Навигация
2.4 Обмотки якоря
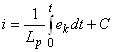
В настоящее время применяют якоря только барабанного типа, в которых проводники обмотки укладывают в два слоя в пазы, расположенные на наружной поверхности якоря (рис. 2.14, а). Для того чтобы э.д.с, индуктированные в двух сторонах каждого витка, складывались, стороны его следует располагать под полюсами противоположной полярности (рис. 2.14, б). В этом случае в каждом витке индуктируется э.д.с, в два раза большая, чем в одном проводнике. Следовательно, как и в обмотках переменного тока, основной шаг обмотки должен быть равен полюсному делению τ.
Обмотки барабанного якоря подразделяют на две основные группы: петлевые (параллельные) и волновые (последовательные). В машинах большой мощности применяют также параллельно-последовательную (лягушачью) обмотку, в которой сочетаются элементы петлевой и волновой обмоток. Основной частью каждой обмотки является секция, состоящая из одного или нескольких последовательно включенных витков; концы секций присоединяют к двум коллекторным пластинам. Число секций S равно числу коллекторных пластин K. Все секции обмотки обычно имеют одинаковое количество витков. На схемах обмоток секции для простоты всегда изображают одновитковыми. При двухслойной обмотке стороны секции, расположенные в верхнем слое, изображают сплошными линиями, а в нижнем слое–штриховыми (рис. 2.14, в).
Шаг секции yi (его называют также основным или первым частичным шагом обмотки) должен быть приблизительно равен полюсному делению т. При уi = τ шаг называют диаметральным; при уi < τ – укороченным; при уi > τ – удлиненным.
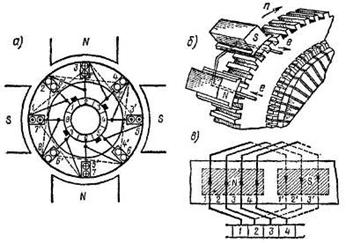
Рис. 2.14 – Расположение проводников обмотки на якоре барабанного типа (а, 6) и схема двухслойной обмотки (в)
Простая петлевая обмотка. При простой петлевой обмотке секцию присоединяют к соседним коллекторным пластинам (рис. 2.15, а). Для выполнения обмотки необходимо знать ее результирующий шаг у (рис. 2.15, б), первый у1 и второй у2 частичные шаги, а также шаг по коллектору ук. Результирующим шагом обмотки называют расстояние между начальными сторонами двух секций, следующих друг за другом по ходу обмотки; первым частичным шагом – расстояние между двумя сторонами каждой секции (шаг секции); вторым частичным шагом – расстояние между конечной стороной одной секции и начальной стороной следующей секции. Указанные расстояния обычно выражают в числе пройденных секций. Шагом по коллектору называют расстояние в коллекторных делениях между пластинами, к которым присоединены две стороны каждой секции. Так как K = S, то результирующий шаг обмотки у и шаг по коллектору ук равны. При петлевой обмотке y = y1–y2 и ук=у. Обмотку называют простой, если у=ук=±1. В этой обмотке каждая последующая секция расположена рядом с предыдущей, а якорная катушка имеет форму петли, откуда и получила свое название рассматриваемая обмотка. Обычно при выполнении обмотки принимают ук = + 1 (неперекрещенная обмотка), так как в этом случае несколько снижается расход обмоточного провода. На рис. 2.16 показаны якорные катушки машин постоянного тока при петлевой и волновой обмотках.
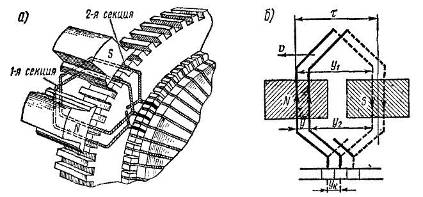
Рис. 2.15 – Общий вид петлевой обмотки (а) и схема соединений ее секций (б)
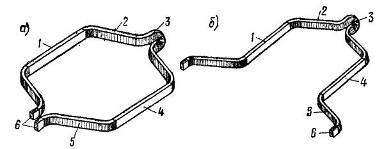
Рис. 2.16 – Формы якорных катушек при петлевой (а) и волновой (б) обмотках (при одновитковых секциях):
1, 4 – пазовые части, 2, 5 – лобовые части, 3 – задняя головка,
5 – концы секций, припаиваемые к коллектору
В простой петлевой обмотке секции, расположенные под каждой парой полюсов, образуют две параллельные ветви. Например, на рис. 2.17 показано образование параллельных ветвей в обмотке якоря четырехполюсной машины. В каждую из параллельных ветвей входит Sв =S/(2p) секций, поэтому число параллельных ветвей во всей обмотке
2a = S/SB = 2p. (2.8)
Условие 2а = 2 р выражает основное свойство простой петлевой обмотки: чем больше число полюсов, тем больше параллельных ветвей имеет обмотка. Следовательно, тем больше щеточных пальцев должно быть в машине. По этой причине простую петлевую обмотку часто называют параллельной. На рис. 2.18, а в качестве примера изображена схема петлевой обмотки четырехполюсной машины, а на рис. 2.18, б–эквивалентная схема ее, показывающая последовательность соединения отдельных проводников и образующиеся параллельные ветви. При этом цифрами 1, 2, 3 и т.д. обозначены активные проводники, лежащие в верхнем слое, а цифрами 1', 2', 3' и т.д. – лежащие в нижнем слое обмотки.
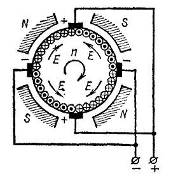
Рис. 2.17 – Образование параллельных ветвей в обмотке якоря четырехполюсной машины
Э.д.с. Е, индуктированные во всех параллельных ветвях петлевой обмотки, теоретически должны быть равны. Практически из-за технологических допусков в величине воздушного зазора под разными полюсами, дефектов литья в корпусе и других причин магнитные потоки отдельных полюсов несколько различаются между собой, а поэтому в параллельных ветвях действуют неодинаковые э.д.с. Разница между ними составляет 3–5%, однако вследствие небольшого сопротивления обмотки якоря этого оказывается достаточно, для того чтобы по параллельным ветвям даже при холостом ходе проходили довольно значительные уравнительные токи, которые загружают щетки и способствуют возникновению искрения на коллекторе. Чтобы уравнительные токи замыкались помимо щеток, в петлевых обмотках предусматривают уравнительные соединения, которые соединяют точки обмотки, имеющие теоретически равные потенциалы. Обычно для этой цели соединяют между собой коллекторные пластины, к которым подключены равно потенциальные точки обмотки (см. штриховые линии на рис. 2.18). Практически достаточно иметь одно-два уравнительных соединения на каждую группу секций, лежащих в одном пазу якоря, т.е. снабжать уравнителями 1/2 или 1/3 коллекторных пластин. Уравнительные соединения располагают чаще всего под лобовыми частями обмотки рядом с коллектором. В этом случае они находятся вне магнитного поля главных полюсов и в них э.д.с. не индуктируется. Протекающие по уравнительным соединениям токи, проходя по параллельным ветвям обмотки якоря, создают м.д.с, которые уменьшают неравенство магнитных потоков отдельных полюсов.
Простая волновая обмотка. При простой волновой обмотке секции, лежащие под разными полюсами, соединяют последовательно (рис. 2.19, а). При этом после одного обхода окружности якоря, т.е. последовательного соединения р секций, приходят к коллекторной пластине, расположенной рядом с исходной.
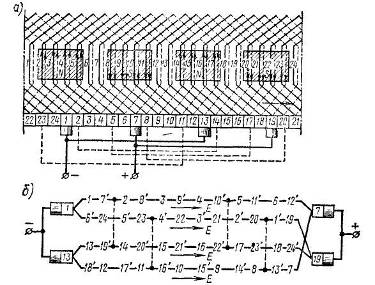
Рис. 2.18 – Петлевая обмотка четырехполюсной машины (а) и ее эквивалентная схема (б): S = K=24, y1 = 6; у2 = 5; у=ук=1
Результирующий шаг обмотки (рис. 2.19, б) у = у1 + у2; частичные шаги (у1 ≈ у2) приблизительно равны полюсному делению τ, а шаг по коллектору ук–двойному полюсному делению. Между шагом по коллектору ук и количеством коллекторных пластин K существует зависимость
рук±1=К,
откуда
ук = (К±1)/р. (2.9)
Так как ук должен быть целым числом, то число коллекторных пластин K, не может быть произвольным. Предпочтительно брать yк = (K-1)/р (неперекрещенная обмотка), так как при этом несколько уменьшается расход обмоточного провода. Якорная катушка в рассматриваемой обмотке имеет форму волны (см. рис. 2.16, б), поэтому обмотку и называют волновой. В якоре барабанного типа направление э.д.с. сохраняется неизменным во всех сторонах секций, расположенных в пределах одного полюсного деления, т.е. в S/(2p) сторонах секций.
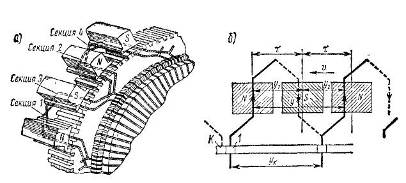
Рис. 2.19 – Общий вид волновой обмотки (а) и схема соединения ее секций (б)
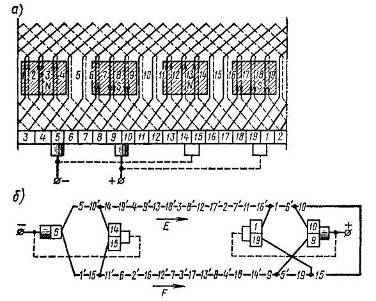
Рис. 2.20 – Волновая обмотка четырехполюсной машины и ее эквивалентная схема:
S=K= 19, у1 = 5; у2=4; у = ук = 9
В простой волновой обмотке при одном обходе окружности якоря соединяют последовательно 2 р сторон секций; поэтому количество секций в каждой параллельной ветви Sв = pS/(2p) = S/2, а число параллельных ветвей обмотки
2a = S/SB = 2. (10–10).
Следовательно, число параллельных ветвей при простой волновой обмотке не зависит от числа полюсов и всегда равно двум. По этой причине такую обмотку часто называют последовательной. Уравнительные соединения при простой волновой обмотке не требуются, так как в каждую параллельную ветвь входят секции, стороны которых расположены под всеми полюсами. В результате этого неравенство потоков отдельных полюсов не вызывает неравенства э.д.с. в параллельных ветвях. На рис. 2.20, а показана схема простой волновой обмотки четырехполюсной машины, а на рис. 2.20, б – эквивалентная схема ее, показывающая последовательность соединений отдельных секций обмотки и образующиеся при этом параллельные ветви. При волновой обмотке в машине можно устанавливать только два щеточных пальца. Однако это делают лишь в машинах малой мощности; в более мощных машинах для уменьшения плотности тока под щетками и улучшения токосъема обычно ставят полный комплект (2 р) щеточных пальцев.
Области применения различных обмоток. Двухполюсные машины небольшой мощности выполняют с простой петлевой обмоткой, так как при двух полюсах волновая обмотка превращается в петлевую. По мере увеличения мощности обычно переходят к более компактным четырехполюсным машинам, имеющим меньшую массу, чем двухполюсные машины. Четырехполюсные машины небольшой и средней мощности часто имеют волновую обмотку, не требующую применения уравнительных соединений. При повышенном напряжении на щетках (до 1000 В и более) такую обмотку применяют в четырехполюсных машинах мощностью до 200 – 300 кВт. Если же напряжение на коллекторе невелико (110 или 220 В), то уже при мощности в десятки киловатт применяют четырехполюсные машины с петлевой обмоткой для уменьшения тока ia в параллельной ветви. Величина этого тока даже в весьма мощных машинах не должна превышать 250–300 А, так как при выполнении обмотки из проводников очень большого сечения возникают значительные технологические трудности при изготовлении якорных катушек и их укладке. При простой петлевой обмотке ток ia = Iа/(2a) = Iа/(2p), поэтому с ростом мощности и тока машины для сохранения тока ветви в допустимых пределах увеличивают число полюсов.
Сложные обмотки. При мощности более 1000 кВт становится выгодным применять сложные многоходовые обмотки якоря. В простейшем случае многоходовые обмотки представляют собой m простых петлевых или волновых обмоток, наложенных на общий якорь и смещенных относительно друг друга. В сложной петлевой обмотке число параллельных ветвей 2а = 2рm, а в сложной волновой – 2а = 2m, где m-число ходов обмотки. Результирующий шаг обмотки и шаг по коллектору соответственно равны:
у = ук = ±т; у = ук = (К±т)/р.
Применение многоходовых обмоток позволяет увеличивать число параллельных ветвей при неизменном числе полюсов, увеличение которых в ряде случаев невозможно. Однако эти обмотки требуют сложных уравнительных соединений.
В машинах большой мощности часто используют параллельно-последовательную (лягушачью) обмотку, представляющую собой комбинацию простой петлевой и многоходовой волновой обмоток (рис. 2.21). Обе обмотки уложены в одни и те же пазы и имеют общие коллекторные пластины. Чтобы уравнять э.д.с. параллельных ветвей, образуемых петлевой и волновой обмотками, число параллельных ветвей 2а этих обмоток должно быть одинаковым; для этого число ходов m. волновой обмотки должно быть равно р.
Секции волновой и петлевой обмоток являются друг для друга уравнителями, поэтому лягушачью обмотку выполняют без специальных уравнительных соединений.
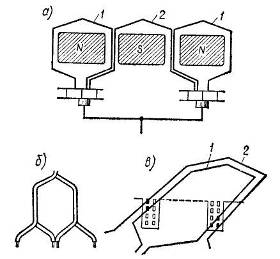
Рис. 2.21 – Схема соединения секций лягушачьей обмотки (а), форма ее якорной катушки (б) и расположение проводников в пазах (в):
1-петлевая обмотка, 2 – волновая обмотка
2.5 Магнитное поле машины постоянного тока
Холостой ход. При холостом ходе магнитный поток в машине создается только м.д.с. Fв обмотки возбуждения.
В этом случае магнитный поток Фв при симметричном воздушном зазоре между якорем и сердечником главного полюса распределяется симметрично относительно продольной оси машины (рис. 2.22, а).
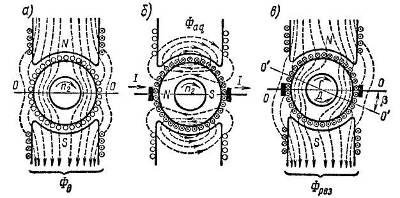
Рис. 2.22 – Магнитное поле машины постоянного тока, создаваемое:
а–обмоткой возбуждения, б – обмоткой якоря, в-результирующее
Зависимость магнитного потока возбуждения Фв от м.д.с. Fв (кривая намагничивания–рис. 2.23) для машин постоянного тока подобна кривой намагничивания для синхронных машин. Однако при проектировании машин постоянного тока допускают большие индукции на участках магнитной цепи, чем в синхронных машинах (в зубцах, якоре, станине и полюсах), вследствие чего для них коэффициент насыщения Kнас = F/Fδ = ab/ac = 1, 2 ÷ 2. Расчет магнитной цепи машины постоянного тока производят так же, как и для машин переменного тока.
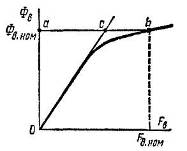
Рис. 2.23 – Кривая намагничивания машины постоянного тока
Реакция якоря. При работе машины под нагрузкой по обмотке якоря проходит ток, вследствие чего возникает м.д.с. якоря. Воздействие м.д.с. якоря на магнитное поле машины называют реакцией якоря. Для упрощения анализа явления реакции якоря будем пренебрегать насыщением магнитной цепи машины и считать, что м.д.с. Fв обмотки возбуждения и м.д.с. Faq обмотки якоря целиком расходуются на преодоление магнитными потоками воздушного зазора. В этом случае вместо указанных м.д.с. можно рассматривать соответствующие потоки: возбуждения Фв и реакции якоря Фаq. Магнитный поток Фаq, созданный м.д.с. якоря Faq в двухполюсной машине при установке щеток на геометрической нейтрали, направлен по поперечной оси машины (рис. 2.22, б), поэтому магнитное поле якоря называют поперечным. В результате действия реакции якоря симметричное распределение магнитного поля машины искажается; при этом результирующее магнитное поле оказывается смещенным к краям главных полюсов (рис. 2.22, в). При этом физическая нейтраль 0'–0' (линия, соединяющая точки окружности якоря, в которых индукция равна нулю) смещается относительно геометрической нейтрали 0–0 на некоторый угол β. В генераторах физическая нейтраль смещается по направлению вращения якоря; в двигателях – против направления вращения.
Чтобы построить кривую Bрез = f(x) распределения результирующей индукции вдоль окружности якоря, применим метод суперпозиции. Так как обмотка возбуждения является сосредоточенной, то кривая распределения создаваемой ею м.д.с. F'в = f(x) имеет форму прямоугольника, где F'в = 0,5Fв – м.д.с, приходящаяся на один воздушный зазор. В этом случае кривая индукции Bв = f(x) имеет форму криволинейной трапеции (рис. 2.24, а).
Для построения кривой м.д.с. Faqx = f(x) и создаваемой ею индукции Baqx = f(x) примем, что обмотка якоря равномерно распределена по его окружности. Тогда на основании закона полного тока м.д.с. якоря, действующая вдоль контура обхода через точки воздушного зазора на расстоянии х от оси главных полюсов,
![]() , (2.11)
, (2.11)
а м.д.с, приходящаяся на один зазор,
![]() , (2.11а)
, (2.11а)
где A = iaN/(πDa) – линейная нагрузка якоря (число ампер, приходящихся на 1 см окружности якоря).
Следовательно, м.д.с. якоря Faqx изменяется линейно вдоль его окружности (рис. 2.24, б); под серединой главного полюса она равна нулю, а в точках, где установлены щетки, имеет максимальное значение. При ненасыщенной магнитной системе магнитная индукция в воздушном зазоре
![]() , (2.12)
, (2.12)
где δx–величина воздушного зазора в точке х.
Из (2.12) следует, что под полюсом при δx = const индукция Вaqx изменяется линейно вдоль окружности якоря. Но в междуполюсном пространстве резко возрастает длина магнитной силовой линии, т.е. величина δx, и индукция Baqx резко уменьшается. В результате кривая распределения Baqx = f(x) приобретает седлообразную форму. Кривую распределения результирующей индукции Bрез = f(x) можно получить путем алгебраического сложения ординат кривых Bв = f(x) и Baqx = f(x). Как видно из рис. 2.24, в, максимум индукции Bмакс имеет место под краями главных полюсов.
Реакция якоря, таким образом, оказывает следующее влияние на магнитное поле машины:
а) физическая нейтраль 0'–0' (см. рис. 2.22) смещается относительно геометрической нейтрали 0–0 на некоторый угол β;
б) искажается кривая распределения индукции Bрез = f(x) в воздушном зазоре и возрастает индукция под краями главных полюсов, что ведет к повышению напряжения в секциях, стороны которых проходят зоны с увеличенной индукцией.
Кроме того, как будет показано ниже, результирующий магнитный поток машины при насыщенной магнитной цепи уменьшается.
Размагничивающее действие поперечного поля реакции якоря. Если магнитная цепь машины не насыщена, то кривая результирующей индукции в воздушном зазоре под действием реакции якоря искажается (рис. 2.24, в) но площадь ее остается равной площади кривой индукции при холостом ходе (рис. 2.24, а).
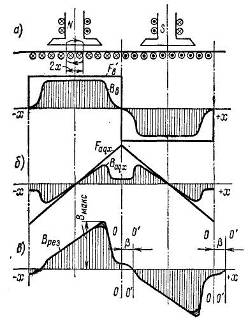
Рис. 2.24 – Распределение индукции в воздушном зазоре машины постоянного тока:
а–от обмотки возбуждения, б – от обмотки якоря, в-результирующее
Следовательно, результирующий поток Фрез при нагрузке будет равен потоку Фв при холостом ходе. Однако при насыщенной магнитной цепи реакция якоря будет уменьшать поток Фрез. Чтобы установить влияние м.д.с. Faq на величину потока Фреэ, рассмотрим зависимость результирующей индукции Bрез в воздушном зазоре от результирующей м.д.с. Fpeзx = F'в ± Faqx, действующей в некоторой точке х зазора (рис. 2.25).
Примем, что в машине насыщены только зубцы якоря. Тогда м.д.с F'в будет расходоваться на преодоление магнитного сопротивления одного воздушного зазора и одного зубцового слоя. В точках, лежащих пол серединой полюсов, эта м.д.с. создает индукцию Bср = Bв, так как в этих точках м.д.с. Faqx = 0. По мере приближения к одному из краев полюса, например к правому, у полюса N (см. рис. 2.24, в) индукция Bрез будет возрастать до величины Bпрx, так как здесь действует м.д.с. F'в + Faqx; при приближении к другому краю этого полюса (в данном случае к левому) индукция будет уменьшаться до Влевх, так как здесь действует м. д. с. F'в–Faqx. Однако из-за нелинейного характера зависимости Bpeз=f(x) прирост индукции ΔBпрx у правого края полюса будет меньше, чем снижение индукции ΔBлевx. у левого края, вследствие чего результирующий поток машины уменьшится [см. косую штриховку в кривой индукции Bрез = f(x) на рис. 2.24, в].
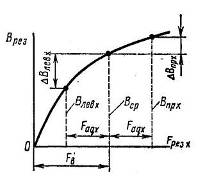
Рис. 2.25 – Определение размагничивающего действия поперечного поля реакции якоря
Хотя снижение магнитного потока под действием м.д.с. якоря обычно невелико и составляет всего 1–3%, это существенно сказывается на характеристиках генераторов постоянного – тока и приводит к уменьшению э.д.с. Е машины при нагрузке по сравнению с э.д.с. Е0 при холостом ходе.
Если машина работает при небольших токах возбуждения, т.е. на прямолинейной части кривой намагничивания, то редакция якоря размагничивающего действия не оказывает. Аналогичный эффект будет и при очень большом насыщении, когда машина снова работает на прямолинейном участке кривой намагничивания.
Реакция якоря при сдвиге щеток с геометрической нейтрали. В этом случае окружность якоря с обмоткой можно разделить на четыре зоны (рис. 2.26). Две из них, охватывающие стороны секций в пределах угла 2α, образуют продольную м.д.с. Fad
Fad = (2a/n) A; (2.13)
две другие, охватывающие стороны секций в пределах угла (π–2а), – поперечную м.д.с.
