Навигация
Устройство импульсного управления исполнительным двигателем постоянного тока
22749
знаков
3
таблицы
12
изображений
Содержание
Введение
1. Анализ исходных данных и выбор схемы
2. Принцип работы устройства
3. Расчёт цепи схемы управления
3.1. Расчёт генератора линейно изменяющегося напряжения
3.2. Расчёт сравнивающего устройства
3.3. Расчёт исполнительного устройства
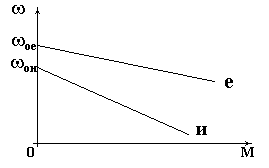
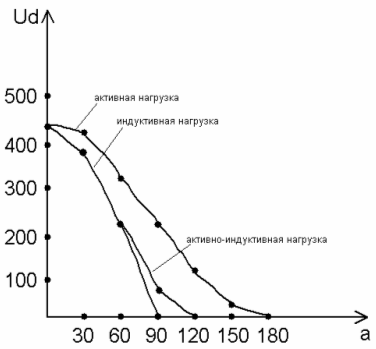
4. Построение механической и регулировочной характеристик электродвигателя
Заключение
Список используемой литературы
Введение
Машины постоянного тока до сих пор активно применяются в качестве двигателей (ДПТ) и генераторов (ГПТ). ДПТ имеют хорошие регулировочные свойства, значительную перегрузочную способность и сравнительно мягкие механические характеристики, а кроме того мало подвержены внешним воздействиям. Благодаря этому они активно используются в промышленности, особенно в областях регулирования и системах автоматики.
Исполнительные двигатели постоянного тока (ИДПТ) являются одной из наиболее распространенных составных частей исполнительных механизмов. Поэтому двигатель является либо чисто инерционным звеном, либо инерционным звеном, соединенным совместно с другими звеньями, он обладает способностью сглаживать пульсации управляющего напряжения Uу, усредняя его. Это позволяет использовать регулирующие устройства, работающие в импульсном режиме (управляемые выпрямители, широтно-импульсные усилители и т.п.), когда изменения напряжения управления, непрерывно подводимого к двигателю, а путем изменения времени, в течение которого к двигателю подводится накопительное напряжение.
Конструкция ДПТ сложнее и их стоимость выше, чем асинхронных двигателей. Однако в связи с широким применением автоматизированного электропривода и тиристорных преобразователей, позволяющих питать электродвигатели постоянного тока регулируемым напряжением от сети переменного тока, эти электродвигатели широко используют в различных отраслях народного хозяйства.
Эта работа направлена на построение устройства управления (УУ) к одному из многих представителей класса ИДПТ. Здесь будут рассматриваться основные принципы построения УУ ИДПТ и приведен расчет одного устройства для двигателя с мощностью P = 75 Вт и скоростью вращения n = 5000 об/мин.
1. Анализ исходных данных и выбор схемы
В данной курсовой работе предлагается рассчитать схему импульсного управления исполнительным двигателем постоянного тока (ИДПТ).
Наиболее подходящим по бланку задания двигателем является СЛ-525, т.к. у него высокая продолжительность непрерывной работы (2000 ч.), высокий КПД (59%). В дальнейшем будем использовать этот двигатель, все расчеты ведутся по его данным.
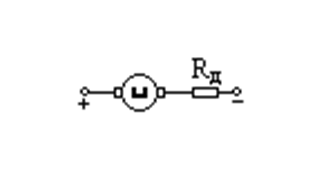
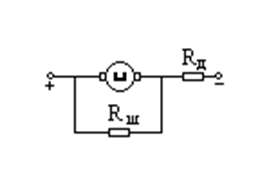
В соответствии с бланком задания двигатель СЛ-525 питается от двух независимых источников напряжения (двигатель с независимым возбуждением), которые подают энергию соответственно на якорную обмотку и обмотку возбуждения. Из этого следует, что принципиально возможно два варианта управления: якорное, когда обмотка возбуждения подключена постоянно к источнику с неизменным напряжением (а на якорную обмотку подают напряжение управления только при необходимости вращения двигателя) и полюсное, при этом якорная обмотка подключена на источник с неизменным напряжением, а напряжение, подводимое к обмотке возбуждения, изменяется. Фактически при полюсном управлении изменяется магнитный поток. Данный способ применяется сравнительно редко, т.к. при Uв = 0 в ИДПТ имеется остаточный поток, а, следовательно, и небольшой электромагнитный момент, приводящий к самоходу двигателя, что недопустимо в точных системах, где применяются двигатели. Кроме того, при данном способе управления регулировочные характеристики могут быть неоднозначны и нелинейны, что также можно отнести к недостаткам этого способа управления.
Поэтому в основу расчета следует положить принцип якорного управления двигателем. Одним из недостатков этого способа является большая мощность управления. Именно с целью ее уменьшения и следует использовать принцип импульсного управления двигателя по якорной обмотке.
