого приблизительно до 3%, что вполне допустимо. Таблица 3 - Пусковые характеристики асинхронного двигателя с короткозамкнутым ротором с учетом вытеснения тока и насыщения от полей рассеяния № п/п Расчетные формулы Размерность Скольжение s 1 0,8 0,5 0,2 0,1 0,22=sкр 1 ...
0 комментариев