Fa9 = [(n – 2a)/n] A. (2.13a)
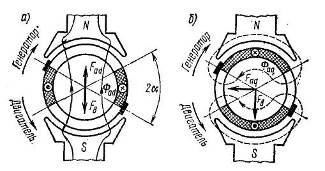
Рис. 2.26 – Возникновение продольной (а) и поперечной (б) м. д. с. якоря при сдвиге щеток с геометрической нейтрали
Продольная м.д.с. Fad создает продольный поток Фаd, который может сильно увеличивать или уменьшать результирующий магнитный поток машины Фрез в зависимости от того, совпадает м.д.с, Fad с м.д.с. Fв или направлена против нее. Направление определяется тем, в какую сторону сдвинуты щетки. Если щетки сдвинуты по направлению вращения генератора или против направления вращения электродвигателя, то продольная м.д.с. Fad размагничивает машину. При сдвиге щеток в обратном направлении м.д.с. Fad подмагничивает машину. Свойство продольной м.д.с. Fad изменять результирующий магнитный поток Фрез используется в некоторых специальных машинах, например в электромашинных Усилителях с поперечным полем. Поперечная м.д.с. Faq создает магнитный поток Фaq; она действует на поток Фрез так же, как и при расположении щеток на геометрической нейтрали.
2.6 Круговой огонь на коллекторе
При эксплуатации машины постоянного тока на коллекторе иногда возникает электрическая дуга или множество мелких электрических разрядов. Это явление называют круговым огнем.
Причиной возникновения кругового огня является чрезмерно высокое напряжение между смежными коллекторными пластинами.
Если напряжение между смежными пластинами превышает 25 В, то между этими пластинами возможно появление короткой электрической дуги.
При работе машины постоянного тока смежные коллекторные пластины могут оказаться замкнутыми через «мостик», образуемый угольной пылью или более крупными осколками щетки. В этом случае по «мостику» проходит ток, происходит его сгорание и возникает короткая дуга.
Процесс изменения тока в дуге описывается дифференциальным уравнением
![]() , (2.14)
, (2.14)
где ес–мгновенное значение э.д.с. секции; rс – активное сопротивление секции; Lc – индуктивность секции; Δид – падение напряжения в стволе дуги; Δиэ – околоэлектродное падение напряжения в электрической дуге.
Величина Δиэ для медных электродов составляет 20–23 В, что и определяет в основном минимальную величину напряжения между коллекторными пластинами, при которой возможно появление кругового огня.
Дальнейшее (после появления короткой дуги) развитие процесса зависит от параметров электрической машины: ее мощности, величины активного сопротивления и индуктивности секции, частоты вращения ротора и т.д.
В машинах малой мощности, у которых секции обмотки якоря имеют довольно большое активное сопротивление и индуктивность, ток в короткой дуге невелик, и явление кругового огня протекает сравнительно безвредно. В этом случае на коллекторе в зонах, где действует значительное напряжение между пластинами, возникает небольшое искрение. Это явление иногда называют потенциальным искрением, так как оно обусловлено повышенной разностью потенциалов между пластинами коллектора. При более мощных коротких дугах происходит оплавление смежных пластин, при этом образуются кратеры диаметром 2–3 мм и на коллекторе наблюдаются так называемые вспышки. Это явление более опасно, так как оплавленные края коллекторных пластин вызывают быстрый износ щеток, а иногда их полное разрушение.
В мощных машинах, а также машинах средней и малой мощностей с высокими значениями напряжения между коллекторными пластинами, единичная короткая дуга между смежными пластинами перерастает в мощную дугу. Эта дуга перекрывает значительную часть коллектора или даже замыкает накоротко щеткодержатели разной полярности (перекрытие коллектора). Возникновение мощной дуги на коллекторе сопровождается сильным световым и звуковым эффектом (в крупных машинах это похоже на взрыв бомбы). Большой ток якоря, возникающий при перекрытии коллектора, вызывает срабатывание защиты и повреждает поверхность коллектора, изоляторы щеткодержателей и т.д., т.е. выводит машину из строя.
Процессы перерастания единичной вспышки в круговой огонь очень быстротечны, что затрудняло их изучение. Было создано немало различных гипотез, пока не удалось сфотографировать весь процесс скоростной кинокамерой (4000 кадров в секунду). На рис. 2.27, а показала схема развития единичной вспышки в круговой огонь. Короткая дуга возникает из-за наличия «мостика» между» пластинами а и b. Ток в дуге быстро увеличивается и пространство над коллектором ионизируется, т.е. заполняется раскаленными парами меди. По мере вращения коллектора все большее пространство становится ионизированным и, наконец, дуга перекрывает несколько пластин, что ведет к еще большему возрастанию тока. Дальнейшее развитие процесса носит случайный характер, но всегда сопровождается повреждением коллектора и других деталей машины. Процесс перерастания единичной вспышки в мощную дугу длится 0,01–0,001 с и поэтому не удается создать от него какую-либо защиту.
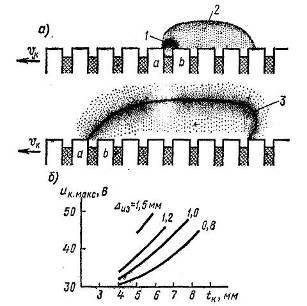
Рис. 2.27 – Возникновение кругового огня на коллекторе и зависимость предельно допустимых напряжений ик.макс от коллекторного деления tк:
1 – первичная дуга при замыкании смежных коллекторных пластин,
2 – газы и пары меди, 3 – мощная дуга
Для предотвращения возможности возникновения кругового огня необходимо снижать величину максимального напряжения между смежными коллекторными пластинами. На рис. 2.27, б показаны зависимости предельно допустимых величин максимальных напряжений между смежными коллекторными пластинами uк.макс от величины коллекторного деления tк для мощных электрических машин. Чем меньше толщина изоляции Δиз между пластинами и тоньше сами пластины, тем ниже должно быть выбрано максимальное напряжение. Безусловно, эти рекомендации являются ориентировочными, так как в них не учитываются частота вращения, величина воздушного зазора и т.д.
Искрение под щетками способствует появлению кругового огня, так как при этом происходит интенсивный износ щетрк, а следовательно, повышается вероятность появления токопроводящих мостиков.
Довольно длительное время была распространена гипотеза, согласно которой первоначальной причиной возникновения кругового огня является вытягивание дуги из-под щетки. Но она не подтвердилась практикой и экспериментами. Одним из доказательств развития кругового огня из единичной вспышки были опыты с генератором, работающим в режиме холостого хода со снятыми щетками. В этом случае искрение под щетками отсутствовало, но при достаточно высоком напряжении uк.макс возникал круговой огонь:
1) когда промежуток между смежными пластинами засорялся осколком щетки; 2) когда между этими пластинами искусственно зажигали короткую дугу с помощью вспомогательного электрода.
Реакция якоря искажает магнитное поле в воздушном зазоре машины, увеличивая магнитную индукцию под одним из краев главных полюсов (см. рис. 2.24). Вследствие этого возрастает максимальное напряжение uк.макс между смежными пластинами и увеличивается опасность кругового огня.
Для машин с петлевой и волновой обмотками соответственно:
 , (2.15)
, (2.15)
где ωс–число витков в секции; р–число пар полюсов.
Чтобы уменьшить вероятность возникновения кругового огня, в крупных машинах используют обмотки якоря с одновитковыми секциями (ωc=1), снижают среднее напряжение между коллекторными пластинами до 15–18 В (при этом соответственно ограничивают активную длину якоря) и принимают меры для уменьшения искажающего действия реакции якоря, т.е. индукции Baq. Уменьшение Baq проще всего достигается путем увеличения воздушного зазора. По этой причине машины постоянного тока обычно выполняют со сравнительно большим воздушным зазором. Однако увеличение воздушного зазора требует соответствующего повышения м.д.с. обмотки возбуждения (для создания необходимого магнитного потока). А это приводит к увеличению размеров статора и всей машины.
Более выгодным является применение особой формы воздушного зазора: минимального под серединой полюса и расширяющегося к краям, где возрастает м.д.с. якоря. При такой форме зазора магнитное сопротивление для потока главных полюсов увеличивается в меньшей степени, чем для потока, создаваемого поперечной реакцией якоря. Следовательно, расширяющийся зазор требует меньшего повышения м. д. с. обмотки возбуждения, чем равномерный.
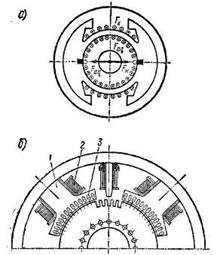
Рис. 2.28 – Принцип действия (а) и устройство (б) компенсационной обмотки:
1 – главный полюс, 2 – обмотка возбуждения, 3 – компенсационная обмотка
Еще более кардинальной мерой является применение компенсационной обмотки (рис. 2.28), которую располагают в пазах главных полюсов и соединяют последовательно с обмоткой якоря. Эту обмотку включают таким образом, чтобы образуемая ею м. д. с. Fк была направлена встречно м.д.с. якоря Faq и компенсировала ее действие. При Fк = Faq м. д. с. якоря практически не будет искажать магнитное поле в воздушном зазоре. Компенсационная обмотка существенно усложняет конструкцию машины, поэтому ее применяют только в машинах средней и большой мощности, работающих в тяжелых условиях (частые пуски, толчки нагрузки, перегрузки по току и т.п.). Кроме того, компенсационную обмотку применяют также в тех случаях, когда машина проектируется при жестких габаритных ограничениях, так как компенсационная обмотка позволяет уменьшить воздушный зазор и, следовательно, размеры обмотки возбуждения.
2.7 Коммутация
Коммутацией называют процесс изменения тока в секциях обмотки якоря при переходе их из одной параллельной ветви в другую. В более широком смысле слова под коммутацией понимают все явления и процессы, возникающие под щетками при работе коллекторных электрических машин. Если щетки искрят, то говорят, что машина имеет плохую коммутацию; если искрение отсутствует, то коммутацию называют хорошей. Качество коммутации (интенсивность искрения) в значительной степени определяет работоспособность машины и ее надежность в эксплуатации.
Причины искрения щеток. Искрение может вызываться большим количеством причин, которые обычно разбивают на две группы: механические и электромагнитные.
Типичными механическими причинами являются: биение коллектора, его эллиптичность, шероховатость рабочей поверхности коллектора, наличие выступающих коллекторных пластин и изоляционных прокладок, вибрация щеткодержателей и т.д. Все эти причины приводят к вибрации щеток, в связи с чем возможен кратковременный разрыв контакта между щеткой и коллекторными пластинами и возникновение кратковременной электрической дуги. Особенно трудно обеспечить отсутствие вибрации щеток при больших окружных скоростях коллектора – порядка 50 м/с и выше, что связано с особыми свойствами щеточного контакта.
Электромагнитные причины приводят к тому, что даже в случае идеального состояния щеточного контакта при выходе коллекторной пластины из-под щетки происходит разрыв электрической цепи, по которой проходит ток, и возникает короткая электрическая дуга, повреждающая сбегающие части щетки и коллекторных пластин. Следует отметить, что искрение, вызванное электромагнитными причинами, повреждает поверхность коллектора и приводит к вибрации щеток, т.е. способствует возникновению искрения по механическим причинам. Неустойчивость же щеточного контакта, обусловленная механическими причинами, оказывает существенное влияние на электромагнитные процессы, происходящие в коммутируемых секциях. Поэтому, как правило, искрение щеток на коллекторе является результатом совместного действия многих причин.
Необходимо иметь в виду, что стоимость ремонта и эксплуатации коллекторных машин (замена щеток, проточка коллекторов, устранение последствий кругового огня и т.д.) очень велика и в некоторых машинах (например, в тяговых электродвигателях) составляет за один год около 1/3 стоимости самой машины. Поэтому мероприятия, проводимые по уменьшению интенсивности искрения щеток, могут дать существенный технико-экономический эффект.
Качество коммутации оценивается степенью искрения (классом коммутации) под сбегающим краем щетки, из-под которого выходят пластины коллектора при его вращении. Допускаемые степени искрения согласно ГОСТ 183–74 приведены в табл. 2.1.
Как видно из табл. 2.1, при длительной работе машины допускается только слабое искрение под щетками. Однако требования ГОСТа относятся только к контролю качества коммутации электрической машины при выпуске с завода.
Таблица 2.1.
| Степень искрения (класс ком мутации) | Характеристика степени искрения | Состояние коллектора и щеток |
| 1 | Отсутствие искрения (темная коммутация) | – |
| 1 1/4 | Слабое точечное искрение под небольшой частью щетки | Отсутствие почернения на коллекторе и нагара на щетках |
| 1 1/2 | Слабое искрение под большей частью щетки | Появление следов почернения на коллекторе, легко устраняемых протиранием поверхности коллектора бензином, а также следов нагара на щетках |
| 2 | Искрение под всем краем щетки. Допускается только при кратковременных толчках нагрузки и перегрузках | Появление следов почернения на коллекторе, неустраняемых протиранием поверхности коллектора бензином, а также следов нагара на щетках |
| 3 | Значительное искрение под всем краем щетки с наличием крупных и вылетающих искр. Допускается только для моментов прямого (без реостатных ступеней) включения или реверсирования машин, если при этом коллектор и щетки остаются в состоянии, пригодном для дальнейшей работы | Значительное почернение на коллекторе, неустраняемое протиранием коллектора бензином, а также подгар и разрушение щеток |
В эксплуатации может наблюдаться искрение значительно большей интенсивности, поскольку машина работает в форсированных режимах (при перегрузках или повышенной частоте вращения). Повышенное искрение щеток может вызываться и другими особенностями эксплуатации: вибрацией и ударами машины, работой на высоте более 1000 м над уровнем моря, работой в запыленных помещениях или в агрессивной среде и т.д. Поэтому технические требования, предъявляемые к разработке машин постоянного тока, должны обязательно учитывать условия их будущей эксплуатации.
Основное уравнение коммутации. При вращении якоря секции его обмотки переходят из одной параллельной ветви в другую, вследствие чего в них изменяется направление тока (рис. 2.29, а). Большую часть времени ток секции равен току параллельной ветви ia = Ia/(2a). Изменение направления тока в секции происходит за период времени Тк, в течение которого соединенные с секцией коллекторные пластины соприкасаются со щеткой (рис. 2.29, б). Время Тк, в течение которого секция оказывается замкнутой накоротко щеткой, называют периодом коммутации; секции, в которых изменяется ток, называют коммутируемыми.
Период коммутации
![]() (2.16)
(2.16)
где bщ–ширина щетки; vк–окружная скорость коллектора.
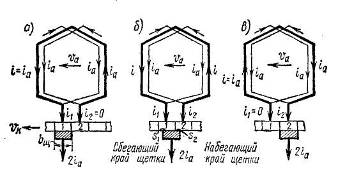
Рис. 2.29 – Направление тока в параллельных ветвях обмотки якорк (а) и график изменения тока в секции (б)
В современных машинах Тк – 0,001 ÷ 0,0001с, вследствие чего средняя скорость изменения тока в секции (di/dt)cp – 2iа/Tк очень велика. Следовательно, в секции может индуктироваться большая э.д.с. само- и взаимоиндукции, называемая реактивной э.д.с:
![]() , (2.17)
, (2.17)
где Lp–результирующая индуктивность секции, определяющая величину реактивной э.д.с.
Название «реактивная» обусловлено тем, что согласно правилу Ленца эта э.д.с. препятствует изменению тока – замедляет его.
Помимо реактивной э.д.с. в коммутируемой секции индуктируется также э.д.с. вращения ек, создаваемая внешним магнитным полем и называемая коммутирующей:
![]() , (2.18)
, (2.18)
где Вк–индукция в воздушном зазоре, в зонах, где перемещаются коммутируемые секции.
Индукция Вк может создаваться м. д. с. главных полюсов и реакции якоря, а также м. д. с. добавочных полюсов, которые устанавливают в машинах постоянного тока с целью улучшения процесса коммутации.
Установим закон изменения тока в секции в период коммутации, полагая для простоты, что ширина щетки равна ширине коллекторной пластины. На рис. 2.30 показаны три основных этапа коммутации. В первый момент времени (рис. 2.30, а) ток i в коммутируемой секции, присоединенной к пластинам 1 и 2, равен iaи направлен от пластины 2 к пластине 1. Ток щетки 2ia проходит целиком через пластину 1, т.е. i1 = 2iα и i2= 0. В промежуточном положении (рис. 2.30, б) одна часть тока щетки 2ia проходит по-прежнему через пластину 1, а другая часть – через пластину 2, причем i1 + i2 = 2iа. К концу периода коммутации (рис. 2.30, в) пластина 1 выходит из-под щетки и ток, проходящий через нее, становится равным нулю. При этом ток щетки 2ia проходит через пластину 2, т.е. i2 = 2ia и i1 = 0, а ток i в коммутируемой секции изменяет свое направление по сравнению с током в начальный момент коммутации.
Рис. 2.30 – Распределение тока в коммутируемой секции в различные моменты коммутации
Для контура коммутируемой секции, замкнутой щеткой (рис. 2.30, б), можно написать уравнение
![]() , (2.19)
, (2.19)
где i1 и i2–мгновенные значения токов, проходящих через пластины 1 и 2; i-ток в коммутируемой секции; r1 и r2–сопротивления переходного контакта между щеткой и коллекторными пластинами: сбегающей 1 и набегающей 2; rс–сопротивление секции.
Поскольку сопротивление секции всегда значительно меньше сопротивлений щеточного контакта, влияние сопротивления rс на процесс коммутации весьма незначительно и им можно пренебречь. Тогда из (2.19) получим
![]() . (2.19а)
. (2.19а)
Это уравнение называют основным уравнением коммутации. Оно является нелинейным дифференциальным уравнением с переменными коэффициентами, так как э.д.с. ер пропорциональна di/dt; э.д.с. ек является функцией Вк, сопротивления rх· и r2 являются функциями времени, а также плотности тока в щеточном контакте и скорости ее изменения, т.е. зависят от тока i и его производной.
Решение уравнения (2.19а) может быть получено при различных упрощающих предположениях. Далее изложены наиболее распространенные методы решения этого уравнения.
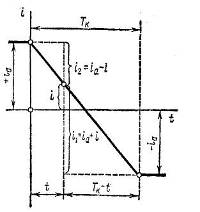
Рис. 2.31 – График изменения тока в коммутируемой секции при идеальной прямолинейной коммутации
Коммутация сопротивлением при ширине щетки, равной ширине коллекторной пластины. Из рис. 2.30, б следует, что токи il и i2, проходящие через сбегающую и набегающую коллекторные пластины,
i1 = ia + i; i2 = ia – i (2.20)
Подставляя значения i1 и i2 в уравнение (2.19а) и решая его относительно i, получим
![]() . (2.21)
. (2.21)
Если предположить, что сопротивления r1 и r2 не зависят от плотности тока и определяются только площадями соприкосновения s1 и s2 щетки с коллекторными пластинами 1 и 2, то отношение сопротивлений
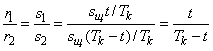 .
.
В этом случае уравнение (2.21) принимает вид
![]() . (2.21а)
. (2.21а)
Если подобрать ек так, чтобы в любой момент времени выполнялось условие
ev + eK = 0, (2.22)
то дифференциальное уравнение (2.21а) превращается в линейное алгебраическое уравнение
i = ia(1–2t/TK). (2.23)
Коммутацию, при которой ток i изменяется по линейному закону согласно (2.23), называют идеальной прямолинейной коммутацией (рис. 2.31).
Рассмотрим более подробно этот важный для практики случай коммутации. При идеальной прямолинейной коммутации сбегающая коллекторная пластина 1 выходит из-под щетки без разрыва тока, так как
i1 = ia + i = ia + ia(1–2t/TK) = 2ia (1 – t/TK),
и в момент времени t = Тк ток i1 = 0 (весь ток 2iа проходит через пластину 2). Следовательно, под сбегающим краем щетки искрение возникать не будет. Кроме того, в рассматриваемом случае плотность тока под щеткой в местах соприкосновения ее с пластинами 1 и 2 остается все время постоянной и равной среднему значению: Δщ1 = Δща==2iа/Sщ = const. Так, например, в месте контакта щетки с коллекторной пластиной 1
![]() . (2.24)
. (2.24)
Аналогично, для коллекторной пластины 2
![]() . (2.24а)
. (2.24а)
Непосредственно плотность тока мало влияет на интенсивность искрения, однако равномерное распределение тока под щеткой способствует уменьшению потерь в щеточном контакте и поэтому считается положительным фактором.
Идеальная прямолинейная коммутация положена в основу инженерных методик расчета коммутации, предложенных рядом авторов. Главным условием этого расчета является взаимная компенсация мгновенных значений реактивной э.д.с. eр и э.д.с. ек, создаваемой внешним полем.
В рассмотренном случае при прямолинейной коммутации di/dt = const, поэтому
 , (2.25)
, (2.25)
т.е. реактивная э.д.с. является величиной постоянной, равной среднему значению ер.ср. Следовательно, при расчетах коммутации компенсация мгновенного значения реактивной э.д.с. сводится к компенсации среднего значения ер.ср.
Коммутация за счет э. д. с, создаваемой внешним полем. При выводе уравнения прямолинейной коммутации было принято произвольное допущение, что сопротивление щеточного контакта не зависит от плотности тока. Может быть предложена и другая методика анализа коммутации, при которой пренебрегается влиянием щеточного контакта. Действительно, проведенные эксперименты показывают, что в крупных машинах при удовлетворительной коммутации разница в падениях напряжения и1 – i1r1 и u2 = i2r2 в щеточном контакте составляет менее 0,5 В, в то время как э.д.с. ек превышает 3–4 В, достигая в отдельных случаях 8–10 В. Поэтому предложенное в рассматриваемой методике допущение является вполне обоснованным и основное уравнение коммутации (2.19а) может быть записано в виде
ep + eK = i1r1 – i2r2» 0. (2.26)
Подставляя в уравнение (10.26) значение реактивной э.д.с. ер = – Lрdi/dt и решая его относительно i, получим
 . (2.27)
. (2.27)
Следовательно, величина и характер изменения тока i в коммутируемой секции в основном определяются коммутирующей э.д.с.