При таком способе двигатель управляется напряжением, подводимым к якорю с определенной длительностью. Для оценки длительности импульса вводится относительная величина, равная ![]() и называемая коэффициентом заполнения (обратная величина -
и называемая коэффициентом заполнения (обратная величина - ![]() - скважность).
- скважность).
В этой формуле tu - время импульса, Т - период следования импульсов.
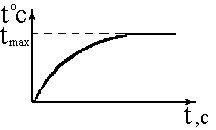
Работа двигателя при импульсном управлении состоит из чередующихся периодов разгона и торможения, причем периоды разгона должны быть малы по сравнению с электромеханической постоянной времени двигателя - тогда скорость вращения якоря w(t) не успевает к концу периода достигнуть установившегося значения.
Мгновенная скорость якоря электродвигателя будет непрерывно колебаться относительно среднего значения wСР, которое при неизменных моменте нагрузки и напряжении возбуждения однозначно определяется коэффициентом заполнения t. Причем амплитуда этих колебаний тем меньше, чем больше отношение электромеханической постоянной двигателя к периоду следования импульсов Т. С ростом частоты управляющих импульсов и с увеличением электромеханической постоянной времени амплитуда колебаний скорости уменьшается. Среднее значение скорости увеличивается с ростом относительной продолжительности импульсов, подаваемых на электродвигатель, и зависит от момента нагрузки и напряжения импульса Umax, что необходимо учитывать при применении данного способа управления.
Вообще, к импульсному регулированию существуют два подхода:
- При постоянном t изменяется напряжение питания, тогда управление сводится к подаче энергии в цепь якоря, изменяемой по величине, но в фиксированные моменты времени. Способ практически не используется, т.к. имеется полная аналогия якорного управления.
- Собственно импульсное регулирование, которое в свою очередь можно подразделить на частотно-импульсное и широтно-импульсное управление.
Названия этих методов говорят сами за себя.
Так при частотно-импульсном регулировании t изменяется с изменением частоты следования импульсов. При этом длительность импульса не изменяется. По абсолютной величине она остается постоянной.
При широтно-импульсном регулировании частота импульсов остается постоянной, а tu изменяется.
Для дальнейшего рассмотрения и последующего расчета следует принять именно этот способ.
2. Принцип работы устройства
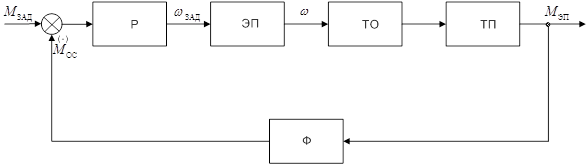
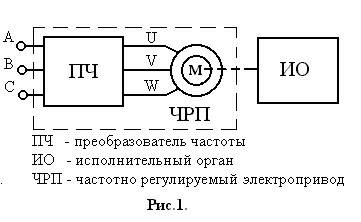
Структурную схему наиболее просто и часто встречающегося варианта широтно-импульсного регулирования работы двигателя можно увидеть на рис.1.
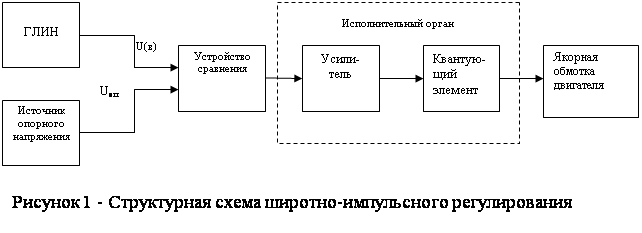
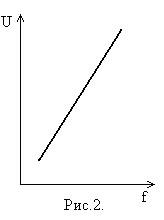
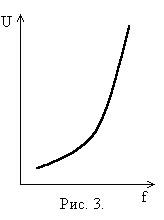
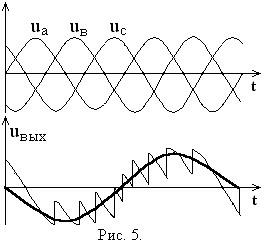
На данном рисунке ГЛИН - это генератор линейно изменяющегося напряжения. С помощью него создается частота следования импульсов. Диаграммы, иллюстрирующие работу устройства, изображены на рис.2,3.
Схема работает следующим образом. ГЛИН подает импульсы на один из входов устройства сравнения - U(t), на другой вход поступает сигнал постоянного уровня Uоп (рис.2, 3а). В случае, если U(t) ![]() Uоп, на выходе устройства сравнения возникает последовательность импульсов прямоугольной формы. Если же U(t) > Uоп, на выходе наблюдается низкий уровень сигнала (логический ноль). Импульсы возникают с частотой ГЛИН. Длительность импульсов изменяется посредством регулирования величины опорного напряжения (рис.2, 3б). Источник опорного напряжения реализуется с помощью потенциометра. В качестве устройства сравнения используется компаратор напряжения. Учитывая, что сигнал, выдаваемый компаратором невелик (I = 0,005А), его необходимо усилить. Для этого в схеме предусмотрен усилитель. В таком усилителе, как в обычном импульсном, нельзя использовать в качестве разделительных элементов конденсаторы и трансформаторы, поскольку вместе с изменением длительности импульса при неизменной частоте изменяется постоянная составляющая, которая не передается разделительными элементами. Таким образом, данный усилитель представляет собой усилитель постоянного тока. В данной курсовой работе усилитель выполнен на базе ключей с резистивной связью.
