Навигация
Расчёт коллекторного двигателя постоянного тока малой мощности
16490
знаков
1
таблица
12
изображений
Введение
Коллекторные двигатели постоянного тока с возбуждением постоянными магнитами мощностью до 200 Вт находят широкое применение в системах электроприводов систем автоматики, робототехники и транспортных средств. Двигатели разрабатываются на напряжение 6 – 110 В и частотой вращения 1500 – 6000 об/мин. Для двигателей постоянного тока рассматриваемого диапазона мощности с диаметром корпуса 20 – 80 мм целесообразно использовать конструкцию с радиально расположенными магнитами. При этом целесообразно применять волновую обмотку якоря, не требующую уравнительных соединений. Число полюсов рекомендуется выбирать в диапазоне 2 р = 2 – 6. Увеличение числа полюсов снижает размеры и массу ярма статора и якоря, но увеличивает магнитные потоки рассеяния и потери в стали из-за увеличения частоты перемагничивания. Пазы якоря выбирают овальной или круглой формы, обеспечивающие постоянную толщину зубца не менее 2 мм.
Применение постоянных магнитов с высокой удельной энергией типа феррит бария позволяет улучшить массогабаритные, энергетические и стоимостные показатели двигателя постоянного тока.
Приведен аналитический расчет коллекторного двигателя постоянного тока с возбуждением от феррит бариевых постоянных магнитов, позволяющий получить заданные технические параметры при лимитированном габарите и заданном тепловом режиме электродвигателя.
1. Основные размеры двигателя
Определение основных размеров двигателя (диаметра якоря D и длины якоря Iδ) является одним из важнейших этапов в ходе расчета двигателя, так как правильно выбранные размеры якоря обеспечивают требуемый тепловой режим, соответствующий выбранному классу нагревостойкости изоляции, и рациональное использование применяемых в машине материалов.
Ток якоря при нагрузке машины
Ток якоря в двигателе с возбуждением постоянными магнитами одновременно является током двигателя
![]()
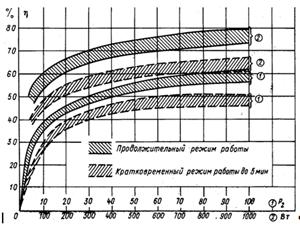
где значение КПД принимаем равным 67%, т.е. ![]()
Электромагнитная мощность двигателя
![]()
Диаметр якоря

где αδ=0,68
Вδ=0,23 Тл
А/=115*102 А/м
λ=1,1
где ![]() - коэффициент полюсного перекрытия, его значение выбирают из диапазона 0,6 – 0,7;
- коэффициент полюсного перекрытия, его значение выбирают из диапазона 0,6 – 0,7;
![]() =Bd – магнитная индукция в воздушном зазоре, принимается равной индукции магнита в оптимальной рабочей точке кривой размагничивания предварительно выбранной марки магнита (для феррит бариевых магнитов выбирают из диапазона 0,1–0,22 Тл);
=Bd – магнитная индукция в воздушном зазоре, принимается равной индукции магнита в оптимальной рабочей точке кривой размагничивания предварительно выбранной марки магнита (для феррит бариевых магнитов выбирают из диапазона 0,1–0,22 Тл);
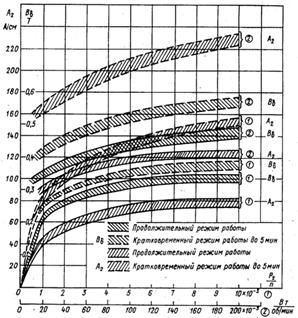
А1 – предварительное значение токовой линейной нагрузки, её значение выбирают в диапазоне (70 – 200) 102 А, м при кратковременном и повторно – кратковременном режимах работы двигателя (большие значения соответствуют большей мощности);
![]() – отношение длины магнитопровода якоря к его диаметру, это значение выбирают из диапазона 0,5 – 1,8.
– отношение длины магнитопровода якоря к его диаметру, это значение выбирают из диапазона 0,5 – 1,8.
Полученное значение диаметра якоря округляют до тысячных долей метра и выбирают ближайшее стандартное его значение по приложению А /1/.
По приложению А из стандартного ряда размеров выбираем диаметр якоря D=0,058 м
Расчётная длина якоря
![]()
Окружная скорость вращения якоря
![]()
Полюсное деление
![]()
Расчётная ширина полюса (магнита)
Выбираем конструкцию полюса без полюсного наконечника
![]()
Частота перемагничивания стали якоря
![]()
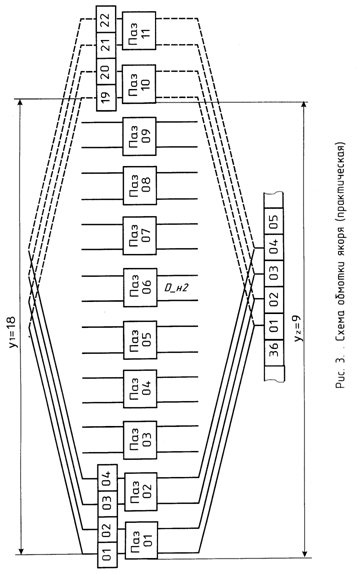
2. Обмотка якоря
Обмотка якоря машины постоянного тока является замкнутой. Конструктивно обмотка выполняется барабанной и двухслойной.
Для четырехполюсной конструкции двигателя выбираем простую волновую обмотку с числом параллельных ветвей 2а=2
где 2а - число параллельных ветвей обмотки якоря.
Предварительное общее число эффективных проводников обмотки якоря
![]()
принимаем ![]()
Число пазов якоря
![]()
принимаем ![]()
Число коллекторных пластин
![]()
принимаем ![]() , так как 2 р=4
, так как 2 р=4
Предварительное число витков в секции обмотки якоря
![]()
принимаем число витков в секции обмотки якоря равным округлённому значению, то есть ![]() .
.
Уточнённое число проводников обмотки якоря
![]()
Число проводников обмотки якоря в пазу якоря
![]()
Уточнённое значение токовой линейной нагрузки
![]()
при этом должно выполняться условие