Условием безыскровой коммутации, как и в предыдущем случае, является выход сбегающей коллекторной пластины из-под щетки без разрыва тока, для чего необходимо, чтобы (i1)t=Tк = 0 или (i)t=Tк = – ia
Согласно теореме о среднем из (2.27) имеем
![]() . (2.27а)
. (2.27а)
Постоянную интегрирования С находим из начальных условий. Так как в начальный момент при t = 0 ток коммутации (i)t=0 = ia, то согласно (2.27) получим C = ia. Положив (i)t=Tк = – ia, найдем условие безыскровой коммутации:
![]() , (2.28)
, (2.28)
Откуда
![]() . (2.29)
. (2.29)
Таким образом, для осуществления безыскровой коммутации необходима компенсация среднего значения реактивной э.д.с. в процессе коммутации. Если внешнее поле сделать постоянным, т.е. ек = ек-ср, то
 . (2.30)
. (2.30)
Следовательно, в этом, практически важном, простейшем случае обе методики дают тождественные результаты.
В расчетной практике для определения среднего значения реактивной э.д.с. в секции обмотки якоря часто используют упрощенную формулу, которая может быть получена из (2.29). Для этого ток параллельной ветви ia выражают через линейную нагрузку якоря
![]() ,
,
а период коммутации Тк – через линейную скорость якоря va и число коллекторных пластин K:
![]() . (2.31)
. (2.31)
В последних формулах N = 2Kωc–число активных проводников обмотки якоря; Da и Dк–диаметры якоря и коллектора; K-число коллекторных пластин; ωc–число витков в секции.
В результате получим реактивную э.д.с.
![]() . (2.32)
. (2.32)
Индуктивность секции
![]() , (2.33)
, (2.33)
где Λр–магнитная проводимость для потоков рассеяния секции: пазового Фп; по лобовым частям Фs и дифференциального Фz (по коронкам зубцов) – рис. 2.32, а; lа – li – активная длина якоря (при расчете магнитной проводимости берется удвоенная длина якоря); λр–удельная магнитная проводимость на единицу длины секции.
Поэтому формула (2.32) принимает вид
ep = 2lawcAvaλp. (2.32а)
Удельная проводимость секции с достаточной степенью точности может быть принята равной при открытых (рис. 2.32, б) и полузакрытых (рис. 2.32, в) пазах:
 , (2.34)
, (2.34)
где hп и bп – высота и средняя ширина паза; hш и bш–высота и ширина щели паза; ls – длина лобовой части секции.
Обычно значения λр = 4 ÷ 8.
На рис. 2.33, а показаны зависимости изменения тока в коммутируемой секции во времени при пренебрежении падениями напряжения i1r1 и i2r2 в щеточном контакте. Идеальной прямолинейной коммутации, т.е. условию eр.ср + ек.ср = 0, соответствует прямая 1.
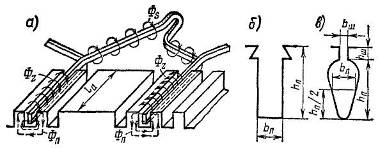
Рис. 2.32 – Потоки рассеяния секции (а) и размеры паза, определяющие удельную проводимость секции (б, в)
В действительности при работе машины всегда имеются причины, вызывающие неполную компенсацию реактивной э.д.с., т.е. отклонение от условия ер.ср + ек.ср = 0. К этим причинам относятся: технологические допуски при изготовлении коллектора, установке щеткодержателей, установке добавочных полюсов и т.п.; резкие толчки тока нагрузки, перегрузки по току, превышения номинальной частоты вращения, вибрация машины и другие эксплуатационные причины; нестабильность щеточного контакта, из-за которой постоянно изменяется площадь контакта щетки с коллектором (период коммутации Тк) или происходит полный отрыв щетки от коллектора.
Если |ек.ср| < |ер.ср|, то коммутация замедляется, так как согласно правилу Ленца э.д.с. ер замедляет изменение тока i. Обозначив степень некомпенсации э.д.с. через Δ = [|ер.ср| – |ек.ср|]/ep.ср|, получим
![]() . (2.35)
. (2.35)
При этом закон изменения тока в коммутируемой секции [см. (2.30)]
 . (2.36)
. (2.36)
При замедленной коммутации (рис. 2.33, а, прямая 2) в момент окончания коммутации при t = Tк щетка разрывает некоторый остаточный ток iост, вследствие чего между сбегающим краем щетки и сбегающей коллекторной пластиной возникает электрическая дуга. Величина остаточного тока
![]() , (2.37)
, (2.37)
или с учетом (2.36)
![]() . (2.37a)
. (2.37a)
Электромагнитная энергия Wи, выделяющаяся в дуге, возникающей при разрыве остаточного тока, может характеризовать степень искрения. Для рассматриваемого простейшего случая
![]() . (2.38)
. (2.38)
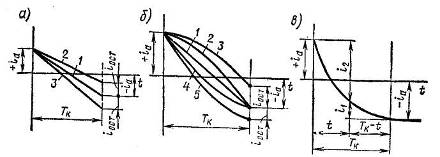
Рис. 2.33 – Кривые изменения тока в коммутируемой секции в течение периода коммутации Тк при пренебрежении сопротивлением щеточного контакта (а) и его учете (б, в)
При ускоренной коммутации (рис. 2.33, а, прямая 3), когда |ек.ср| > |ер.ср|, ток в коммутируемой секции изменяется по закону
 , (2.36а)
, (2.36а)
т.е. быстрее, чем это требуется для безыскровой работы щеток. Сбегающий край щетки и при ускоренной коммутации разрывает остаточный ток iост, а следовательно, и в этом случае будет наблюдаться искрение щетками.
Учет падения напряжения в щеточном контакте.
При построении кривых изменения тока (рис. 2.33, а) не учитывалось падение напряжения в щеточном контакте. В действительности при быстром увеличении плотности тока под сбегающим краем щетки сопротивление щеточного контакта резко возрастает, что ведет к уменьшению остаточного тока или полному его устранению, даже в том случае, когда коммутация отличается от идеальной. Типичные кривые изменения тока в коммутируемой секции с учетом влияния сопротивления щеточного контакта приведены на рис. 2.33, б. При незначительном расстройстве коммутации замедление коммутации (кривая 2) или ее ускорение (кривая 4) не приводят к разрыву сбегающим краем щетки остаточного тока. Только значительное замедление (кривая 3) или значительное ускорение (кривая 5) коммутации приводят к возникновению опасного искрения.
При замедленной коммутации уменьшение остаточного тока происходит под действием разности падений напряжений u1 и u2 (см. рис. 2.30) под сбегающим и набегающим краями щетки:
![]() . (2.39)
. (2.39)
При ускоренной коммутации на завершающем этапе, когда ток изменяет свое направление, в уравнение (2.39) входит сумма падений напряжения
![]() . (2.39а)
. (2.39а)
При этом к концу процесса коммутации резко уменьшается ток i1, т.е. коммутируемая секция заканчивает коммутацию с так называемой ступенью малого тока (рис. 2.33, в), при которой допустима большая разница между ер и ек. Поскольку в эксплуатации появление погрешности коммутации как в одну, как и в другую сторону (т.е. ускоренная и замедленная коммутация) равновероятно, при расчете и наладке машины предпочитают иметь слегка ускоренную коммутацию. Для того чтобы усилить благоприятные влияния падений напряжений u1 + u2 на процесс коммутации, в мощных машинах постоянного тока с затрудненной коммутацией применяют щетки с большим переходным сопротивлением, несмотря на то, что это увеличивает потери мощности в переходном контакте.
Закономерности коммутации, рассмотренные на простейшем примере, в основном сохраняются и для более сложных случаев, когда щетка перекрывает несколько коллекторных пластин и в пазу находится несколько секций. Однако имеются и некоторые отличия от простейшего случая.
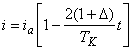
Общий случай коммутации при ширине щетки, большей коллекторного деления и нескольких проводниках, лежащих в пазу. В общем случае, когда щетка 1 перекрывает несколько коллекторных пластин (рис. 2.34, а), изменение тока происходит одновременно в нескольких секциях 2, лежащих в одном или нескольких пазах. На рис. 2.34, б изображена диаграмма коммутации секций одного паза для обмотки, показанной на рис. 2.34, а. Прямоугольники 3, 4, 5 и 6 показывают распределение во времени индуктивностей Lc секций, которые приняты равными их взаимоиндуктивностям Мс. Ширина каждого прямоугольника равна периоду коммутации
![]() , (2.40)
, (2.40)
где γ = bщ/bк – коэффициент щеточного перекрытия (число коллекторных пластин, перекрываемых щеткой); bк = πDк/K-коллекторное деление–расстояние между серединами соседних коллекторных пластин.
Изменение токов i1, i2, i3 и i4 в рассматриваемых секциях происходит со сдвигом во времени
![]() . (2.41)
. (2.41)
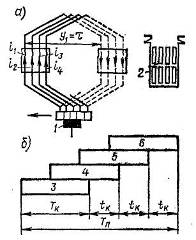
Рис. 2.34 – Коммутация при перекрытии щеткой нескольких коллекторных пластин (а) и диаграмма коммутации секции одного паза (б)
Время коммутации всех ип секций, лежащих в каждом слое паза, при диаметральном шаге обмотки якоря
![]() . (2.42)
. (2.42)
Коммутация секций происходит в зоне коммутации, т.е. по дуге окружности якоря, в пределах которой перемещаются стороны секции, лежащие в пазах, во время коммутации. Ширину этой зоны bз.к (рис. 2.35, а) можно получить, если умножить время Тп на окружную скорость якоря va:
![]() . (2.43)
. (2.43)
Ее можно также выразить через ширину щетки и коллекторное деление:
![]() . (2.43а)
. (2.43а)
Из рис. 2.34, б следует, что в рассматриваемом случае одновременно может происходить коммутация секций двух пазов: когда начинается коммутация секций любого n-го паза, продолжается коммутация секций предшествующего (п-1) – го паза; заканчивается же коммутация секций n-го паза, когда уже замкнуты накоротко некоторые секции (п + 1) – го паза. Таким образом, при исследовании процесса изменения тока в любой коммутируемой секции нужно учитывать индуктивное влияние секций, расположенных в том же и в соседних пазах. Для каждой из коммутируемых секций можно написать уравнение
![]() , (2.44)
, (2.44)
где ек – коммутирующая э. д. с, создаваемая внешним полем (э.д.с. вращения); – Lcdi/dt-э.д.с. самоиндукции, возникающая при изменении тока в секции (индуктируемая потоком рассеяния ФL, рис. 2.35, б); –∑Mкdiк/dt-э.д.с. взаимоиндукции, возникающие в рассматриваемой секции в результате влияния других коммутируемых секций (индуктируемые потоками взаимоиндукции Ф'м и Ф"м рис. 2.35, б); Мк – взаимоиндуктивность рассматриваемой секции с другой секцией, коммутируемой одновременно; iк–ток в секциях, коммутируемых одновременно; ∑ir – сумма падений напряжений в сопротивлениях коммутируемой секции.
Аналитическое решение уравнения (2.44) невозможно, так как входящие в него индуктивности и сопротивления являются нелинейными, а сопротивления r зависят, кроме того, от характера коммутации.
Рассмотрим процесс коммутации в общем виде и определим среднюю скорость изменения тока во всех секциях якоря. При этом воспользуемся следующими соображениями. За время, соответствующее повороту якоря на одно полюсное деление (рис. 2.35, а)
![]() ,
,
происходит изменение направления тока во всех секциях S = N/(2ωc) обмотки якоря, т.е. приращение тока в секциях
![]() .
.
Следовательно, средняя скорость изменения тока во всех секциях обмотки якоря
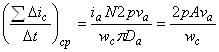 . (2.45)
. (2.45)
Так как изменение тока в секциях происходит только в период коммутации, выражение (2.45) определяет среднюю скорость изменения тока во всех коммутируемых секциях машины. Однако при анализе коммутации обычно рассматривают секции, находящиеся в одной зоне коммутации bз.к, т.е. коммутируемые одной щеткой.
При этом условии
 . (2.45а)
. (2.45а)
Если принять скорость изменения тока в зоне коммутации постоянной, то постоянным будет и и полный ток, проходящий во всех секциях, которые расположены в этой зоне, вследствие чего поток взаимоиндукции Ф'м + Ф"м, замыкающийся через главные и добавочные полюсы (рис. 2.35, б), будет постоянным. При этом условии взаимоиндукция соседних пазов проявляется только при скорости изменения тока в коммутируемых секциях, отличной от средней. Индуктивность же, обусловленная потоками рассеяния ФL, сказывается при любой скорости изменения тока.
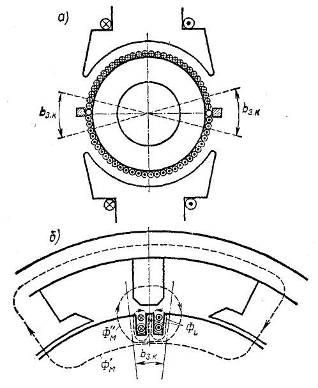
Рис. 2.35 – Положение коммутационной зоны (а) и магнитные потоки, создаваемые в ней коммутируемыми секциями (б)
Наличие сравнительно больших потоков взаимоиндукции Ф'м и Ф"м, обусловливает постоянство средней скорости изменения полного тока в зоне коммутации, так как при любом отклонении от этого закона в коммутируемых секциях индуктируется большая э.д.с. взаимоиндукции
 ,
,
стремящаяся ликвидировать указанное отклонение. Это теоретическое положение было впервые выдвинуто Л. Дрейфусом и в дальнейшем подтверждено подробными экспериментами Н.В. Волошина и В.Н. Безрученко.
В простейшем случае одновременной коммутации нескольких секций, каждая из которых занимает отдельный паз, для любой коммутируемой секции можно написать уравнение
 , (2.46)
, (2.46)
где Lc–индуктивность, обусловленная потоком рассеяния ФL секции; Мк – взаимоиндуктивность, обусловленная суммарным потоком взаимоиндукции Ф'м + Ф"м или с учетом (2.45а)
 . (2.46а)
. (2.46а)
Суммируя уравнения для всех коммутируемых секций и пренебрегая разностью падений напряжений под щеткой, получим
 , (2.47)
, (2.47)
где ∑ек = ек1 + ек2 + ек3+ · · · екn, n – одно из целых чисел, ближайших к числу γ коллекторных пластин, перекрываемых щеткой.
Примем ек1 = ек2 = ек3= · · · = екn = ек.ср и усредним число коротко-замкнутых секций. Тогда, полагая п = γ, запишем:
 . (2.47а)
. (2.47а)
Поскольку проводимость для суммарного потока взаимоиндукции Ф'м + Ф"м во много раз больше проводимости для потока рассеяния ФL, т.е. Mк>>Lс, и практически, как показали экспериментальные исследования, d∑iк/dt = Avа/ωс = const, получим
![]() , (2.47б)
, (2.47б)
Откуда
![]() . (2.48)
. (2.48)
Сравнивая выражения (2.48) и (2.32), можно установить, что перекрытие щеткой нескольких коллекторных пластин уменьшает величину ек.ср. Это объясняется тем, что увеличивается период коммутации Tк=γπDa/(Kva), а следовательно, снижается средняя величина реактивной э.д.с.
![]() . (2.49)
. (2.49)
Таким образом, и для рассмотренного случая условие безыскровой коммутации будет иметь вид ер.ср + ек.ср. = 0. При выполнении его ток в секции за период коммутации изменяется на величину
 , (2.50)
, (2.50)
и коллекторная пластина выходит из-под щетки без разрыва тока. Такую коммутацию называют среднепрямолинейной.
В каждом слое паза якоря реальной машины находится несколько секций, что дает возможность выполнять для них общую изоляцию относительно корпуса, а это увеличивает коэффициент заполнения паза медью и значительно снижает габариты машины и ее стоимость. Секции, расположенные в одних и тех же пазах, имеют хорошую магнитную связь; индуктивность их Lc приблизительно равна взаимоиндуктивности Мп. Поэтому выход из-под щетки коллекторных пластин, связанных со всеми секциями паза, кроме последней, не вызывает электрической дуги даже при разрыве тока, так как малы переходная индуктивность и энергия, выделяющаяся в дуге. Это явление хорошо известно и в практике эксплуатации коллекторных машин – подгорают пластины коллектора, кратные числу секций в пазу. По указанной причине некоторые исследователи коммутации предлагали последнюю секцию в пазу называть самостоятельной, а те секции, которые не вызывают искрения, – несамостоятельными. Следовательно, при расчете коммутации следует стремиться к тому, чтобы не рвался ток при выходе из-под щетки пластины, связанной с самостоятельной секцией, т.е. заканчивающей коммутацию в пазу.
Для каждой из коммутируемых секций, лежащих в одном слое рассматриваемого паза, можно написать уравнение
 , (2.51)
, (2.51)
где Мп–взаимоиндуктивность рассматриваемой секции с другими коммутируемыми секциями, лежащими в одном и том же слое данного паза; Мк–взаимоиндуктивность рассматриваемой секции с другими коммутируемыми секциями, лежащими в соседних пазах. Так как Lc = Mn, то
 . (2.51а)
. (2.51а)
Обозначая полный ток во всех секциях, лежащих в каждом слое, через iп = i1 + i2 + · · · + in получаем
 . (2.52)
. (2.52)
Уравнение (2.52) по форме соответствует уравнению (2.46а), т.е. коммутацию нескольких секций, лежащих рядом в одном пазу, можно рассматривать как коммутацию одной секции, имеющей начальный ток iп в течение времени Тп.
Средняя величина реактивной э.д.с. при коммутации всех секций, лежащих в каждом слое паза, с учетом (2.42):
![]() . (2.53)
. (2.53)
Соответственно из условия ер.ср + ек.ср = 0 должна выбираться и средняя величина коммутирующей э.д.с.
Обычно γ < uп, что обусловливает некоторые особенности коммутации. Типичная диаграмма изменения тока паза in при коммутации показана на рис. 2.36, а. На первом этапе, когда начинается коммутация секций n-го паза, продолжается коммутация секций предшествующего (n-1) – го паза.
Из условия средне прямолинейной коммутации имеем
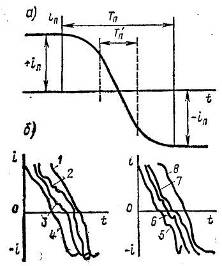
Рис. 2.36 – График изменения тока паза (а) и распределение тока между отдельными секциями паза (б) в процессе коммутации:
1 – 4 – токи в сторонах секций верхнего слоя паза,
5 -8 – то же, нижнего слоя паза
![]() , (2.54)
, (2.54)
Поэтому
![]() . (2.54а)
. (2.54а)
Иными словами, наличие коммутирующих секций в предшествующем пазу уменьшает скорость изменения тока в секциях рассматриваемого паза. В течение времени Т'п, когда происходит коммутация секции только n-го паза, скорость изменения тока iп максимальна и равна (diп/dt)n = Avа/ωс.
Когда начинается процесс коммутации в секциях последующего (n+1) – го паза, скорость изменения тока снова замедляется:
![]() (2.54б)
(2.54б)
Токи между пазами, в которых находятся коммутируемые секции, распределяются соответственно величинам коммутирующих э.д. с. и количеству секций, находящихся в режиме коммутации. Распределение токов между короткозамкнутыми секциями одного паза определяется в основном их активными сопротивлениями, включая сопротивление щеточного контакта. Оно носит в значительной мере случайный характер (рис. 2.36, б), что объясняется нестабильностью щеточного контакта.
В рассматриваемом случае величина остаточного тока, возникающего при нарушениях коммутации,
![]() ,
,
а электромагнитная энергия, выделяющаяся на дуге при искрении, связанном с разрывом остаточного тока,
![]() .
.
Способы улучшения коммутации. В современных машинах основным средством улучшения коммутации является применение добавочных полюсов, при помощи которых в коммутационной зоне создается магнитное поле, индуктирующее коммутирующую э.д.с. ек.ср требуемой величины. Только в машинах малой мощности (менее 300 Вт) удается обойтись без добавочных полюсов.
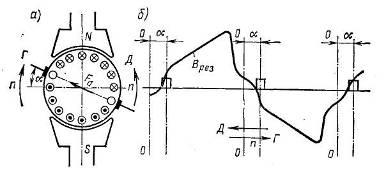
Рис. 2.37 – Сдвиг щеток с геометрической нейтрали (а) и кривая результирующего магнитного поля в зоне установки щеток (б)
Создание коммутирующей э.д.с. путем сдвига щеток с геометрической нейтрали 0–0 на некоторый угол α за физическую нейтраль (рис. 2.37), так чтобы коммутируемые секции оказались в зоне действия магнитного поля с индукцией Врез требуемой величины и направления, применяется крайне редко. В этом случае удается добиться безыскровой работы машины только для одного направления вращения и при одной определенной нагрузке. Изменять же сдвиг щеток в зависимости от направления вращения и режима работы машины практически очень сложно.
Добавочные полюсы устанавливают между главными полюсами (рис. 2.38). Они создают в зоне коммутации магнитное поле с индукцией Вк такой величины, чтобы при вращении якоря в коммутируемых секциях индуктировалась э.д.с. ек.ср = – ер.ср.
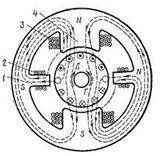
Рис. 2.38 – Расположение добавочных полюсов в машине:
1 – добавочные полюсы, 2 – обмотка добавочных полюсов, 3 – обмотка возбуждения, 4 – главные полюсы
Обмотку добавочных полюсов включают последовательно в цепь якоря, а магнитную систему выполняют ненасыщенной. Поэтому коммутирующая э.д.с. ек.ср оказывается пропорциональной току якоря и его линейной скорости va, которая в свою очередь пропорциональна частоте вращения:
![]() . (2.55)
. (2.55)
Следовательно, э.д. с. ек.ср изменяется по такому же закону, как и реактивная э.д. с:
![]() . (2.56)
. (2.56)
Поэтому если осуществить взаимную компенсацию э.д.с. ер.ср + ек.ср = 0 для какого-то одного режима работы, то их компенсация автоматически обеспечивается и при других режимах. Полярность добавочных полюсов зависит от направления вращения и режима работы машины. В генераторном режиме полярность добавочного полюса должна быть такой же, как у следующего за ним по направлению вращения главного полюса; в двигательном режиме – как у предшествующего ему по направлению вращения главного полюса.
Сердечники добавочных полюсов изготовляют обычно массивными из стальной поковки, хотя иногда применяют и шихтованные, из листов электротехнической стали. Последнее делается в тех случаях, когда в токе якоря имеются переменные составляющие (двигатели пульсирующего тока и т.д.), для того чтобы и э.д.с. ек тоже имела переменные составляющие, пропорциональные току якоря.