Uоп, на выходе устройства сравнения возникает последовательность импульсов прямоугольной формы. Если же U(t) > Uоп, на выходе наблюдается низкий уровень сигнала (логический ноль). Импульсы возникают с частотой ГЛИН. Длительность импульсов изменяется посредством регулирования величины опорного напряжения (рис.2, 3б). Источник опорного напряжения реализуется с помощью потенциометра. В качестве устройства сравнения используется компаратор напряжения. Учитывая, что сигнал, выдаваемый компаратором невелик (I = 0,005А), его необходимо усилить. Для этого в схеме предусмотрен усилитель. В таком усилителе, как в обычном импульсном, нельзя использовать в качестве разделительных элементов конденсаторы и трансформаторы, поскольку вместе с изменением длительности импульса при неизменной частоте изменяется постоянная составляющая, которая не передается разделительными элементами. Таким образом, данный усилитель представляет собой усилитель постоянного тока. В данной курсовой работе усилитель выполнен на базе ключей с резистивной связью.
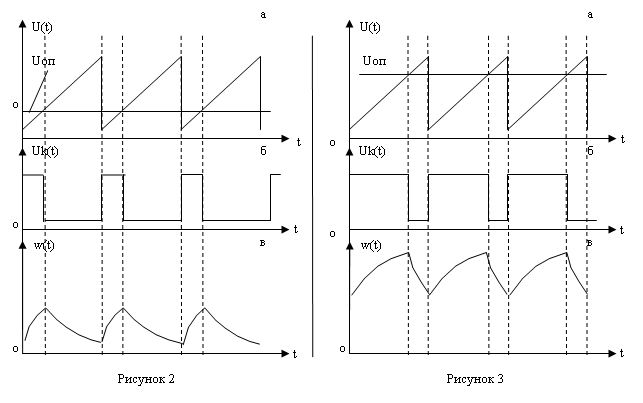
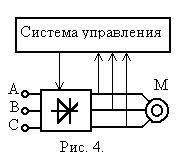
Импульсный сигнал, усиленный усилителем, управляет работой квантующего элемента, который является электронным прибором (транзистором или тиристором), работающем в ключевом режиме. Когда ключ открыт, напряжение от источника питания поступает на якорную обмотку двигателя. Скачок напряжения в виде импульса приводит к разгону двигателя, а пауза определяет режим торможения двигателя. Посредством чередования разгона и торможения двигателя устанавливается средняя скорость вращения его вала. Причем пульсации скорости являются незаметными благодаря инертности двигателя и достаточно большой частоте следования импульсов (рис.2в, 3в).
В данной схеме в качестве источника переменного напряжения используется именно ГЛИН, т.к. именно он обеспечивает плавность и линейность регулирования подачи импульсов. Если бы в качестве такого источника был использован, например, источник напряжения с сигналом вида U(t) = |sin wt|, то ближе к амплитуде данного сигнала имелась бы существенная нелинейность, и регулирование не было бы плавным.
Похожие работы
... элементов АСУ ТП 2.1 Разработка общих алгоритмов функционирования АСУ ТП. Блок – схемы алгоритма и их описание Система управления процессом испытания электропривода лифтов предназначена для управления нагрузочным электроприводом испытательного стенда в ручном или автоматическом режиме, разработана на базе микропроцессорного программируемого контроллера и выполняет следующие функции: ввод, ...
... , Кмат =35 %; К – коэффициент перевода восстановительной стоимости в ценах на 01.01.2000 г., К=6,776. Таблица 5.1 – Локальная смета на приобретение и монтаж лабораторного стенда «Исследование высокомоментного двигателя» Сметная стоимость 1620,7 рублей В том числе: оборудование 867,2 рублей монтажные работы: 482,9 рублей сметная заработная плата: 270,57 ...
... 3 - 10 кВ и выше. Однако их цена на один кВт выходной мощности самая большая в классе высоковольтных преобразователей. До недавнего прошлого преобразователи частоты на GTO составляли основную долю и в низковольтном частотно регулируемом приводе. Но с появлением IGBT транзисторов произошел «естественный отбор» и сегодня преобразователи на их базе общепризнанные лидеры в области низковольтного ...

... имеют крутой передний фронт 2-5 мс, и малую длительность 10-15 градусов. Исходя из выше изложенных технических требований предъявляемых к системе управления, в проекте в качестве электропривода выбирается электропривод постоянного тока с тиристорным преобразователем, обеспечивающим регулирование напряжения на якоре двигателя. В соответствии с технологическими условиями производства система ...
0 комментариев