![]()
Условие выполняется.
Шаги обмотки якоря
Для простой волновой обмотки якоря:
а) первый частичный шаг
![]()
б) результирующий шаг
![]()
в) второй частичный шаг
![]()
г) шаг обмотки по пазам
![]()
Обмоточные шаги у1, у2, у, уп должны быть целыми числам. Укорочение шага εк и ε (εк>0; ε>0) выбирают таким, чтобы шаги обмотки были целыми числами. Применение укорочения шага (εк>0) в петлевых обмотках приводит к уменьшению длины и вылета лобовых частей, к уменьшению сопротивления и массы обмотки якоря.
Похожие работы

... ; которая должна быть близкой к принятому ранее значению. Площадь окна необходимую для размещения обмотки возбуждения рассчитывают так же как и для машин с последовательным возбуждением.ПОТЕРИ И КПД МАШИНЫ ПОСТОЯННОГО ТОКА В МПТ различают следующие виды потерь: потери в обмотках якоря и возбуждения потери в щётках; потери в стали ...
стоянного тока мощностью 400 Вт для бытовой техники. 2.2 Цель выполнения КР и назначение изделия Цель выполнения - создание электродвигателя для бытовой техники. Применение электродвигателя повышает КПД привода, уменьшает металлоемкость и трудоемкость при изготовлении. 2.3 Технические требования 2.3.1Требования по назначению Режим работы продолжительный по ГОСТ 2582-81. Основные ...
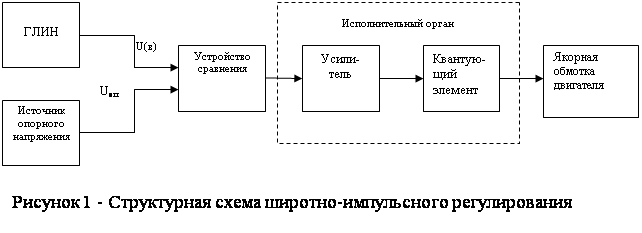
... импульсов tu при неизменном среднем моменте на валу двигателя. В зависимости от соотношения электромагнитной постоянной времени обмотки якоря tя и величины Тu, от схемы управления, момента нагрузки и тока в цепи якоря возможны два основных режима работы двигателя при импульсном управлении: режим прерывистого тока и режим непрерывного тока. Режим прерывистого тока возможен при tя< Тu и ...
... обмотки а) шаг по коллектору и результирующий шаг б) первый частичный шаг в) второй частичный шаг У = Ук – У1 У = 28,5 – 13,75 = 14,75 на (рис.1) отображена схема обмотки якоря проектируемого двигателя постоянного тока 2.5 Определяем размеры магнитной цепи. 47. Предварительное значение внутреннего диаметра якоря и диаметр вала м 48. Высота стенки якоря [1, ...
0 комментариев