Величина индукции Вк под добавочным полюсом обычно мала, так как мала и средняя величина коммутирующей э.д.с. – ек.ср =3 ÷ 10 В. Однако м.д.с. обмотки добавочных полюсов должна быть очень большой, так как она направлена против поперечной составляющей Faq = τA м.д.с. реакции якоря. Поэтому обмотка каждого полюса должна иметь м.д.с.
![]() , (2.57)
, (2.57)
где Вк–индукция в воздушном зазоре под добавочными полюсами, которая вычисляется по (2.55) при условии |ек.ср|; = |ер.ср|; δдоб и kδдоб–величина и коэффициент воздушного зазора под добавочными полюсами.
При расчете м.д.с. добавочных полюсов обычно не учитывается возможность получения несколько ускоренной коммутации, так как требуемое ускорение достигается регулировкой воздушного зазора при наладке машины.
Из-за значительной величины м. д. с. Fдo6 поток рассеяния добавочного полюса очень велик и превышает в 2–4 раза полезный поток, замыкающийся через якорь. Для уменьшения потока рассеяния, который может вызвать насыщение сердечника добавочного полюса, в крупных машинах делают второй зазор δдоб2 (рис. 2.39, а), устанавливая диамагнитные прокладки между сердечником полюса и ярмом. В этом случае
![]() , (2.58)
, (2.58)
где Bк1 и Вк2–индукции в основном и втором зазорах; kδдоб1 – соответствующий коэффициент воздушного зазора; δдоб1 и δдоб2–величины этих зазоров.
При наличии компенсационной обмотки требуемая м.д.с. добавочного полюса резко уменьшается, так как м. д. с. компенсационной обмотки Fк.о действует против м.д.с. Faq реакции якоря:
![]() . (2.58а)
. (2.58а)
Это позволяет (для уменьшения потоков рассеяния) сосредоточить обмотку добавочного полюса у якоря (рис. 2.39, б). Ширину наконечника добавочного полюса в малых машинах выбирают равной ширине зоны коммутации: bдоб ≈ bз.к.
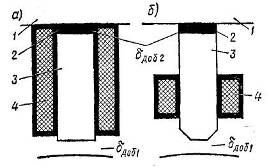
Рис. 2.39 – Формы сердечников и расположение на них катушек обмотки добавочных полюсов:
1-корпус (станина), 2 – диамагнитная прокладка,
3 – сердечник, 4 – катушка
В крупных машинах с напряженной коммутацией ширину наконечника добавочного полюса выбирают относительно узкой: bдоб = (0,3 ÷ 0,6) bз.к – При такой ширине добавочного полюса распределение индукции в зоне коммутации имеет вид, показанный на рис. 2.40, вследствие чего коммутирующая э.д.с. в начале зоны коммутации и в конце значительно ниже среднего значения. Это приводит к тому, что первая секция паза вступает в коммутацию, а последняя секция выходит из нее со «ступенью малого тока» (см. рис. 2.33, в), что благоприятно сказывается на коммутации, так как предотвращает разрыв тока при случайном нарушении контакта между пластиной и сбегающим краем щетки. Узкие добавочные полюсы требуют повышенной точности сборки машины и установки щеток, поэтому в машинах малой и средней мощности их не применяют.
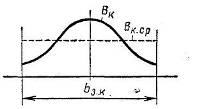
Рис. 2.40 – Кривая распределения индукции в воздушном зазоре под добавочным полюсом при узком полюсном наконечнике
Необходимость обеспечения удовлетворительной коммутации накладывает определенные ограничения на габаритные размеры и конструкцию машин постоянного тока. Практика электромашиностроения показывает, что можно добиться безыскровой коммутации лишь тогда, когда реактивная э.д. с. в номинальном режиме не превосходит некоторого предельного значения. Поэтому в крупных машинах и машинах, работающих при высоких частотах вращения, применяют одновитковые секции и делают неглубокие пазы (не более 4–6 см в самых мощных машинах) с целью уменьшения индуктивности секции. В ряде случаев для уменьшения реактивной э.д.с. приходиться ограничивать активную длину якоря и его окружную скорость. Все эти меры приводят либо к снижению мощности машины при заданных габаритах, либо к увеличению ее размеров и массы (при заданной мощности). Поэтому машины постоянного тока имеют меньшую мощность, чем машины переменного тока тех же габаритов; при мощности 100–1000 кВт уменьшение составляет 20–25%. Попытки увеличить мощность, допустив увеличение степени искрения на коллекторе, приводят к резкому возрастанию эксплуатационных расходов. Условия коммутации ограничивают также предельную мощность, на которую может быть построена машина постоянного тока (при заданной частоте вращения).
Чтобы уменьшить влияние технологических отклонений и вибраций щеток на качество коммутации, применяют обмотки с укороченным шагом и ступенчатые обмотки. В этих обмотках последняя секция паза одного слоя, заканчивая коммутацию, оказывается магнитно связанной с секцией другого слоя, которая остается замкнутой щеткой. Вследствие этого под щеткой выделяется только часть электромагнитной энергии остаточного тока
![]() , (2.59)
, (2.59)
а другая часть энергии
![]() (2.59а)
(2.59а)
передается в короткозамкнутую секцию.
Поскольку технологические отклонения равновероятны в ту и другую стороны, недокомпенсация реактивной э.д.с. ер.ср сменяется перекомпенсацией и поэтому накопления энергии Wи не происходит. Коэффициент связи kсв = Mс/Lc у секций с укороченным шагом достигает значения kсв = 0,4 ÷ 0,6 (с учетом взаимной связи лобовых соединений), благодаря чему существенно уменьшается искрение под щетками. Однако при длительных нарушениях коммутации, когда погрешность Δ = [|ер.ср| – |ек.ср|/|ер.ср| имеет один знак для трех-пяти пазов, последовательно заканчивающих коммутацию, взаимоиндуктивность указанных секций не имеет значения, так как коммутация секций одного паза не может улучшаться за счет коммутаций секций другого паза (если секции всех пазов коммутируют в одинаковых условиях). Преимуществом ступенчатых обмоток является также и то обстоятельство, что при их использовании происходит более равномерный износ коллектора, так как в пазу имеются две самостоятельные секции, а следовательно, и электромагнитная энергия, выделяющаяся при разрыве остаточного тока паза распределяется на две коллекторные пластины (соответственно уменьшается их износ). Недостатком ступенчатых обмоток является сложность обеспечения «темной» коммутации, так как условия коммутации двух самостоятельных секций требуют, в общем случае, различной величины коммутирующей э.д.с. Таким образом, ступенчатые обмотки можно рекомендовать только при очень сложных условиях эксплуатации, характеризующихся работой с частыми нарушениями коммутации (толчкообразная нагрузка и т.д.).
Заметное улучшение коммутации происходит также из-за возникновения в проводниках обмотки якоря вихревых и контурных (в сложных обмотках) токов. Часть нескомпенсированной энергии коммутируемых секций выделяется в виде тепла, создаваемого вихревыми токами, что должно быть учтено при расчете, путем уменьшения результирующей индуктивности секции.
Уменьшению искрения способствует увеличение длины коллектора, однако это ведет к увеличению габаритов и длины машины. Плотность тока под щетками не играет существенного значения, однако не следует выбирать ее чрезмерной, так как при перегрузках возможен перегрев отдельных коллекторных пластин. Особенно опасно это явление для двигателей постоянного тока, работающих в условиях затяжных пусков (например, для тяговых двигателей электровозов, экскаваторов и т.п.). Во избежание перегрева отдельных пластин и возникновения деформации коллектора плотность тока под щетками при длительных перегрузках таких машин не должна превышать 20 А/см2.
Важную роль в процессе коммутации играют щетки, которые по своей физической природе являются нелинейными сопротивлениями. При быстром увеличении плотности тока под сбегающим краем щетки сопротивление щетки резко возрастает, что ведет к уменьшению остаточного тока или полному его устранению, даже в случае, когда коммутация является неидеальной. В электрических машинах большой и средней мощностей применяют электрографитированные щетки с большим падением напряжения в скользящем контакте (2,4–3,5 В на пару щеток). Такие щетки получают в электропечах путем нагревания заготовок из угля и кокса до температуры 2000–2500° С, при этом они принимают структуру графита, а поэтому называются электрографитированными. На рис. 2.41 показаны типичные зависимости падения напряжения 2Δищ в контакте «коллектор – щетка» от плотности тока Δщ для электрографитированных (кривая 1) и угольно-графитных (кривая 2) щеток. Соответствующим выбором марки щетки часто удается улучшить коммутацию машины. В тихоходных машинах применяют твердые щетки с наибольшим переходным сопротивлением. Для быстроходных машин (при линейной скорости 40 м/с и выше) приходится брать мягкие щетки, хотя они быстрее изнашиваются и имеют меньшее переходное сопротивление.
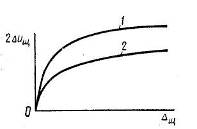
Рис. 2.41 – Зависимости падения, напряжения под щетками от плотности тока
Таблица 2.2
| Типы щеток | Марка | Номинальная плотность тока, А/см2 | Переходное падение напряжения на пару щеток, В | Окружная скорость, м/с | Удельное нажатие, Н/см2 | Коэффициент трения | Область применения |
| Угольно-графитные | УГ4 | 7 | 2 | 12 | 2–2,5 | 0,25 | Для генераторов и двигателей со средними условиями коммутации |
| Графитные | 611М | 10–12 | 2 | 40 | 2 – 2,5 | 0,25 | Для генераторов и двигателей с облегченными условиями коммутации |
| Элек-трогра-фитиро-ванные | ЭГ2А ЭГ4 ЭГ8 ЭГ14 | 10 12 10 10–11 | 2,6 2 2,4 2,5 | 45 40 40 40 | 2–2,5 1,5–2 2–4 2–4 | 0,23 0,25 0,25 0,25 | Для генераторов и двигателей со средними и затрудненными условиями коммутации |
| Медно-графит-ные | МГ2 МГ4 | 20 15 | 0,5 1,1 | 20 20 | 1,8–2,3 2–2,5 | 0,2 0,2 | Для низковольтных генераторов и контактных колец |
Технические данные наиболее часто используемых марок щеток и области их применения приведены в табл. 2.2. Подбор щеток обычно производится экспериментально.
На характер коммутации оказывает также влияние дифференциальный поток рассеяния, проходящий по коронкам зубцов, и поток главных полюсов.
Дифференциальный поток рассеяния по коронкам зубцов Фz (см. рис. 2.42, а) замыкается через сердечник добавочного полюса. При вращении якоря изменяется положение середины паза с коммутируемыми секциями относительно сердечника (см. положения паза, показанные на рис. 2.42, а, б), что приводит к изменению потока Фz и периодическому изменению индуктивности секции Lc.
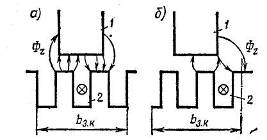
Рис. 2.42 – Изменение дифференциального потока рассеяния, проходящего по коронкам зубов, при перемещении паза с коммутируемыми секциями:
1 – сердечник добавочного полюса, 2 – паз
Величина реактивной э.д.с. будет при этом определяться выражением
![]() (2.60)
(2.60)
и может существенно отличаться от средней э.д.с. ер.ср. В результате возникает искрение под щетками. Для уменьшения дифференциального потока рассеяния целесообразно увеличивать зазор под добавочным полюсом. В машинах большой мощности этот зазор обычно делают равным 8 – 15 мм, соответственно увеличивая число витков обмотки добавочных полюсов. Иногда, для того чтобы уменьшить скорость изменения потока Фz, на наконечники дополнительных полюсов устанавливают короткозамкнутые витки. Такой виток выполняют из меди или бронзы в виде фланца; он одновременно служит конструктивной деталью, крепящей катушку добавочного полюса. Однако, улучшая коммутацию в стационарных режимах, короткозамкнутые витки будут ухудшать коммутацию при резких изменениях тока якоря.
Влияние главных полюсов на процесс коммутации заключается в том, что поток Фв, созданный обмоткой возбуждения, частично попадает в зону коммутации. При симметричной магнитной системе и чередующейся полярности главных полюсов, как это обычно имеет место, величина результирующего потока в зоне коммутации не изменяется, т.е. сохраняется условие ер.ср + ек.ср = 0. Однако поле в зоне коммутации деформируется, усиливаясь, с одной стороны, и уменьшаясь, с другой. На рис. 2.43 показано распределение индукции Вк в зоне коммутации: а – созданной м.д. с. Fдo6 добавочных полюсов; б – созданной м.д.с. Fв главных полюсов; в-результирующего магнитного поля. Нарушение симметрии магнитного поля в зоне коммутации приводит к неблагоприятному характеру коммутации; при этом токосъем переносится на край щетки[3].
Еще большие расстройства коммутации могут возникнуть из-за нарушения магнитной симметрии машины, например, в результате технологических отклонений при установке щеткодержателей, главных или добавочных полюсов, когда изменяется поле в зоне коммутации. Чтобы уменьшить влияние поля главных полюсов на процесс коммутации, снижают величину полюсного перекрытия αi = bi/τ, так чтобы соблюдалось условие (1–αi)τ ≥ 2,5bз.к В машинах малой мощности, кроме того, увеличивают ширину наконечника добавочного полюса, который «экранирует» зону коммутации от потока главного полюса.
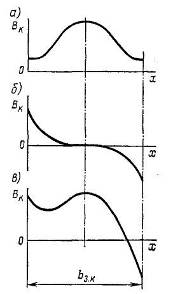
Рис. 2.43 – Распределение индукции Вк в зоне коммутации
В машинах с компенсационной обмоткой м.д. с. главных полюсов меньше, а следовательно, влияние поля главных полюсов на процесс коммутации меньше. Это позволяет несколько увеличивать полюсную дугу, т.е. коэффициент полюсного перекрытия αi.
Особенно велико влияние поля главных полюсов на коммутацию в машинах с несимметричной магнитной системой и в машинах с расщепленными полюсами. При этом изменение потока возбуждения приводит к изменению результирующего потока в коммутационной зоне, а следовательно, и к изменению среднего значения коммутирующей э.д.с. Это обстоятельство затрудняет создание мощных машин с расщепленными полюсами (электромашинных усилителей и регулируемых одноякорных преобразователей).
Оценка коммутационной напряженности машины. Качество коммутации проверяется визуально или при помощи специальных приборов (индикаторов искрения) во время контрольных стендовых испытаний. Однако часто, чтобы составить прогноз работы машины в эксплуатации, необходимо оценить напряженность коммутации теоретически. Такая необходимость возникает как при проектировании машины, так и при выборе типа машины для определенного технологического процесса, характеризующегося величиной и частотой перегрузок, вибрациями машины, частотой пусков, реверсов и т.д.
Наиболее распространенным критерием напряженности коммутации является средняя величина реактивной э. д. с, так как искрение возникает из-за неполной ее компенсации. Однако вполне определенного допускаемого значения реактивной э.д.с. установить не удалось, и различные заводы и фирмы придерживаются своих норм, ограничивая значение этой э.д. с. 3–10 В. Так, например, по рекомендациям завода «Электросила» в машинах большой мощности с петлевой и лягушачьей обмотками реактивная э.д.с. ер.ср при номинальной нагрузке не должна превосходить 7–10 В (меньшие значения относятся к быстроходным машинам с n ≥ 3000 об/мин). При волновых обмотках, которые применяют в машинах с током до 400 А и в тихоходных машинах с большим числом полюсов, реактивная э.д. с. не должна превышать 5 В. В машинах средней мощности с диаметром якоря до 30 см, в которых обычно применяют волновые обмотки с несколькими витками в секциях, значение ер.ср должно быть не более 2,5 – 3 В.
Другой критерий основан на определении величины электромагнитной энергии или мощности, выделяющейся под краем щетки при искрении в процессе коммутации. Электромагнитная энергия, выделяющаяся в возникающей дуге при разрыве остаточного тока iост = 2iпΔ = 2uпIaΔ,
![]() , (2.46)
, (2.46)
где
 –
–
степень некомпенсации реактивной э.д.с.
Соответствующая мощность, выделяющаяся под краем щетки при искрении и постоянно действующем расстройстве коммутации,
Pa = mWv,(2.62)
где m – число разрывов остаточного тока в секунду.
Так как искрение возникает при коммутации тока в каждой последней секции паза, то каждый разрыв остаточного тока соответствует перемещению коллектора на uп коллекторных делений. Следовательно,
![]()
![]() .
.
При этом мощность
 . (2.62а)
. (2.62а)
Величина![]() представляет собой реактивную э.д.с. ер, вычисленную в предположении, что щетка перекрывает одну коллекторную пластину, (по формуле 2.32а), поэтому
представляет собой реактивную э.д.с. ер, вычисленную в предположении, что щетка перекрывает одну коллекторную пластину, (по формуле 2.32а), поэтому
![]() , (2.62б)
, (2.62б)
где iп = uпia – полный ток во всех секциях, лежащих в каждом слое паза.
Таким образом, при заданных технологии и условиях эксплуатации мощность, выделяющаяся под щеткой при искрении, зависит от полного тока паза 2iп и величины реактивной э. д. с, вычисленной в предположении, что bщ=tк.
Для более полной оценки напряженности коммутации по величине мощности, выделяющейся под щеткой при искрении, необходимо учитывать коммутационные свойства самих щеток. При расстройстве коммутации и применении электрографитированных, графитовых и угольно-графитных щеток искрение возникает равномерно по всей длине коллекторных пластин (при искрении коллекторные пластины обычно имеют по всей длине равномерный подгар с одного края), в результате чего происходит равномерная эрозия щеток и коллекторных пластин. Износ щетки будет зависеть от удельной мощности, выделяющейся на единице длины края щетки:
 . (2.63)
. (2.63)
При этом kщ = iпeр.п/lщ является мерой оценки коммутационной напряженности машины. Обычно коммутация машины не вызывает затруднений, если kщ < 500 Вт/см. В общем случае величина kщ должна уточняться для каждого типа машины, исходя из особенностей ее технологии изготовления и условий эксплуатации. При этом должно учитываться демпфирующее действие вихревых токов в проводниках якоря, особенно заметное в машинах большой мощности.
Проведенные исследования показали, что если удельная мощность ри.уд, выделяющаяся под краем щетки, менее 1 Вт/см, то современные электрографитированные щетки уменьшают остаточный ток настолько, что искрения совершенно не наблюдается, т.е. для безыскровой коммутации необходимо, чтобы
![]() Вт/см. (2.64)
Вт/см. (2.64)
Из (2.64) можно определить ориентировочную величину допустимой степени некомпенсации ![]()
Или
![]() . (2.65)
. (2.65)
Режимы, при которых Δпр% ≤ 1 ÷ 2%, неизбежно сопровождаются искрением под щетками. Интенсивность износа коллекторных пластин должна оцениваться величиной kк = (km/z) 2 р, так как искрение, повреждающее данную пластину, возникает при выходе пластины из-под каждого щеткодержателя, число которых обычно равно числу полюсов 2 р, а число искрящих пластин равно числу пазов z. Рекомендуется, чтобы предельно допустимая величина kк не превосходила 20 – 30 Вт/см (при этом не будет чрезмерного износа коллектора).
Экспериментальная проверка коммутации и настройка добавочных полюсов. Обычно машины постоянного тока при выпуске с завода проходят контрольные испытания, в которые входит и проверка качества коммутации (обычно визуальная). Головные образцы машин проходят более основательную проверку коммутации, в процессе которой путем изменения величины воздушных зазоров в магнитной цепи добавочных полюсов устанавливают оптимальную величину коммутирующей э.д.с.
Основным методом проверки и наладки коммутации является экспериментальное определение зоны безыскровой работы (путем подпитки обмотки добавочных полюсов). Для этой цели в обмотку добавочных полюсов от специального генератора (рис. 2.44) подают дополнительный ток ΔI (ток подпитки), вследствие чего изменяется ее м.д.с. Fдo6. При этом изменяются индукция Вк в зоне коммутации и величина коммутирующей э.д.с. ек.ср. При проведении опыта, постепенно увеличивая м. д. с. добавочных полюсов, добиваются появления искрения под щетками и фиксируют ток подпитки +ΔI Затем изменяют направление тока подпитки и повторяют опыт, добиваясь снова появления искрения под щетками при токе – ΔI. Этот опыт проводят при постоянной частоте вращения n и различных значениях тока якоря. По полученным данным строят зону безыскровой работы машины (см. заштрихованную зону на рис. 2.45). Обычно при построении зоны безыскровой работы величину тока подпитки выражают в процентах от номинального тока якоря. Ширина зоны безыскровой работы характеризует устойчивость коммутации машины при случайных отклонениях условий коммутации от оптимальных, что всегда имеет место в эксплуатации. При номинальном режиме предельная допустимая неточность компенсации реактивной э.д.с. примерно равна половине ширины зоны безыскровой работы: Δпред% ≈ 0,5bв.ном%.
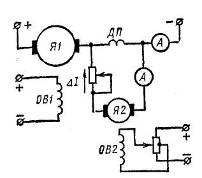
Рис. 2.44 – Схема экспериментальной установки для определения зоны безыскровой работы:
Я1 – якорь исследуемой машины: ОВ1 – ее обмотка возбуждения;
ДП – ее обмотка добавочных полюсов; Я2 – якорь вспомогательного генератора;
ОВ2 – его обмотка возбуждения
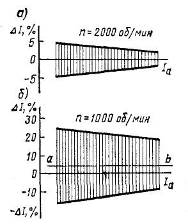
Рис. 2.45. Зоны безыскровой работы машины постоянного тока
Обычно добавочные полюсы настраивают так, чтобы середина зоны безыскровой работы соответствовала току подпитки, равному нулю. Этому режиму отвечает слегка ускоренная коммутация. Исключение составляют машины, работающие в широком диапазоне изменения частоты вращения. В этом случае также нужно настраивать добавочные полюсы по средней линии зоны безыскровой работы, но зону снимать при частоте вращения машины, близкой к максимальной (рис. 2.45, а). При такой настройке добавочных полюсов в области малых частот вращения машина будет недокоммутирована, т.е. поле в зоне коммутации будет слишком слабым (средняя линия ab зоны безыскровой работы на рис. 2.45, б лежит в области положительных значений тока подпитки ΔI).
Это объясняется тем, что при снижении частоты вращения уменьшается абсолютное значение реактивной э.д.с. и увеличивается роль падения напряжения в переходном контакте между щеткой и коллектором, которое не зависит от частоты вращения. В результате резко расширяется область допустимой перекоммутации, т.е. можно было бы увеличить м. д. с. добавочных полюсов. Несоответствие м. д. с. добавочных полюсов оптимальному расположению зон безыскровой работы при малых частотах вращения не имеет практического значения, так как в рассматриваемых режимах машина менее нагружена в коммутационном отношении и имеет более устойчивую коммутацию, чем при большой частоте вращения[4].
2.8 Генераторы постоянного токаСвойства генераторов постоянного тока определяются в основном способом питания обмотки возбуждения. В зависимости от этого различают генераторы:
1) с независимым возбуждением–обмотка возбуждения получает питание от постороннего источника постоянного тока;
2) с параллельным возбуждением–обмотка возбуждения подключена к обмотке якоря параллельно нагрузке;
3) с последовательным возбуждением–обмотка возбуждения включена последовательно с обмоткой якоря и нагрузкой;
4) со смешанным возбуждением–имеются две обмотки возбуждения: одна подключена параллельно нагрузке, а другая – последовательно с нею.
Рассматриваемые генераторы имеют одинаковое устройство и отличаются лишь выполнением обмотки возбуждения. Обмотки независимого и параллельного возбуждения, имеющие большое число витков, изготовляют из провода малого сечения, а обмотку последовательного возбуждения, имеющую небольшое число витков, – из провода большого сечения. Генераторы малой мощности иногда выполняют с постоянными магнитами. Свойства таких генераторов близки к свойствам генераторов с независимым возбуждением.
Генератор с независимым возбуждением. В этом генераторе (рис. 2.46) ток возбуждения Iв не зависит от тока якоря Iа, который равен току нагрузки Iн. Величина тока Iв определяется только положением регулировочного реостата rр.в, включенного в цепь обмотки возбуждения:
![]() , (2.66)
, (2.66)
где Uв – напряжение источника питания; rв – сопротивление обмотки возбуждения; rр.в-сопротивление регулировочного реостата.
Обычно ток возбуждения невелик и составляет 1–3% от номинального тока якоря.
Основными характеристиками, определяющими свойства генераторов постоянного тока, являются характеристики холостого хода, внешняя, регулировочная и нагрузочная.
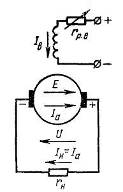
Рис. 2.46. Принципиальная схема генератора с независимым возбуждением
Характеристикой холостого хода (рис. 2.47, а) называют зависимость U0 = f(Iв) при Iн= 0 и n = const. При холостом ходе машины, когда цепь нагрузки разомкнута, напряжение U0 на зажимах якоря равно э.д.с. Е = сеФn.
Обычно частота вращения якоря n поддерживается неизменной и напряжение при холостом ходе зависит только от величины магнитного потока Ф, т.е. оттока возбуждения Iв. Поэтому характеристика U0 = f(Iв) подобна магнитной характеристике Ф = f(Iв)
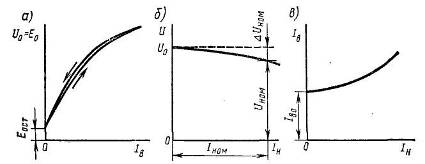
Рис. 2.47 – Характеристики генератора с независимым возбуждением
Характеристику холостого хода легко снять экспериментально. Вначале устанавливают ток возбуждения таким, чтобы U0 ≈ 1,25Uном; затем уменьшают ток возбуждения до нуля и снова увеличивают до прежнего значения. При этом получаются восходящая и нисходящая ветви характеристики, выходящие из одной точки. Расхождение этих ветвей объясняется наличием гистерезиса в магнитопроводе машины. При Iв = 0 в обмотке якоря потоком остаточного магнетизма индуктируется остаточная э.д.с. Еост, которая составляет 2–4% от Uном.
Внешней характеристикой (рис. 2.47, б) называют зависимость U==f(Iн) при n = const и Iв = const. В режиме нагрузки напряжение генератора
![]() , (2.67)
, (2.67)
где ∑r – сумма сопротивлений всех обмоток, включенных последовательно в цепь якоря (якоря, добавочных полюсов и компенсационной).
С увеличением нагрузки напряжение U уменьшается по двум причинам:
а) из-за падения напряжения во внутреннем сопротивлении ∑r машины;
б) из-за уменьшения э.д.с. Е в результате размагничивающего действия реакции якоря.
Изменение напряжения при переходе от режима номинальной нагрузки к режиму холостого хода
![]() . . (2.68)
. . (2.68)
Для генераторов с независимым возбуждением оно составляет 5–15%.
Регулировочной характеристикой (рис. 2.47, в) называют зависимость Iв = f(Iн) при U = const и n = const. Она показывает, каким образом следует регулировать ток возбуждения, чтобы поддержать постоянным напряжение генератора при изменении нагрузки. Очевидно, что в этом случае по мере роста нагрузки нужно увеличивать ток возбуждения.
Нагрузочной характеристикой (рис. 2.48, а) называют зависимость U=f(Iв) при n = const и Iн = const. Нагрузочная характеристика при Iн = Iном (кривая 2) проходит ниже характеристики холостого хода (кривая 1), которую можно рассматривать как частный случай нагрузочной характеристики при Iн = 0. Разность ординат кривых 1 и 2 обусловлена размагничивающим действием реакции якоря и падением напряжения во внутреннем сопротивлении ∑r машины. Наглядное представление о влиянии этих факторов дает характеристический, или реактивный, треугольник ABC (рис. 2.48, а). Если к отрезку аА, равному в определенном масштабе напряжению U при некотором токе нагрузки Iн, и некотором токе возбуждения Iв, прибавить отрезок АВ, равный в том же масштабе падению напряжения Ia∑r в генераторе, то получим отрезок аВ, равный э.д.с. Е. При холостом ходе такая э.д.с. индуктируется в обмотке якоря при меньшем токе I'в, соответствующем абсциссе точки С. Следовательно, отрезок ВС характеризует размагничивающее действие реакции якоря в масштабе тока возбуждения. При неизменном токе Iн катет АВ характеристического треугольника является постоянным; катет ВС зависит не только от тока Iн, но и от степени насыщения магнитной системы, т.е. от тока возбуждения Iв. Однако в ряде случаев влиянием тока возбуждения пренебрегают и принимают, что отрезок ВС пропорционален только току Iн.
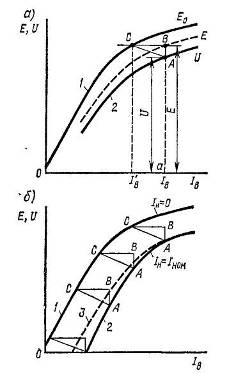
Рис. 2.48 – Нагрузочная характеристика генератора с независимым возбуждением (а) и ее построение с помощью реактивного треугольника (б)
Это позволяет строить нагрузочные характеристики при разных токах, изменяя лишь величину всех сторон треугольника ABC. Если вершину С характеристического треугольника, построенного для некоторого тока Iн, совместить с характеристикой 1 холостого хода (рис. 2.48, б), а затем перемещать треугольник по этой характеристике так, чтобы катет ВС оставался параллельным оси абсцисс, то след вершины А даст приближенно искомую нагрузочную характеристику 2 при заданной величине тока Iн. Эта характеристика будет несколько отличаться от реальной характеристики 3 (которая может быть снята опытным путем), так как величина катета ВС характеристического треугольника будет изменяться вследствие изменения условий насыщения. Используя характеристику холостого хода, с помощью характеристического треугольника могут быть построены и другие характеристики генератора: внешняя и регулировочная.
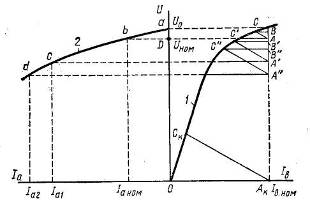
Рис. 2.49 – Построение внешней характеристики генератора с независимым возбуждением с помощью характеристического треугольника
Построение внешней характеристики. При построении исходят из характеристики холостого хода 1 (рис. 2.49). Взяв точку D на оси ординат, соответствующую номинальному напряжению Uном, проводят через нее прямую AD, параллельную оси абсцисс. На этой прямой располагают вершину А характеристического треугольника, снятого при номинальном токе якоря так, чтобы катет АВ был параллелен оси ординат, а вершина С находилась на характеристике 1. Затем, опустив перпендикуляр из вершины А на ось абсцисс, находят точку Ак, соответствующую номинальному току возбуждения Iв.ном.
При этом способе определения тока Iв.ном исходят из того, что под действием реакции якоря э.д.с. при нагрузке будет меньше, чем при холостом ходе, т.е. будет создаваться как бы меньшим током возбуждения. Это уменьшение тока Iв соответствует отрезку ВС, характеризующему размагничивающее действие реакции якоря. Напряжение при номинальном токе также будет меньше э.д.с. на величину падения напряжения Iа∑r, которому соответствует катет АВ.
При построении искомой зависимости 2 напряжения U от тока нагрузки I = Iа ее точки могут быть легко определены: номинальному току Iа.ном отвечает номинальное напряжение Uном (точка b), а режиму холостого хода (ток якоря равен нулю) – напряжение U0 (точка а), равное э.д.с. при токе возбуждения Iв.ном. Другие точки (с, d и т.д.) внешней характеристики можно построить, изменяя все стороны характеристического треугольника прямо пропорционально изменению тока якоря и располагая его так, чтобы катеты А'В', А «В» и т.д. оставались параллельными оси ординат. При этом точки В, В', В» и т.д. должны располагаться на вертикальной линии АкВ, соответствующей току возбуждения Iв.ном, а точки С, С', С» и т.д. на характеристике холостого хода. Тогда ординаты точек В', В» и т.д. будут определять величину напряжения при токах нагрузки Iа1= IаномА'В'/AB; Iа2=IаномА "В»/АВ и т.д.
Обычно при построении внешней характеристики 2 проводят только гипотенузы характеристических треугольников А'С', А «С» и т.д., параллельные АС, до пересечения с характеристикой холостого хода и с линией АкВ, соответствующей току Iв.ном. Ординаты найденных точек А', А» и т.д. дадут искомые величины напряжений (т.е. точки с, d и т.д. внешней характеристики 2), при токах нагрузки
![]() :
:![]() :
:![]() :···=АС:А'С':А «С»: ··.
:···=АС:А'С':А «С»: ··.
Если из точки Ак, соответствующей Iв.иом, провести прямую, параллельную АС, до пересечения с характеристикой холостого хода в точке Ск, то получим величину тока короткого замыкания Iк = IномАкСк/АС, которая в 5–15 раз превосходит номинальный ток. Зная ток короткого замыкания, можно рассчитать максимальный момент и механическую прочность вала, выбрать аппаратуру защиты и т.д. Экспериментальное определение тока короткого замыкания затруднительно, так как в процессе проведения опыта может возникнуть круговой огонь.
Построенная характеристика является приближенной. Основная погрешность обусловлена тем, что размагничивающее действие реакции якоря (т.е. катет ВС) не пропорционально току якоря. Обычно приведенное построение дает несколько заниженное значение напряжения, а также тока короткого замыкания.
Построение регулировочной характеристики (рис. 2.50). Это построение начинают с того, что находят ток возбуждения, соответствующий номинальному напряжению при холостом ходе. Чтобы определить ток возбуждения при номинальном токе нагрузки, вершину А характеристического треугольника (соответствующего номинальной нагрузке) располагают на прямой 2, параллельной оси абсцисс и находящейся от нее на расстоянии Uном. Катет АВ должен быть параллелен оси ординат, а вершина С должна располагаться на характеристике холостого хода 1. Абсцисса вершины А дает искомую величину тока возбуждения. Доказательство справедливости этого построения дано при построении внешней характеристики.
Проводя прямые, параллельные гипотенузе АС, получим отрезки А'С', А «С», А' «С'» и т.д., заключенные между характеристикой холостого хода 1 и прямой 2, соответствующей условию U = Uном = const. Эти отрезки представляют собой гипотенузы характеристических треугольников при других токах нагрузки. Искомая регулировочная характеристика Iв = f(Iа) – кривая 3 – построена в нижнем координатном углу. Значения тока возбуждения определяются абсциссами точек А, А', А» и т.д., которым соответствуют токи нагрузки, пропорциональные длинам отрезков АС, А'С', А «С» и т.д.
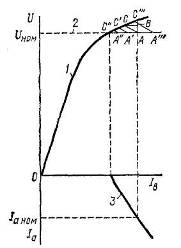
Рис. 2.50 – Построение регулировочной характеристики с помощью характеристического треугольника
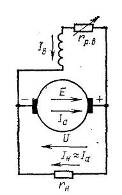
Рис. 2.51 – Принципиальная схема генератора с параллельным возбуждением
Достоинствами генераторов с независимым возбуждением являются возможность регулирования напряжения в широких пределах от нуля до Uмакс путем изменения тока возбуждения и сравнительно малое изменение напряжения генератора под нагрузкой. Однако такие генераторы требуют наличия внешнего источника постоянного тока для – питания обмотки возбуждения.
Генератор с параллельным возбуждением. В этом генераторе (рис. 2.51) обмотка возбуждения присоединена через регулировочный реостат параллельно нагрузке. Следовательно, в машине используется принцип самовозбуждения, при котором обмотка возбуждения получает питание непосредственно от самого генератора. Самовозбуждение генератора возможно только при выполнении определенных условий. Чтобы установить их, рассмотрим процесс изменения тока в контуре «обмотка возбуждения – якорь» при режиме холостого хода. Для рассматриваемого контура можно написать уравнение
e = iBRB + LBdiB/dt, (2.69)
где е и iв–мгновенные значения э.д.с. Е в обмотке якоря и тока возбуждения Iв; Rв = rв + rр.в–суммарное сопротивление цепи возбуждения генератора (сопротивлением ∑r можно пренебречь, так как оно значительно меньше Rв); Lв–суммарная индуктивность обмоток возбуждения и якоря.
Все члены, входящие в (2.69), могут быть изображены графически. На рис. 2.52 показаны зависимость e = f(iв), представляющая собой характеристику холостого хода генератора ОА, и вольт-амперная характеристика сопротивления его цепи возбуждения iвRв = = f(iв). Последняя представляет собой прямую ОВ, проходящую через начало координат под углом у к оси абсцисс; при этом tgγ=Rв. Из (2.69) имеем
diB/dt=(e-iBRB)/LB. (2.70)
Следовательно, если имеется положительная разность (е–iвrв), то производная diв/dt > 0 и происходит процесс увеличения тока возбуждения iв. Установившийся режим в цепи обмотки возбуждения будет иметь место при diв/dt = 0, т.е. в точке С пересечения характеристики холостого хода 0А с прямой 0В. В этом режиме машина будет работать с некоторым установившимся током возбуждения Iв0 и э.д.с. Е0= U0.
Из уравнения (2.70) следует, что для самовозбуждения генератора необходимо выполнение определенных условий.
1. Процесс самовозбуждения в генераторе может начаться только в том случае, если в начальный момент (iв = 0) в обмотке якоря индуктируется некоторая начальная э.д.с. енач. Такая э.д.с. может быть создана потоком остаточного магнетизма. Поэтому для начала процесса самовозбуждения генератора необходимо, чтобы в машине имелся поток остаточного магнетизма, который при вращении якоря индуктирует в его обмотке э.д.с. Еост. Обычно поток остаточного магнетизма имеется в машине из-за наличия гистерезиса в ее магнитной системе. Если такой поток отсутствует, то его создают, пропуская через обмотку возбуждения ток от постороннего источника.
2. При прохождении тока iв по обмотке возбуждения ее м. д. с. Fв должна быть направлена согласно с м. д. с. остаточного магнетизма Fост. В этом случае под действием разности е–iвRв происходит процесс нарастания тока iв, магнитного потока возбуждения Фв и э.д.с. е. Если указанные м. д. с. направлены встречно, то м. д. с. обмотки возбуждения создает поток, направленный против потока остаточного магнетизма, машина размагничивается, и процесс самовозбуждения не сможет начаться.
3. Положительная разность е–iвRв, необходимая для возрастания тока возбуждения iв от нуля до установившегося значения Iв0, может иметь место только в том случае, если в указанном диапазоне изменения тока iв прямая ОВ располагается ниже характеристики холостого хода ОА.
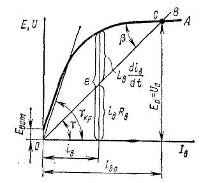
Рис. 2.52 – Характер изменения э.д.с. и тока возбуждения генератора в процессе самовозбуждения
При увеличении сопротивления цепи возбуждения Rв возрастает угол наклона у прямой ОВ к оси тока Iв и при некотором критическом значении этого угла γкр (соответствующем критическому значению сопротивления Rв.кр) прямая ОВ практически совпадет с прямолинейной частью характеристики холостого хода. В этом случае е ≈ iвRв и процесс самовозбуждения становится невозможным. Следовательно, для самовозбуждения генератора необходимо, чтобы сопротивление цепи возбуждения было меньше критического значения.
Если параметры цепи возбуждения подобраны так, что Rв<.Rв.кр, то в точке С обеспечивается устойчивость режима самовозбуждения. При случайном уменьшении тока iв ниже установившегося значения Iв0 или увеличении его свыше Iв0 возникает соответственно положительная или отрицательная разность (е–iвRв), стремящаяся изменить ток iв так, чтобы он снова стал равным Iв0. Однако при Rв> Rв.кр устойчивость режима самовозбуждения нарушается. Если в процессе работы генератора увеличить сопротивление цепи возбуждения Rв до величины, большей Rв.кр, то машина размагничивается и ее э. д. с. уменьшается до Еост. Если же генератор начал работать при Rв > Rв.кр, то он не сможет самовозбудиться. Следовательно, условие Rв < Rв.кр ограничивает возможный диапазон регулирования тока возбуждения генератора, а следовательно, и его напряжения. Обычно уменьшать напряжение генератора путем увеличения сопротивления Rв можно лишь до (0,6 ÷ 0,7) Uном.
Внешняя характеристика генератора представляет собой зависимость U = f(Iв) при n = const и Rв = const (рис. 2.53, кривая 1). Она располагается ниже внешней характеристики генератора с независимым возбуждением (кривая 2). Объясняется это тем, что в рассматриваемом генераторе кроме двух причин, вызщающих уменьшение напряжения с ростом нагрузки (падения напряжения в якоре и размагничивающего действия реакции якоря), существует еще третья причина – уменьшение тока возбуждения Iв = U/Rв, который зависит от напряжения U, т.е. от тока Iн.
Рис. 2.53. Внешняя характеристика генераторов с независимым и параллельным возбуждением
Особенно наглядно видно действие причин, уменьшающих напряжение генератора при увеличении тока нагрузки, из рассмотрения рис. 2.54, на котором показано построение внешней характеристики по характеристике холостого хода и характеристическому треугольнику.
Построение производится в следующем порядке. Через точку D на оси ординат, соответствующую номинальному напряжению, проводят прямую, параллельную оси абсцисс.
На этой прямой располагают вершину А характеристического треугольника; катет АВ должен быть параллелен оси ординат, а вершина С должна лежать на характеристике холостого хода 1. Через начало координат и вершину А проводят прямую 2 до пересечения с характеристикой холостого хода; эта прямая является вольт-амперной характеристикой сопротивления цепи обмотки возбуждения. Ордината точки пересечения Е характеристик 1 и 2 даст напряжение генератора U0 при холостом ходе.
Рис. 2.54 – Построение внешней характеристики генератора с параллельным возбуждением с помощью характеристического треугольника
Произведенное построение справедливо, так как:
а) ток возбуждения при номинальном режиме Iв.ном = Uном/ Rв соответствует абсциссе точки А;
б) э. д. с. генератора при номинальной нагрузке Еном = Uном + Iаном∑r соответствует ординате точки В;
в) э. д. с. Еном можно определить по характеристике холостого хода, если взять ток возбуждения, который меньше Iв.ном на величину отрезка ВС, учитывающего размагничивающее действие реакции якоря.
При построении внешней характеристики 3, ее точки а и b, соответствующие холостому ходу и номинальной нагрузке, определяются величинами напряжений U0 и Uном. Промежуточные точки получают, проводя прямые А'С', А «С» и т.д., параллельные гипотенузе АС, до пересечения с вольт-амперной характеристикой 2 в точках А', А» и т.д., а также с характеристикой холостого хода 1 в точках С', С» и т.д. Ординаты точек А', А» и т.д. будут соответствовать напряжениям при токах нагрузки Iа1, Iа2 и т.д., величины которых определяются из соотношения Iаном: Iа1: Iа2:… = АС: А'С': А «С»:…
Изменение напряжения генератора при переходе от режима номинальной нагрузки к режиму холостого хода составляет 10–20%, т.е. больше, чем в генераторе с независимым возбуждением.
При коротком замыкании якоря ток Iк генератора с параллельным возбуждением сравнительно мал, так как в этом режиме напряжение и ток возбуждения равны нулю. Следовательно, ток короткого замыкания создается только э. д. с. от остаточного магнетизма и составляет (0,4 – 0,8) Iном. Генератор может быть нагружен только до некоторого максимального тока Iкр. При дальнейшем снижении сопротивления нагрузки rн ток Iн ≈ Iа≈ U/rн начинает уменьшаться, так как U падает быстрее, чем уменьшается rн. Работа на участке ab внешней характеристики (см. рис. 10–53) неустойчива; в этом случае машина переходит в режим работы, соответствующий точке b, т.е. в режим короткого замыкания.
Регулировочная и нагрузочная характеристики генератора с параллельным возбуждением имеют такой же характер, как для генератора с независимым возбуждением.
Генератор с последовательным возбуждением. В генераторе с последовательным возбуждением (рис. 2.55, а) ток возбуждения Iв = Iа = Iн. Внешняя характеристика генератора (рис. 2.55, б, кривая 1) может быть построена по характеристике холостого хода (кривая 2) и реактивному треугольнику ABC, стороны которого увеличиваются пропорционально току Iн.
Рис. 2.55 – Схема генератора с последовательным возбуждением и его внешняя характеристика
При токах, меньших Iкр, с увеличением тока нагрузки возрастает магнитный поток Ф и э. д. с. генератора Е, вследствие чего увеличивается и его напряжение U. Только при очень больших токах Iн > Iкр напряжение U с ростом нагрузки уменьшается, так как в этом случае магнитная система машины насыщается и небольшое возрастание потока Ф не может скомпенсировать увеличенное падение напряжения на внутреннем сопротивлении ∑r. Поскольку в генераторе с последовательным возбуждением напряжение сильно изменяется при изменении нагрузки, а при холостом ходе оно близко к нулю, такие генераторы непригодны для питания большинства электрических потребителей. Используют их лишь при электрическом торможении двигателей с последовательным возбуждением, которые при этом переводятся в генераторный режим.
Рис. 2.56 – Схема генератора со смешанным возбуждением и его внешние характеристики
Генератор со смешанным возбуждением. В этом генераторе (рис. 2.56, а) имеются две обмотки возбуждения: основная (параллельная) и вспомогательная (последовательная). Согласное включение двух обмоток позволяет получать приблизительно постоянное напряжение генератора при изменении нагрузки. Внешняя характеристика генератора (рис. 2.56, б) в первом приближении может быть представлена в виде суммы характеристик, создаваемых каждой из обмоток возбуждения. При включении только одной параллельной обмотки, по которой проходит ток возбуждения Iв1, напряжение генератора U постепенно уменьшается с ростом тока нагрузки Iн (кривая 1). При включении одной последовательной обмотки, по которой проходит ток возбуждения Iв2 = Iн, напряжение возрастает с увеличением тока Iн (кривая 2).
Подбирая число витков последовательной обмотки так, чтобы при номинальной нагрузке создаваемое ею напряжение ΔUпосл компенсировало суммарное падение напряжения ΔU при работе машины с одной только параллельной обмоткой, можно добиться, чтобы напряжение U при изменении тока нагрузки от нуля до Iном оставалось почти неизменным (кривая 3). Практически оно изменяется в пределах 2–3%. Увеличивая число витков последовательной обмотки, можно получить характеристику, при которой напряжение Uном > U0 (кривая 4); такая характеристика обеспечивает компенсацию падения напряжения не только во внутреннем сопротивлении ∑r генератора, но и в линии, соединяющей его с нагрузкой. Если последовательную обмотку включить так, чтобы ее м. д. с. была направлена против м. д. с. параллельной обмотки (встречное включение), то внешняя характеристика генератора при большем числе витков последовательной обмотки будет крутопадающей (кривая 5). Встречное включение последовательной и параллельной обмоток возбуждения применяют в сварочных генераторах и других специальных машинах, где требуется ограничить ток короткого замыкания.
Генераторы постоянного тока, выпускаемые отечественной промышленностью, имеют большей частью параллельное возбуждение. Обычно для улучшения внешней характеристики их снабжают небольшой последовательной обмоткой (один-три витка на полюс).
При необходимости такие генераторы можно включать и по схеме с независимым возбуждением. Генераторы с независимым возбуждением используют только при большой мощности, а также при малой мощности, но низком напряжении. В этих машинах независимо от величины напряжения на якоре обмотку возбуждения рассчитывают на стандартное напряжение постоянного тока 110 или 220 В с целью упрощения регулирующей аппаратуры.
2.9 Параллельная работа генераторов постоянного токаРассмотрим параллельную работу генератора, имеющего параллельное или независимое возбуждение, с сетью бесконечно большой мощности, т.е. при условии, что напряжение сети U = const.
Подключение генератора к сети (рис. 2.57, а). Чтобы включить генератор на параллельную работу с сетью, необходимо привести якорь генератора во вращение с номинальной частотой, проверить соответствие полярности щеток генератора и проводов сети и установить такой ток возбуждения, при котором напряжение генератора Uг0 = E0 равно напряжению сети U. При обеспечении этих условий включение генератора не будет сопровождаться броском тока, так как IH = (Uг0 – U)/∑r = 0. Условие Uг0 – U проверяют с помощью нулевого вольтметра V.
Нагрузка генератора. Чтобы нагрузить генератор, подключенный к сети, необходимо повысить его э. д. с. Это можно сделать путем увеличения частоты вращения якоря или тока возбуждения. Удобнее однако, воздействовать на ток возбуждения.
Рис. 2.57 – Схема подключения генератора с параллельным возбуждением к сети и определение его тока нагрузки по внешним характеристикам
Величину тока нагрузки Iн да Iа при заданном токе возбуждения можно определить графически по внешним характеристикам генератора 1 и 2, построенным при различных величинах тока возбуждения (рис. 2.57, б). Например, при некотором токе возбуждения Iв1 (кривая 1) равенство напряжений генератора Uг и сети U имеет место в точке А при токе нагрузки Iн1 = 0. При токе возбуждения Iв2 внешняя характеристика генератора (кривая 2) пересекается с линией U = const в точке В, соответствующей некоторому установившемуся значению Iн2 тока нагрузки.
Работа генератора в этой точке является устойчивой: при случайном изменении тока нагрузки, а следовательно, и тока якоря на величину ΔIн ≈ ΔIа возникает переходный процесс, для которого можно написать уравнение
![]() , (2.71)
, (2.71)
где u = U – мгновенное значение напряжения, сети; iн и е–мгновенные значения тока нагрузки и э. д. с. генератора при переходном процессе; La – индуктивность цепи обмотки якоря; иг – мгновенное значение напряжения генератора.
Из (2.71) следует, что
dijdt = (ur–u)/La. (2.72)
При случайном увеличении тока нагрузки свыше Iн2 напряжение генератора uг становится меньше напряжения сети u, следовательно, производная diв/dt будет отрицательной, т.е. ток нагрузки начнет уменьшаться, стремясь к установившемуся значению Iн2. При случайном уменьшении тока ниже Iн2 напряжение иг > и, производная diн/dt > 0 и ток нагрузки начнет возрастать до установившегося значения Iн2.
Генератор с последовательным возбуждением устойчиво работать параллельно с сетью не может, так как его напряжение Uг увеличивается при возрастании тока нагрузки Iн (рис. 2.58, а). Поэтому при случайном отклонении тока якоря от некоторого установившегося значения Iн, при котором Uг = U (точка А), машина сбрасывает нагрузку или переходит в режим работы, соответствующий очень большому току.
Внешняя характеристика генератора со смешанным возбуждением (рис. 2.58, б) имеет две точки пересечения с прямой U = const. Точка А соответствует неустойчивому режиму работы, а точка В-устойчивому. Однако и генератор со смешанным возбуждением для параллельной работы с сетью применяют редко, так как для него характерны броски тока при переходе из неустойчивого режима в устойчивый.
Рис. 2.58 – Определение тока нагрузки при подключении к сети генераторов с последовательным и смешанным возбуждением
2.10 Электродвигатели постоянного тока
Машина постоянного тока с независимым и параллельным возбуждением, подключенная к сети с постоянным напряжением U, может работать как в генераторном, так и в двигательном режиме и переходить из одного режима работы в другой.
Для контура «обмотка якоря – сеть» можно согласно II закону Кирхгофа написать уравнение
![]() , (2.73а)
, (2.73а)
Откуда
![]() . (2.73б)
. (2.73б)
Если Е > U, то ток Iа совпадает по направлению с э. д. с. Е и машина работает в генераторном режиме (рис. 2.59, а). При этом электромагнитный момент М противоположен направлению вращения n, т.е. является тормозным. Уравнение (2.73а) для генераторного режима может быть записано в виде
U = E-IaΣr (2.74а)
Если же Е <.U, то ток Iа в уравнении (2.73б) меняет свой знак и будет направлен против э. д. с. Е. В соответствии с этим изменит свой знак и электромагнитный момент М, т.е. он будет действовать по направлению вращения n. При этом машина будет работать в двигательном режиме (рис. 2.59, б) и уравнение (2.73а) примет вид
![]() , (2.74б)
, (2.74б)
если за положительное направление тока Iа для двигигильного режима принять его направление, встречное к э.д.с, Е.
Рис. 2.59 – Направление тока I0 и электромагнитного момента М при работе машины постоянного тока в генераторном и двигательном режимах
Таким образом, генераторы с независимым и параллельным возбуждением, подключенные к сети с напряжением U, автоматически переходят в двигательный режим, если их э. д. с. Е становится меньше напряжения сети U. Точно так же рассматриваемые двигатели автоматически переходят в генераторный режим, когда их э. д. с. Е становится больше U.
Рис. 2.60 – Схема двигателя с параллельным возбуждением, зависимости его момента и частоты вращения от тока якоря
При работе машины постоянного тока в двигательном режиме э. д. с. Е и вращающий момент M определяются теми же формулами, что и для генератора
![]() ; (2.75)
; (2.75)
![]() , (2.76)
, (2.76)
но момент имеет противоположное направление. Из (2.74б) и (2.75) можно получить формулу для определения частоты вращения
![]() . (2.77)
. (2.77)
Свойства двигателей постоянного тока, как и генераторов, в основном определяются способом питания обмотки возбуждения. В связи с этим различают двигатели с параллельным, независимым последовательным и смешанным возбуждением. Схемы включения двигателей отличаются от схем включения соответствующих генераторов только наличием пускового реостата, который вводится для ограничения тока при пуске.
Двигатель с параллельным возбуждением. В этом двигателе (рис. 2.60, а) обмотка возбуждения подключена параллельно с обмоткой якоря к сети. В цепь обмотки возбуждения включен регулировочный реостат rр.в, а в цепь якоря–пусковой реостат rп. Характерной особенностью двигателя является то, что ток возбуждения Iв не зависит от тока якоря Ia (тока нагрузки), так как питание обмотки возбуждения по существу независимое. Поэтому, пренебрегая размагничивающим действием реакции якоря, можно приближенно считать, что и поток двигателя не зависит от нагрузки. При этом условии согласно (2.76) и (2.77) получим, чтс зависимости M = f(Ia) и n=f(Ia) (моментная и скоростная характеристики) будут линейными (рис. 2.60, б). Следовательно, линейной будет и механическая характеристика двигателя n = f(M) (см. рис. 2.61, а). Если в цепь якоря включен добавочный резистор или реостат с сопротивлением rп, то
![]() , (2.77а)
, (2.77а)
где n0 = U/(сеФ) – частота вращения при холостом ходе; Δn = (∑r + rп) Iа/(сеФ) – уменьшение частоты, обусловленное суммарным падением напряжения во всех сопротивлениях, включенных в цепь якоря двигателя.
Величина Δn, т.е. сумма сопротивлений ∑r + rп, определяет наклон скоростной n = f(Ia) и механической М = f(Iа) характеристик к оси абсцисс. При отсутствии в цепи якоря добавочного сопротивления rп указанные характеристики будут «жесткими» (естественные характеристики 1 на рис. 2.60, б и 2.61, а), так как падение напряжения Iа∑r в обмотках машины, включенных в цепь якоря, при номинальной нагрузке составляет лишь 3–5% от Uном. При включении добавочного сопротивления rп угол наклона этих характеристик возрастает, вследствие чего образуется семейство реостатных характеристик 2, 3, 4, соответствующих различным значениям rп2, rп3 и rп4. Чем больше сопротивление rп, тем больший угол наклона имеет реостатная характеристика, т.е. тем она «мягче». Следует отметить, что реакция якоря, уменьшая несколько поток машины Ф при нагрузке, стремится придать естественной механической характеристике отрицательный угол наклона, при котором частота вращения n возрастает с увеличением момента М. Однако двигатель с такой характеристикой в большинстве электроприводов устойчиво работать не может. Поэтому современные мощные двигатели с параллельным возбуждением часто снабжают небольшой последовательной обмоткой возбуждения, которая придает механической характеристике необходимый наклон. М. д. с. этой обмотки при токе Iном составляет 10% от м. д. с. параллельной обмотки.
Рис. 2.61 – Механические и рабочие характеристики двигателя с параллельным возбуждением
Регулировочный реостат rp.в позволяет изменять ток возбуждения двигателя Iв и его магнитный поток Ф. Как следует из (2.77а), при этом будет изменяться и частота вращения n. В цепь обмотки возбуждения выключатели и предохранители не устанавливают, так как при разрыве этой цепи и небольшой нагрузке на валу частота вращения двигателя резко возрастает (двигатель идет в «разнос»). При этом сильно увеличивается ток якоря и возникает круговой огонь.
На рис. 2.61, б изображены рабочие характеристики рассматриваемого двигателя. Они представляют собой зависимости потребляемой мощности P1 тока Ia ≈ Iн, частоты вращения n, момента М и к. п. д. η от отдаваемой мощности Р2 на валу двигателя при U = const и Iв = const. Характеристики n = f(P2) и M = f(Р2), как следует из рассмотренных ранее положений, являются линейными, а зависимости Pl = f(P2), Ia = f(P2) и η = f(P2) имеют характер, общий для всех электрических машин. Иногда рабочие характеристики строят в зависимости от тока якоря Iа.
В случае, если обмотка якоря двигателя и обмотка возбуждения подключены к источникам питания с различными напряжениями, его называют двигателем с независимым возбуждением. Такие двигатели применяют в электрических приводах, у которых питание двигателей осуществляется от генераторов или полупроводниковых преобразователей. Механические и рабочие характеристики двигателя с независимым возбуждением аналогичны характеристикам двигателя с параллельным возбуждением, так как у них ток возбуждения Iв также не зависит от тока якоря Iа.
Рис. 2.62 – Схема двигателя с последовательным возбуждением, зависимости его момента и частоты вращения от тока якоря
Двигатель с последовательным возбуждением. В этом двигателе (рис. 2.62, а) ток возбуждения Iв = Iа, поэтому магнитный поток Ф является некоторой функцией тока якоря Iа. Характер этой функции изменяется в зависимости от нагрузки двигателя. При токе якоря 1а < (0,8 ÷ 0,9) Iном, когда магнитная система машины не насыщена Ф = kфIа, причем коэффициент пропорциональности kФ в значительном диапазоне нагрузок остается практически постоянным. При дальнейшем возрастании тока якоря поток Ф растет медленнее, чем Iа, и при больших нагрузках (Iа > Iном) можно считать, что Ф = const. В соответствии с этим изменяются и зависимости n = f(Ia) и M – f(Ia).
При токе якоря Iа < (0,8 ÷ 0,9) Iном частота вращения
![]() , (2.78)
, (2.78)
где с1 и с2 – постоянные.
Следовательно, скоростная характеристика двигателя n = f (Ia) имеет форму гиперболы (рис. 2.62, б).
При токе якоря Iа > Iном частота вращения
![]() , (2.78а)
, (2.78а)
где с'1 и с'2 – постоянные.
В этом случае скоростная характеристика n = f(Ia) становится линейной.
Аналогично может быть получена зависимость электромагнитного момента от тока якоря–M = f(Ia). При Iа < (0,8 ÷ 0,9) Iиом электромагнитный момент
![]() , (2.79)
, (2.79)
где c3 – постоянная.
Следовательно, моментная характеристика М = f(Iа) имеет форму параболы (рис. 2.62, б).
При Iа > Iном электромагнитный момент
![]() , (2.79а)
, (2.79а)
где с'3–постоянная.
В этом случае зависимость M = f(Ia) становится линейной.
Механические характеристики n = f(M) (см. рис. 2.63, а) могут быть построены на основании зависимостей ni = f(Ia) и M=f(Ia). При токе якоря, меньшем (0,8 ÷ 0,9) Iном, частота вращения изменяется по закону
![]() , (2.80)
, (2.80)
где с»1–постоянная.
При токе якоря, большим Iном, зависимость n = f(M) становится линейной.
Кроме естественной характеристики 1, путем включения добавочных пусковых сопротивлений rп в цепь якоря можно получить семейство реостатных характеристик 2, 3 и 4. Эти характеристики соответствуют различным значениям rп2, rп3 и rп4; причем чем больше гп, тем ниже располагается характеристика.
Из рис. 2.63, а следует, что механические характеристики рассматриваемого двигателя (естественная и реостатные) являются «мягкими» и имеют гиперболический характер.
Рис. 2.63 – Механические и рабочие характеристики двигателя с последовательным возбуждением
При малых нагрузках частота вращения n резко возрастает и может превысить максимально допустимое значение (двигатель идет в «разнос»). Поэтому такие двигатели нельзя применять для привода механизмов, работающих в режиме холостого хода и при небольшой нагрузке (различные станки, транспортеры и пр.). Обычно минимально допустимая нагрузка составляет (0,2 –0,25) Iном; только двигатели очень малой мощности (десятки ватт) используют для работы в устройствах, где возможен холостой ход. Чтобы предотвратить возможность работы двигателя без нагрузки, его соединяют с приводным механизмом жестко (зубчатой передачей или глухой муфтой); применение ременной передачи или фрикционной муфты для включения недопустимо.
Несмотря на указанный недостаток, двигатели с последовательным возбуждением широко применяют в различных электрических приводах, особенно там, где имеют место изменение нагрузочного момента в широких пределах и тяжелые условия пуска (грузоподъемные и поворотные механизмы, тяговый привод и пр.). Объясняется это тем, что мягкая характеристика рассматриваемого двигателя более благоприятна для указанных условий работы, чем жесткая характеристика двигателя с параллельным возбуждением. При жесткой характеристике частота вращения n почти не зависит от момента М, поэтому мощность
![]() , (2.81)
, (2.81)
где с4 – постоянная.
При мягкой характеристике двигателя с последовательным возбуждением частота вращения n обратно пропорциональна ![]() , вследствие чего
, вследствие чего
![]() , (2.81а)
, (2.81а)
где c'4 – постоянная.
Поэтому при изменении нагрузочного момента в широких пределах мощность Р2, а следовательно, мощность Р1 и ток Iа у двигателей с последовательным возбуждением изменяются в меньших пределах, чем у двигателей с параллельным возбуждением. Кроме того, они лучше переносят перегрузки; например, при заданной кратности перегрузки по моменту М/Мном = kM ток якоря в двигателе с параллельным возбуждением увеличивается в kM раз, а в двигателе с последовательным возбуждением–только в ![]() раз. По этой же причине двигатель с последовательным возбуждением развивает больший пусковой момент, так как при заданной кратности пускового тока Iп/Iном = ki пусковой момент его Мп = k2iМном, в то время как у двигателя с параллельным возбуждением Мп = kiМном.
раз. По этой же причине двигатель с последовательным возбуждением развивает больший пусковой момент, так как при заданной кратности пускового тока Iп/Iном = ki пусковой момент его Мп = k2iМном, в то время как у двигателя с параллельным возбуждением Мп = kiМном.
На рис. 2.63, б приведены рабочие характеристики двигателя с последовательным возбуждением. Характеристики n = f(P2) и M = f(Р2), как следует из рассмотренных ранее положений, являются нелинейными; характеристики P1 = f (P2), Iа = f(P2) и η = f(Р2) имеют примерно такую же форму, как и у двигателя с параллельным возбуждением.
Рис. 2.64 – Схема двигателя со смешанным возбуждением и его механические характеристики
Двигатель со смешанным возбуждением. В этом двигателе (рис. 2.64, а) магнитный поток Ф создается в результате совместного действия двух обмоток возбуждения – параллельной и последовательной. Поэтому его механическая характеристика (рис. 2.64, б, кривые 3 и 4) располагается между характеристиками двигателей с параллельным (прямая 1) и последовательным (кривая 2) возбуждением. В зависимости от соотношения м. д. с. параллельной и последовательной обмоток при номинальном режиме можно приблизить характеристику двигателя со смешанным возбуждением к характеристике 1 (при малой м. д. с. последовательной обмотки) или к характеристике 2 (при малой м. д. с. параллельной обмотки). Одним из достоинств двигателя со. смешанным возбуждением является то, что он, обладая мягкой механической характеристикой, может работать при холостом ходе, так как его частота вращения холостого хода n0 имеет конечное значение.
2.11 Пуск в ход электродвигателей постоянного токаДля пуска двигателей постоянного тока могут быть применены три способа:
1) прямой пуск, при котором обмотка якоря подключена непосредственно к сети;
2) реостатный пуск с помощью пускового реостата, включаемого в цепь якоря для ограничения тока при пуске;
3) пуск путем плавного повышения напряжения, подаваемого на обмотку якоря.
Прямой пуск. Обычно в двигателях постоянного тока падение напряжения Iном∑r во внутреннем сопротивлении цепи якоря составляет 5–10% от Uном, поэтому при прямом пуске ток якоря Iп = Uном/∑r = (10 ÷ 20) Iном, что создает опасность поломки вала машины и вызывает сильное искрение под щетками. По этой причине прямой пуск применяют в основном для двигателей малой мощности (до нескольких сотен ватт), в которых сопротивление ∑r относительно велико, и лишь в отдельных случаях–для двигателей с последовательным возбуждением мощностью в несколько киловатт. При прямом пуске таких двигателей Iп = (4 ÷ 6) Iном.
Переходный процесс изменения частоты вращения n и тока якоря ia в процессе пуска определяется нагрузкой двигателя и его электромеханической постоянной времени Тм. Для установления характера изменения n и ia при пуске двигателя с параллельным возбуждением будем исходить из уравнений:
![]() ; (2.82а)
; (2.82а)
![]() , (2.82б)
, (2.82б)
где J – момент инерции вращающихся масс электродвигателя и сочлененного с ним производственного механизма; Мн–тормозной момент, создаваемый нагрузкой.
Из (2.82б) определяем ток якоря
![]() . (2.83)
. (2.83)
Подставляя его значение в (2.82а), получаем
![]() (2.84а)
(2.84а)
![]() , (2.84б)
, (2.84б)
или
U где ![]() – частота вращения при идеальном холостом ходе;
– частота вращения при идеальном холостом ходе;
![]() уменьшение частоты вращения при переходе
уменьшение частоты вращения при переходе
от холостого хода к нагрузке; nн = n0 – Δnн–установившаяся частота вращения при нагрузке двигателя; ![]() – электромеханическая постоянная времени, определяющая скорость протекания переходного процесса.
– электромеханическая постоянная времени, определяющая скорость протекания переходного процесса.
При этом Iн = Мн/(смФ) – установившийся ток якоря после окончания процесса пуска, определяемый нагрузочным моментом Мн.
Решая уравнение (2.84б), получаем
![]() . (2.85а)
. (2.85а)
Постоянную интегрирования А находим из начальных условий: при t = 0; n = 0 и А = – nн. В результате имеем
![]() . (2.85б)
. (2.85б)
Рис. 2.65 – Переходный процесс изменения частоты вращения и тока якоря при прямом пуске двигателя постоянного тока
Зависимость тока якоря от времени при пуске двигателя определяется из (2.83). Подставляя в него значение
![]() , (2.85в)
, (2.85в)
полученное из (2.846) и (2.856), и заменяя nн = n0 – Δn, имеем
![]() . (2.86а)
. (2.86а)
Учитывая значение Δnн, n0, Тм и Мн/смФ, получим
![]() , (2.86б)
, (2.86б)
где Iнач = U/∑r – начальный пусковой ток.
На рис. 2.65 приведены зависимости изменения тока якоря и частоты вращения (в относительных единицах) при прямом пуске двигателя с параллельным возбуждением. Время переходного процесса при пуске принимается равным (3–4) Тм. За это время частота вращения n достигает (0,95 – 0,98) от установившегося значения nн, а ток якоря Iа также приближается к установившемуся значению.
Реостатный пуск. Этот способ получил наибольшее распространение. В начальный момент пуска при n = 0 ток Iп = U/(∑r + rп). Максимальное сопротивление пускового реостата rп подбирается так, чтобы для машин большой и средней мощностей ток якоря при пуске Iп = (1,4 ÷ 1,8) Iном, а для машин малой мощности Iп = (2 ÷ 2,5) Iном. Рассмотрим процесс реостатного пуска на примере двигателя с параллельным возбуждением. В начальный период пуск осуществляется по реостатной характеристике 6 (рис. 2.66, а), соответствующей максимальному значению сопротивления rп пускового реостата; при этом двигатель развивает максимальный пусковой момент Мп.макс.
Рис. 2.66 – Изменение частоты вращения и момента при реостатном пуске двигателей с параллельным и последовательным возбуждением
Регулировочный реостат rр.в в этом случае выводится так, чтобы ток возбуждения Iв и поток Ф были максимальными. По мере разгона момент двигателя уменьшается, так как с увеличением частоты вращения растет э. д. с. Е и уменьшается ток якоря Ia=(U – E)/(∑r +rп). При достижении некоторого значения Мп.мин часть сопротивления пускового реостата выводится, вследствие чего момент снова возрастает до Мп.макс. При этом двигатель переходит на работу по реостатной характеристике 5 и разгоняется до достижения Mп.мин. Таким образом, уменьшая постепенно сопротивление пускового реостата, осуществляют разгон двигателя по отдельным отрезкам реостатных характеристик 6,5,4,3 и 2 (см. жирные линии на рис. 2.66, а) до выхода на естественную характеристику 1. Средний вращающий момент при пуске Мп.ср = 0,5 (Мп.макс +Мп.мин) = const, вследствие чего двигатель разгоняется с некоторым постоянным ускорением. Таким же образом пускается в ход двигатель с последовательным возбуждением (рис. 2.66, б). Количество ступеней пускового реостата зависит от жесткости естественной характеристики и требований, предъявляемых к плавности пуска (допустимой разности Mп.макс – Мп.мин).
Пусковые реостаты рассчитывают на кратковременную работу под током.
На рис. 2.67 показаны зависимости тока якоря ia, электромагнитного момента М, момента нагрузки Мн и частоты вращения n при реостатном пуске двигателя (упрощенные диаграммы).
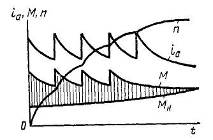
Рис. 2.67 – Переходный процесс изменения частоты вращения, момента и тока якоря при реостатном пуске двигателя постоянного тока
При выводе отдельных ступеней пускового реостата ток якоря iaдостигает некоторого максимального значения, а затем уменьшается согласно уравнению (2.85б) до минимального значения. При этом электромеханическая постоянная времени и начальный ток будут иметь различные для каждой ступени пускового реостата значения:
![]() ;
; ![]()
В соответствии с изменением тока якоря изменяется и электромагнитный момент М. Частота вращения n изменяется согласно уравнению
![]() , (2.86в)
, (2.86в)
где nнач–начальная частота вращения при работе на соответствующей ступени пускового реостата.
Заштрихованная на рис. 2.67 область соответствует значениям динамического момента Мдин = М – Мн, обеспечивающего разгон двигателя до установившейся частоты вращения.
Пуск путем плавного повышения питающего напряжения. При реостатном пуске возникают довольно значительные потери энергии в пусковом реостате. Этот недостаток можно устранить, если пуск двигателя осуществлять путем плавного повышения напряжения, подаваемого на его обмотку. Но для этого необходимо иметь отдельный источник постоянного тока с регулируемым напряжением (генератор или управляемый выпрямитель). Такой источник используют также для регулирования частоты вращения двигателя.
2.12 Принципы регулирования частоты вращения двигателей постоянного токаЧастота вращения двигателя постоянного тока определяется формулой
![]() . (2.87)
. (2.87)
Следовательно, ее можно регулировать тремя методами:
1) включением добавочного резистора или реостата rдоб в цепь обмотки якоря;
2) изменением магнитного потока Ф;
3) изменением питающего напряжения U.
На примере двигателя с параллельным возбуждением рассмотрим принципиальные особенности, свойственные этим методам регулирования.
Включение реостата в цепь якоря. При включении реостата в цепь якоря частота вращения с ростом нагрузки уменьшается более резко, чем при работе двигателя без реостата:
![]() . (2.88)
. (2.88)
Это наглядно показано на рис. 2.68, где приведены характеристики двигателя с параллельным возбуждением: 1 – естественная (при rдо6 = 0); 2-реостатная (при rдоб > 0) Частоты вращения n0 при холостом ходе для обеих характеристик равны, в то время как значения уменьшения частоты вращения Δn при нагрузке различны. При одном и том же токе якоря
![]() .
.
Чем больше добавочное сопротивление rдоб, тем круче е увеличением нагрузки падает частота вращения.
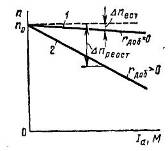
Рис. 2.68 – Скоростные характеристики двигателя с параллельным возбуждением при регулировании частоты вращения путем включения реостата в цепь якоря
Механические характеристики п = f (M) двигателя с параллельным возбуждением могут быть получены из скоростных характеристик n = f(Ia) изменением масштаба по оси абсцисс, так как для двигателя этого типа
![]() ,
,
т.е. момент пропорционален току якоря.
Основным недостатком данного метода регулирования является возникновение больших потерь энергии в реостате, особенно при низких частотах вращения. Последнее видно из соотношения
 , (2.89)
, (2.89)
где ΔР – потери в цепи якоря; Р1 – мощность, подведенная к якорю.
Решая уравнение (2.89) относительно ΔР, получим
![]() , (2.90)
, (2.90)
т.е. потери линейно возрастают с уменьшением частоты вращения якоря.
Очевидно, что данный метод позволяет только уменьшать частоту вращения по сравнению с частотой при естественной характеристике. Иногда существенным является то обстоятельство, что при включении в цепь якоря значительного сопротивления характеристики двигателя становятся крутопадающими («мягкими»), вследствие чего небольшие изменения нагрузочного момента приводят к большим изменениям частоты вращения.
Изменение магнитного потока двигателя. Чтобы изменить магнитный поток, необходимо регулировать ток возбуждения двигателя. При различных магнитных потоках Ф1 и Ф2 частоты вращения будут определяться формулами:
 (2.91)
(2.91)
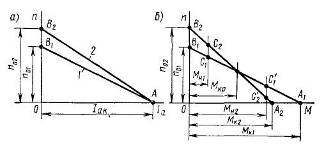
Рис. 2.69 – Скоростная и механическая характеристики двигателя с параллельным возбуждением при регулировании частоты вращения путем изменения магнитного потока
В двигателе с параллельным возбуждением, например, частота вращения при холостом ходе и уменьшение ее при нагрузке изменяются обратно пропорционально изменению магнитного потока:
![]() . (2.92)
. (2.92)
Таким образом, скоростные характеристики двигателя при различных магнитных потоках не являются параллельными (рис. 2.69, а). Эти характеристики пересекаются при частоте вращения, равной нулю, так как в данном случае Е =сеФn = 0 и ток не зависит от величины потока:
![]() ; (2.93)
; (2.93)
он определяется величинами напряжения и сопротивления цепи якоря. Величину тока Iак при n = 0 называют током короткого замыкания.
Механические характеристики для двигателя с параллельным возбуждением строятся на основании следующих соображений. Каждая из механических характеристик является практически линейной (если пренебречь реакцией якоря) и может быть построена по двум точкам: точке холостого хода, в которой момент равен нулю, и точке короткого замыкания, в которой момент максимален.
Сравнивая моменты в режиме короткого замыкания при различных значениях магнитного потока, получим
![]() . (2.94)
. (2.94)
Таким образом, при уменьшении магнитного потока частота вращения холостого хода возрастает, а момент при коротком замыкании снижается. Следовательно, механические характеристики, построенные при различных величинах магнитного потока, пересекаются при частоте вращения, меньшей частоты вращения при холостом ходе, но большей нуля (рис. 2.69, б). Рассматривая механические характеристики, можно сделать вывод, что при величинах нагрузочного момента, существенно меньших Мкр, снижение потока ведет к увеличению частоты вращения.
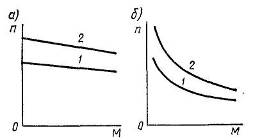
Рис. 2.70 – Механические характеристики двигателей с параллельным и последовательным возбуждением большой и средней мощностей:
1-при нормальном возбуждении, 2 – при уменьшении магнитною потока
Это является характерным для двигателей средней и большой мощностей (рис. 2.70, а), где в рабочем диапазоне изменения токов имеют место небольшие падения напряжения в якоре (для получения высокого к. п. д.).
В микромашинах уменьшение потока, т.е. тока возбуждения, обычно применяют для снижения частоты вращения.
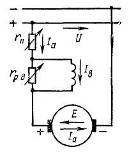
Рис. 2.71 – Включение регулировочного реостата в двигателе с последовательным возбуждением
Аналогично располагаются скоростные и механические характеристики двигателя с последовательным возбуждением; поэтому в двигателях большой и средней мощностей при уменьшении магнитного потока частота вращения возрастает (рис. 2.70, б). Уменьшение магнитного потока в этом двигателе осуществляется обычно путем включения регулировочного реостата rp.в параллельно обмотке возбуждения (рис. 2.71), вследствие чего ток возбуждения
![]() , (2.95)
, (2.95)
где rр.в-сопротивление регулировочного реостата, включенного параллельно обмотке возбуждения; kp.в = Iв/Ia – коэффициент регулирования возбуждения.
Рис. 2.72 – Скоростные и механические характеристики двигателей
с параллельным (независимым) (а) и последовательным (б) возбуждением при регулировании частоты вращения путем изменения напряжения на зажимах якоря
Рассмотренный метод регулирования весьма прост и экономичен, поэтому его широко применяют на практике. Однако регулирование частоты вращения этим методом можно осуществить только в сравнительно небольшом диапазоне; обычно nмакс/nмин = 2 ÷ З. Нижний предел nмин ограничивается насыщением магнитной цепи машины, которое не позволяет увеличивать в значительной степени магнитный поток. Верхний предел nмакс определяется условиями устойчивости (при сильном уменьшении Ф двигатель идет в «разнос»), а также тем, что при глубоком ослаблении возбуждения резко увеличивается искажающее действие реакции якоря и растет реактивная э.д.с, что повышает опасность возникновения искрения на коллекторе и появления кругового огня. По этой причине двигатели, предназначенные для работы в режимах глубокого ослабления возбуждения, должны иметь компенсационную обмотку и пониженную величину реактивной э. д. с. при номинальном режиме.
Изменение напряжения на зажимах якоря. При различных напряжениях на зажимах якоря U1 и U2 частоты вращения будут соответственно определяться формулами:
![]() ;
;
![]() .
.
В двигателе с параллельным возбуждением частота вращения холостого хода изменяется пропорционально изменению напряжения:
![]() , (2.96)
, (2.96)
а падение частоты вращения при одинаковой нагрузке остается неизменным:
![]() . (2.97)
. (2.97)
В связи с этим скоростные характеристики n = f(Ia) двигателя с параллельным возбуждением представляют собой семейство параллельных прямых 1, 2 и 3 (рис. 2.72, а).
Механические характеристики n = f(M) получаются из скоростных простым изменением масштаба по оси абсцисс, так как момент пропорционален току якоря.
Скоростные и механические характеристики двигателя с последовательным возбуждением в основном строятся аналогично (рис. 2.72, б).
Регулирование частоты вращения двигателя путем изменения напряжения на зажимах якоря обычно ведут «вниз», т.е. уменьшают напряжение и частоту вращения по сравнению с номинальными.
2.13 Работа электродвигателей постоянного тока в тормозных режимах
Электрические двигатели, как правило, используют не только для вращения механизмов, но и для их торможения. Торможение необходимо в том случае, если нужно быстро остановить механизм или быстро уменьшить его частоту вращения. Применение механических тормозов для этих целей затруднительно из-за нестабильности их характеристик, малого быстродействия и трудностей автоматизации.
Различают три вида тормозных режимов двигателей постоянного тока:
1) генераторное торможение с отдачей электрической энергии в сеть (рекуперативное торможение);
2) генераторное торможение с гашением выработанной энергии в реостате, подключенном к обмотке якоря (реостатное, или динамическое, торможение);
3) электромагнитное торможение (торможение противоключением).
Во всех указанных режимах электромагнитный момент М воздействует на якорь в направлении, противоположном n, т.е. является тормозным. Рассмотрим более подробно эти режимы.
Рекуперативное торможение. Двигатель с параллельным возбуждением переходит в режим рекуперативного торможения при увеличении его частоты вращения n свыше частоты вращения n0 = U/сеФ. В этом случае э. д. с. машины становится больше напряжения сети и ток меняет свое направление:
![]() , (2.98)
, (2.98)
т.е. двигатель переходит в генераторный режим, создает тормозной момент, а выработанная электрическая энергия отдается в сеть и может быть полезно использована.
Переход машины с параллельным возбуждением из двигательного режима в генераторный может происходить автоматически, если под действием внешнего момента якорь будет вращаться с частотой, большей частоты вращения холостого хода: n > n0. Можно перевести машину в генераторный режим и принудительно, уменьшив частоту вращения n0 за счет увеличения магнитного потока (тока возбуждения) или снижения напряжения, подводимого к двигателю. Механические характеристики в генераторном режиме являются продолжением механических характеристик, имеющих место в двигательном режиме, в область отрицательных моментов (рис. 2.73).
Двигатели с последовательным возбуждением не могут автоматически переходить в режим рекуперативного торможения. В случае необходимости иметь рекуперативное торможение схему двигателей в тормозном режиме изменяют, превращая двигатели в генераторы с независимым возбуждением. Двигатели со смешанным возбуждением могут автоматически переходить в генераторный режим, что обусловило их применение в троллейбусах, трамваях и т.п., где имеются частые остановки, а двигатель должен обладать «мягкой» механической характеристикой.
Рис. 2.73 – Механические характеристики двигателя с параллельным возбуждением в двигательном и генераторном режимах
Рис. 2.74 – Схема включения двигателя с параллельным возбуждением в режиме динамического торможения; механические характеристики двигателей с параллельным и последовательным возбуждением в этом режиме
Динамическое торможение. При динамическом (реостатном) торможении двигателя с параллельным возбуждением обмотку якоря отключают от сети и к ней присоединяют реостат rдоб (рис. 2.74, а). При этом машина работает генератором и создает тормозной момент. Однако выработанная электрическая энергия гасится в реостате. Регулирование тока якоря Iа = Е/(∑r + rдоб) и тормозного момента М при этом способе торможения осуществляется путем изменения сопротивления rдоб, подключенного к обмотке якоря (рис. 2.74, б), или э.д.с. Е (воздействуя на ток возбуждения). При n = 0 тормозной момент равен нулю, следовательно, машина не может быть заторможена в неподвижном состоянии.
Рис. 2.75 – Схема включения двигателя с параллельным возбуждением в режиме электромагнитного торможения (а); механические характеристики двигателей с параллельным (б) и последовательным (в) возбуждением в этом режиме
Двигатель с последовательным возбуждением может работать в режиме динамического торможения, но при переводе его в этот режим нужно переключить провода, подводящие ток к обмотке возбуждения. Последнее необходимо для того, чтобы при изменении направления тока в якоре (при переходе с двигательного режима в генераторный) направление тока в обмотке возбуждения оставалось неизменным и создаваемая этой обмоткой м.д.с. Fвсовпадала по направлению с м. д. с. Fост от остаточного магнетизма. В противном случае генераторы с самовозбуждением размагничиваются. Механические характеристики для этого двигателя в тормозных режимах (рис. 2.74, в) нелинейны. Двигатель со смешанным возбуждением также может работать в режиме динамического торможения.
Электромагнитное торможение. В этом режиме изменяют направление электромагнитного момента М, сохраняя неизменным направление вращения, т.е. момент делают тормозным. Последнее осуществляют так же, как и при изменении направления вращения двигателя, путем переключения проводов, подводящих ток к обмотке якоря (рис. 2.75, а) или к обмотке возбуждения. Чтобы ограничить величину тока в этом режиме, в цепь обмотки якоря вводят добавочное сопротивление rдоб. Регулирование величины юка Ia = (U + Е)/(∑r + rдоб), т.е. тормозного момента М, осуществляют изменением сопротивления rдоб (рис. 10–75, б, в) или э.д.с. Е (тока возбуждения Iв).
С энергетической точки зрения рассматриваемый способ торможения является самым невыгодным, так как машина потребляет как механическую, так и электрическую энергию, которые гасятся в обмотке якоря и во включенном в ее цепь реостате. Но при этом способе можно получать большие тормозные моменты при низких частотах вращения и даже при n –0, поскольку в этом случае ток Iа = U/∑r + rдоб).
2.14 Современные способы регулирования частоты вращения электродвигателей постоянного тока
Описанные принципы регулирования частоты вращения в двигательном и тормозных режимах находят свою практическую реализацию в четырех основных способах регулирования:
1) реостатно-контакторное управление;
2) регулирование по системе «генератор–двигатель»;
3) регулирование по системе «управляемый выпрямитель–двигатель»;
4) импульсное регулирование.
Подробное исследование этих способов регулирования дается в курсах электропривода и теории автоматического регулирования. В этом разделе будут рассмотрены только основные положения, имеющие непосредственное отношение к теории электрических машин.
Реостатно-контакторное управление. В настоящее время это управление применяют весьма широко для регулирования частоты вращения двигателей малой и средней мощности, а иногда (на железнодорожном транспорте) и для регулирования мощных двигателей.
Обычно при реостатно-контакторном управлении используют два метода регулирования: при частотах вращения, меньших номинальной, в цепь якоря включают дополнительные сопротивления; при повышенных частотах вращения регулируют ток возбуждения.
Машины малой мощности при отсутствии автоматизированного управления имеют два ползунковых регулировочных реостата, один из которых включен в цепь якоря, а другой – в цепь возбуждения. При больших мощностях, а также при необходимости автоматизации процесса величину сопротивлений изменяют ступенчато (рис. 10–76) при помощи контакторов. Если требуется точное регулирование, то число контакторов должно быть очень большим, при этом вся установка становится громоздкой, дорогой и сравнительно малонадежной.
Рис. 2.76 – Схема реостатно-контакторного регулирования частоты вращения двигателя с последовательным возбуждением
Реостатно-контакторная система при двигателях с параллельным возбуждением позволяет в зоне высоких частот вращения осуществлять рекуперативное торможение путем увеличения тока возбуждения. В зоне низких частот вращения применяют реостатное торможение, причем регулирование тормозного усилия осуществляют при помощи той же реостатно-контакторной установки, которая регулирует двигательный режим, после соответствующего переключения схемы.
В связи со сложностью автоматизации и большими расходами, идущими на ремонт и эксплуатацию, реостатно-контакторное управление в настоящее время постепенно заменяют более совершенными системами управления.
Система «генератор-двигатель». В этой установке (рис. 2.77) двигатель Д получает питание от автономного генератора Г с независимым возбуждением, который приводят во вращение от какого-либо первичного двигателя ПД (электродвигателя, дизеля и пр.). Регулирование частоты вращения осуществляют изменением:
1) напряжения на якоре двигателя путем изменения тока возбуждения генератора;
2) магнитного потока двигателя путем регулирования тока возбуждения двигателя.
Пуск в ход и получение низких частот вращения производят при максимальном токе возбуждения двигателя, но при уменьшенном токе возбуждения генератора, т.е. при пониженном напряжении. Ослабление магнитного потока двигателя (уменьшение его тока возбуждения) производят только после того, как исчерпана возможность повышения напряжения, т.е. когда установлен максимальный ток возбуждения генератора. Изменение направления вращения двигателя производят путем изменения полярности подводимого к якорю напряжения, для чего изменяют направление тока в обмотке возбуждения генератора.
Система «генератор – двигатель» выгодно отличается тем, что в ней отсутствуют силовые контакторы, реостаты и т.п. Поскольку управление двигателем осуществляют путем регулирования сравнительно небольших токов возбуждения, управление легко поддается автоматизации.
Установки типа «генератор–двигатель» получили широкое распространение в промышленности и на транспорте, в тех устройствах, где требуется регулирование частоты вращения в широких пределах. В транспортных установках генератор приводится во вращение дизелем. В промышленности обычно для привода генератора используют трехфазные синхронные или асинхронные двигатели.
Систему «генератор – двигатель» широко применяют в металлургической промышленности для привода прокатных станов с двигателями мощностью 10 000 кВт и более при диапазоне регулирования частоты вращения 1:200 и точности поддержания заданной частоты вращения (погрешности) менее 1%.
Следует отметить, что в этой системе уменьшение частоты вращения производят с использованием рекуперативного торможения: сначала, увеличивая ток возбуждения двигателя, а затем, постепенно уменьшая ток возбуждения генератора, можно перевести двигатель в генераторный режим и быстро затормозить механизм. При этом накопленная кинетическая энергия якоря и механизма отдается в электрическую сеть.
Рис. 2.77 – Схема регулирования двигателя с независимым возбуждением при питании его от генератора
Если нагрузка толчкообразная, то иногда на валу первичного двигателя, вращающего генератор, ставят маховик, который уменьшает перегрузки первичного двигателя.
Недостатки системы «генератор–двигатель»:
1) большие масса, габариты и стоимость установки;
2) сравнительно низкий к. п. д. (порядка 0,6 – 0,7), так как производится трехкратное преобразование энергии.
В последнее время на транспорте (тепловозы, большие автомобили, корабли и т.п.) вместо генератора постоянного тока в системе «генератор–двигатель» применяют синхронный генератор с полупроводниковым выпрямителем. Это позволяет снизить вес и уменьшить стоимость генератора. В промышленных установках такое усовершенствование не получило широкого распространения, так как из-за выпрямителя теряется возможность рекуперативного торможения.
Система «управляемый выпрямитель–двигатель». Развитие полупроводниковой техники позволило применить для регулирования частоты вращения двигателя управляемый выпрямитель УВП, выполненный на тиристорах, где одновременно с выпрямлением производится регулирование выпрямленного напряжения (рис. 2.78). Применение системы «управляемый выпрямитель – двигатель» позволяет увеличить коэффициент полезного действия и уменьшить массу установки.
Рис. 2.78. Схема регулирования двигателя с независимым возбуждением при питании его от управляемого вентильного преобразователя
Если требуется быстрая остановка механизма, с последующим реверсированием, то для осуществления рекуперативного торможения параллельно с выпрямителем ставят инвертор, т.е. еще один полупроводниковый преобразователь, позволяющий отдавать электрическую энергию от машины постоянного тока в сеть переменного тока.
Недостатком системы «управляемый выпрямитель–двигатель» является низкий коэффициент мощности при пониженном выходном напряжении. Кроме того, несколько ухудшается коммутация двигателя из-за пульсаций тока якоря. Особенно велики пульсации тока при питании от сети однофазного тока (электровозы переменного тока), где обеспечение удовлетворительной коммутации вырастает в большую проблему.
В настоящее время система «управляемый выпрямитель–двигатель» имеет меньшую надежность, чем система «генератор – двигатель», из-за сложности полупроводникового оборудования, особенно системы управления.
Импульсное регулирование частоты вращения. В последние годы в связи с развитием полупроводниковой техники широко применяют импульсный метод регулирования частоты вращения двигателей постоянного тока. При этом на двигатель с помощью импульсного прерывателя периодически подаются импульсы напряжения определенной частоты.
Импульсный прерыватель (рис. 2.79, а) состоит из входного фильтра Lф-Сф, электронного ключа ТK (транзисторного или тиристорного), обратного диода Д и индуктивности L. В период времени τ, когда электронный ключ замкнут (транзистор или тиристор открыт), питающее напряжение U подается полностью на якорь двигателя, и его ток ia увеличивается (рис. 10–79, б); когда электронный ключ разомкнут (транзистор или тиристор заперт), ток iа продолжает протекать через якорь двигателя и обратный диод Д под действием электромагнитной энергии, запасенной в индуктивностях La+ L цепи якоря; при этом ток ia уменьшается. Частота следования импульсов при номинальном режиме обычно составляет 200–400 Гц, вследствие чего период Т примерно на два порядка меньше постоянной времени цепи якоря. Поэтому за время импульса τ ток в двигателе не успевает значительно возрасти, а за время паузы (Т – τ) – уменьшиться.
Рис. 2.79 – Схема импульсного регулирования двигателя постоянного тока (а); графики изменения напряжения и тока при работе двигателя в режиме непрерывного тока (б)
Среднее напряжение, подаваемое на обмотку якоря,
![]() , (2.99)
, (2.99)
где α = τ/Т – коэффициент регулирования напряжения, равный относительной длительности включения ключа ТК.
При этом частота вращения двигателя
![]() , (2.100)
, (2.100)
где Iа= Iср–среднее значение тока якоря.
Изменение тока при работе импульсного прерывателя ΔI = Iмакс – Iмин определяется по приближенной формуле
![]() , (2.101)
, (2.101)
где La+L – индуктивность цепи якоря двигателя.
Если параметры схемы выбраны так, что пульсация тока не превосходит 5–10%, то работа двигателя практически не отличается от работы двигателя при постоянном напряжении. Скоростные и механические характеристики двигателя 1, 2 и 3 (рис. 2.80), полученные при различных напряжениях, подаваемых на обмотку якоря, в таком режиме работы аналогичны соответствующим характеристикам двигателя при изменении питающего напряжения U.
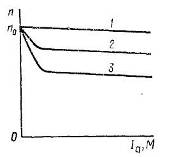
Рис. 2.80 – Скоростные и механические характеристики двигателя с параллельным возбуждением при импульсном регулировании
При уменьшении нагрузки двигателя с параллельным возбуждением возрастают пульсации тока якоря, и при некоторой критической нагрузке наступает режим прерывистых токов. Поскольку условие Iа = 0 имеет место при Е = U, частота вращения при идеальном холостом ходе n0 = U/(сеФ) не будет зависеть от времени т, т.е. от коэффициента регулирования напряжения α. Благодаря этому при некоторой критической частоте вращения nкр, когда двигатель переходит в режим прерывистых токов, угол наклона скоростных и механических характеристик к оси абсцисс резко изменяется. В диапазоне n0> n> nкр эти характеристики имеют примерно такую же форму, как и при регулировании частоты вращения путем включения реостата в цепь якоря. Критическая частота вращения
![]() , (2.102)
, (2.102)
где β = Т/Та. Здесь Та = (L + Lа)/∑r – постоянная времени цепи обмотки якоря.
Среднее напряжение Uср, подаваемое на двигатель, регулируется путем изменения либо продолжительности периода Т между подачей управляющих импульсов на электронный ключ ТK при τ=const (частотно-импульсное регулирование), либо времени τ при постоянном значении Т (широтно-импулъсное регулирование).
Используют также комбинированное регулирование, при котором изменяется как Т, так и τ.
В настоящее время импульсное регулирование двигателей малой мощности и микродвигателей осуществляют с помощью импульсных прерывателей, в которых коммутирующими элементами являются транзисторы. Для регулирования двигателей средней и большой мощностей применяют прерыватели с тиристорами. Так как тиристор, в отличие от транзистора, является не полностью управляемым вентилем, то для его запирания применяют различные схемы искусственной коммутации, обеспечивающие прерывание проходящего тока путем подачи на его электроды обратного напряжения.
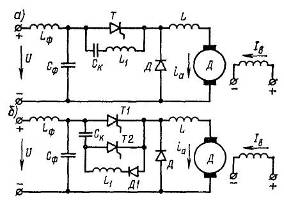
Рис. 2.81 – Схемы включения двигателя постоянного тока через тиристорный импульсный прерыватель при частотно-импульсном и широтно-импульсном регулировании
На рис. 2.81 показаны две простейшие схемы импульсных тиристорных прерывателей. Схему, изображенную на рис. 2.81, а, используют при частотно-импульсном регулировании Тиристор Т отпирается путем подачи импульсов гока управления на его управляющий электрод, запирание же его осуществляется с помощью коммутирующего конденсатора Ск Перед включением тиристора конденсатор Ск заряжен до напряжения U. При подаче отпирающего импульса на управляющий электрод тиристор Т открывается и через двигатель начинает проходить ток ia. Одновременно происходит перезаряд конденсатора Ск – через резонансный контур, содержащий индуктивность L1. После окончания перезаряда, когда полярность конденсатора изменится, к тиристору будет приложено обратное напряжение. При этом он восстанавливает свои запирающие свойства и прохождение тока через тиристор прекращается. В дальнейшем конденсатор заряжается через нагрузку и схема оказывается подготовленной для последующего отпирания тиристора. Время открытого состояния тиристора определяется параметрами резонансной цепи: ![]()
Схему, изображенную на рис. 2.81, б, используют при широтно-импульсном и комбинированном регулирований. В этом случае импульсный прерыватель имеет два тиристора: главный Т1 и вспомогательный Т2. Запирание главного тиристора Т1 осуществляется коммутирующим конденсатором Ск, который подключается к тиристору Т1 в требуемые моменты времени вспомогательным тиристором Т2. После запирания тиристора Т1 коммутирующий конденсатор заряжается от источника питания через тиристор Т2 и якорь двигателя, а после повторного открытия главного тиристора Т1 перезаряжается через цепочку, содержащую индуктивность L1 и диод Д1, и приобретает полярность, требуемую для последующего запирания тиристора Т1.
Торможение при импульсном регулировании. При работе двигателя от импульсного прерывателя можно выполнить его рекуперативное и динамическое торможения. Наиболее интересная особенность рекуперативного торможения при импульсном регулировании – возможность осуществления его при величине э. д. с. двигателя, меньшей напряжения сети. В связи с этим рекуперативное торможение может осуществляться почти до полной остановки.
При рекуперативном торможении импульсный прерыватель ИП включают параллельно якорю двигателя, диод Д–между якорем и питающей сетью. При отпирании прерывателя ИП якорь машины вместе с индуктивностью L замыкается накоротко. При этом увеличивается ток ia и происходит накопление электромагнитной энергии в индуктивностях L + La, а возникающая э. д. с. самоиндукции eL уравновешивает э. д. с. машины Е. При запирании прерывателя ИП ток ia под действием э. д. с. самоиндукции протекает через диод Д и накопленная энергия отдается в сеть. Среднее значение тока, отдаваемого в сеть, определяется разностью между средней э. д. с. якоря Е и напряжением сети U.
Из закона сохранения энергии IaсрE=Iс.срU имеем
![]() . (2.103)
. (2.103)
Следовательно, по мере уменьшения частоты вращения якоря ток Iс.ср, отдаваемый в сеть, уменьшается, хотя ток якоря может оставаться постоянным, а следовательно, неизменным будет оставаться и тормозящий электромагнитный момент.
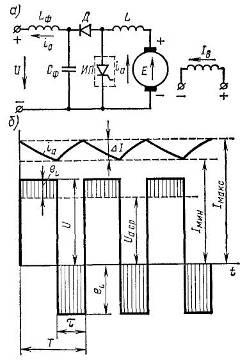
Рис. 2.104 – Схема рекуперативного торможения двигателя постоянного тока при импульсном регулировании
По мере снижения частоты вращения n и э. д. с. Е для поддержания требуемого значения тока Iа увеличивают частоту тока f при частотно-импульсном регулировании или длительность импульса τ при широтно-импульсном регулировании. При малой частоте вращения, когда α увеличивается до единицы, якорь машины остается все время замкнутым накоротко, и отдача энергии в сеть прекращается. Однако ток Iа протекает через якорь и режим торможения осуществляется практически до полной остановки.
Частота вращения nкр, при которой прекращается рекуперативное торможение,
![]() ,
,
где rи.п–сопротивление элементов импульсного прерывателя (тиристоров и индуктивности L), по которым замыкается ток ia.
Динамическое торможение осуществляют аналогично, однако в схеме вместо сети и фильтра LФ-Сф включают реостат, в котором гасится энергия, отдаваемая машиной.
Импульсное регулирование широко применяют при питании двигателей от сети постоянного тока, а также в автономных устройствах, где необходимо использовать аккумуляторы электрической энергии.
2.15 Универсальные коллекторные двигателиВ устройствах автоматики и различных электробытовых приборах широко применяют универсальные коллекторные двигатели мощностью от нескольких ватт до нескольких сотен ватт, которые могут работать от источника как постоянного, так и однофазного тока.
Устройство двигателя. Универсальный коллекторный двигатель устроен принципиально так же, как и двигатель постоянного тока с последовательным возбуждением. Отличие универсального двигателя от машины постоянного тока состоит в том, что магнитная система выполнена полностью шихтованной, а катушки обмотки возбуждения имеют две секции и промежуточные выводы. Выполнение статора и ротора машины шихтованными обусловлено тем, что при работе на переменном токе они пронизываются переменным магнитным потоком; секционирование же обмотки возбуждения вызвано тем, что в этом режиме из-за падения напряжения в индуктивном сопротивлении двигателя номинальная частота вращения оказывается меньшей, чем при работе на постоянном токе: Для выравнивания частот вращения при работе на постоянном токе в цепь якоря включают все витки обмотки возбуждения, а при работе на переменном токе – только часть их, вследствие чего соответственно уменьшается магнитный поток машины.
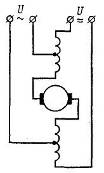
Рис. 2.104 – Схема включения универсального коллекторного двигателя
В универсальных коллекторных двигателях, выпускаемых отечественной промышленностью, обмотку возбуждения разделяют на две части и включают с обеих сторон якоря. Такое включение (симметрирование обмотки) позволяет уменьшить радиопомехи, создаваемые двигателем.
При работе на постоянном токе универсальный коллекторный двигатель ведет себя так же, как двигатель постоянного тока с последовательным возбуждением. Работа же двигателя на переменном токе имеет ряд специфических особенностей.
Электромагнитный момент при работе на переменном токе. В рассматриваемом режиме ток якоря ia и магнитный поток Ф изменяются по синусоидальному закону:
![]() ; (2.104)
; (2.104)
![]() , (2.105)
, (2.105)
где γ – угол, возникающий из-за потерь мощности в стали. Мгновенное значение электромагнитного момента
 . (2.106)
. (2.106)
Графики изменения тока ia, магнитного потока Ф и электромагнитного момента т показаны на рис. 2.105, а. Очевидно, что момент двигателя можно представить в виде двух составляющих: постоянной
![]() (2.107а)
(2.107а)
и переменной, которая изменяется с двойной частотой,
![]() (2.107б)
(2.107б)
Рис. 2.105 – Графики изменения тока, потока и электромагнитного момента универсального коллекторного двигателя и его векторная диаграмма при работе на переменном токе
Электромагнитный момент двигателя является переменным, а в отдельные промежутки времени даже тормозным, однако якорь двигателя вращается с равномерной частотой, так как он имеет сравнительно большой момент инерции. Среднее значение момента
Характеристики двигателя при работе на переменном токе
Векторная диаграмма однофазного коллекторного двигателя (рис. 2.106, б) строится на основании уравнения
![]() (2.108)
(2.108)
где ∑r и ∑x – суммы активных и реактивных сопротивлений в цепи обмотки якоря.
Э. д. с, индуктируемая в обмотке якоря,
![]() , (2.109)
, (2.109)
![]() .
.
Из (6.109) можно получить зависимость частоты вращения от тока якоря:
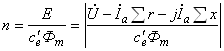 . (2.110)
. (2.110)
На основании (2.108) и (2.109) строятся зависимости n = f(Iа), M = f(Ia) и n= f(M). Так как способ возбуждения машины при работе на постоянном и переменном токе остается неизменным, а формулы (2.108) и (2.109) для частоты вращения n и момента М имеют такую же структуру, как и формулы (2.76) и (2.77а), механические характеристики двигателя при работе в двух указанных режимах будут приблизительно одинаковыми. Однако при переменном токе в числителе (2.109) появляется дополнительный член jİа∑x сдвигающий механическую характеристику двигателя в область более низких частот вращения (рис. 2.106, а, кривая 2). Для того чтобы приблизить ее к механической характеристике, имеющей место при работе на постоянном токе (кривая 1), часть витков обмотки возбуждения при переходе на питание переменным током отключают, т.е. уменьшают магнитный поток машин. При этом обеспечивается одинаковая номинальная частота вращения двигателя в обоих режимах работы (кривая 3).
Рис. 2.106 – Механические и рабочие характеристики универсального коллекторного двигателя
В связи с уменьшением магнитного потока двигателя при работе на переменном токе его магнитная система оказывается менее насыщенной, чем при работе на постоянном токе. Поэтому при работе в рассматриваемом режиме зависимость M = f(Ia) приближается к параболической; зависимость n = f(Ia) к гиперболической в большем диапазоне изменения тока, чем при постоянном токе, а механическая характеристика становится более мягкой.
Рабочие характеристики двигателя при его работе на постоянном (сплошные линии) и переменном (штриховые линии) токе имеют приблизительно одинаковую форму. При переменном токе ток якоря больше, чем при постоянном токе, из-за появления реактивной составляющей и увеличения активной составляющей вследствие возрастания потерь в стали. По этим же причинам к. п. д. двигателя при переменном токе меньше, чем при постоянном.
Регулирование частоты вращения при работе на постоянном токе осуществляют путем включения в цепь якоря реостата, изменения питающего напряжения и тока возбуждения (путем шунтирования обмотки возбуждения реостатом). При переменном токе регулирование частоты вращения осуществляют в основном изменением питающего напряжения; реже–включением реостата в цепь якоря.
Рис. 2.107 – Возникновение реактивной и трансформаторной э. д. с. в универсальном коллекторном двигателе
Коммутация при работе на переменном токе. В этом случае в коммутируемой секции кроме реактивной э. д. с. ер индуктируется еще трансформаторная э.д.с. етр, так как эта секция пронизывается переменным магнитным потоком. Реактивная э.д.с. возникает так же, как и в машине постоянного тока, в результате изменения тока ia в коммутируемой секции при переходе ее из одной параллельной ветви в другую. Однако в данном случае токи +ia и – ia в каждой параллельной ветви (рис. 2.107, а) не остаются постоянными, а изменяются по синусоидальному закону ![]() .
.
Следовательно, реактивная э.д.с. eр, пропорциональная производной di/dt, будет зависеть от величины тока ia в момент коммутации, т.е. в разные моменты времени она будет различной. Если пренебречь периодом коммутации Тк по сравнению с временем Т0 между двумя последовательными коммутациями, то можно считать, что производная
![]() , (2.111)
, (2.111)
а реактивная э.д.с.
![]() , (2.112)
, (2.112)
где ![]() – максимальное значение реактивной э.д.с, которое имеет место при максимальном токе якоря Iam.
– максимальное значение реактивной э.д.с, которое имеет место при максимальном токе якоря Iam.
Таким образом, реактивная э. д.с. совпадает по фазе с током якоря. Она пропорциональна частоте вращения n (период коммутации Тк обратно пропорционален n) и току якоря Iа, так же как в машинах постоянного тока.
Трансформаторная э.д.с. индуктируется в коммутируемой секции переменным магнитным потоком машины. Так как магнитный поток изменяется по закону Ф = Фmsinωt, то при установке щеток на геометрической нейтрали
![]() , (2.113)
, (2.113)
где ωc – число витков в секции.
Следовательно, если не учитывать небольшого угла γ, то она будет сдвинута относительно реактивной э. д. с. на 90°. Результирующая э.д.с. в коммутируемой секции будет изменяться по синусоидальному закону и в некоторые моменты времени будет иметь максимальное значение
![]() . (2.114)
. (2.114)
Установка дополнительных полюсов обеспечивает компенсацию реактивной э.д.с. Трансформаторная же э.д.с. остается нескомпенсированной и создает добавочный ток, замыкающийся через щетки. Это ухудшает коммутацию машины, а следовательно, может вызвать опасное искрение и значительные радиопомехи. Особенно неблагоприятные условия возникают при пуске двигателя, когда трансформаторная э. д. с. достигает большой величины из-за увеличенных значений пускового тока и потока возбуждения.
По указанной причине коллекторные машины переменного тока средней и большой мощностей не получили широкого применения. В коллекторных двигателях малой мощности трансформаторная э.д.с. невелика и практически не ограничивает его нагрузку, как это имеет место в более мощных машинах. Однако срок службы щеток, коллектора и всей машины при работе на переменном токе сокращается по сравнению со сроком службы на постоянном токе.
Список литературы
1. Копылов И.П. Электрические машины. – М.: Энергоиздат, 2004.
2. Брускин Д.Э., Зерохович А.Е., Хвостов В.С. Электрические машины. Т. 1,2. – М.:, Высш. шк., 1987.
3. Токарев Б.Ф. Электрические машины, – М.: Энергоиздат, 1990.
4. Копылов И.П. Математическое моделирование энергетических машин. Учебник. – М.:, Высш. шк., 2001.
5. Гольдберг, Свириденко Я.С. Проектирование электрических машин. Учебник для ВТУзов. – М.:, Высш. шк., 2001.
6. Иванов-Смоленский А.В. Электрические машины. – М.:, Энергия, 1988.
7. Кацман М.М. Электрические машины. – М.: Энергоиздат, 1990.
8. Вольдек А.И. Электрические машины. – Л.: Энергия, 1984.
[1] В дальнейшем для обозначения потока первых гармоник магнитного поля, основных гармоник э.д.с. и токов в формулах и на векторных диаграммах будут применяться соответствующие буквенные символы без индекса «1»,
[2] Для обозначения величин в относительных единицах используют те же буквенные символы, но со звездочками
[3] В генераторном и двигательном режимах чередование полярности главных и добавочных полюсов различно, чем и объясняется наблюдающаяся иногда разница в искрении щеток машины при генераторном и двигательном режимах.
[4] Это не относится к электродвигателям с последовательным возбуждением, в которых коммутационная напряженность машины определяется условиями эксплуатации и при малых частотах вращения может быть большей из-за увеличения тока якоря.
Похожие работы
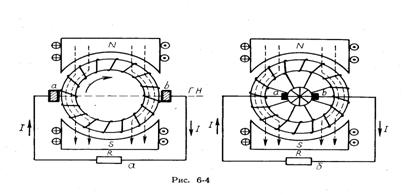
... возникающего в коммутируемых секциях, в машинах высокого напряжения применяют твердые угольные щетки, образующие большие контактные сопротивления в замыкаемых секциях. Улучшение условий коммутации в машинах постоянного тока главным образом осуществляется с помощью дополнительных полюсов. Этот метод основан на следующем. ЭДС самоиндукции в коммутируемых секциях возникает при прохождении этих ...
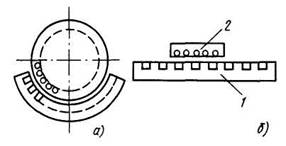
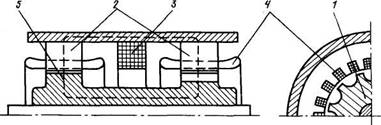
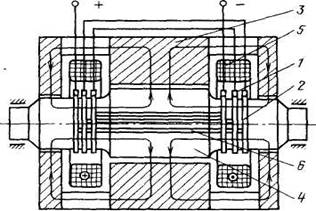
... напряжения между концами вала осуществляют на работающей машине с помощью вольтметра с малым внутренним сопротивлением, при этом прибор присоединяют непосредственно к концам вала. 3.2. Ремонт синхронных двигателей В соответствии с Правилами технической эксплуатации в системе планово предупредительных ремонтов электрооборудования предусмотрено два вида ремонтов: текущий и капитальный. Текущий ...
... нагрузки может быть рекомендован при проведении испытаний машин постоянного тока и синхронных машин на нагревание, а в ряде случаев на надежность. Испытания генераторов постоянного тока методом взаимной индукции. Метод был разработан Г.К Жерве и Ю.Л.Цирлиным авторское свидетельство №222521 Н02К15/00 от 14,08,67г «Способ испытания синхронных машин путём ...
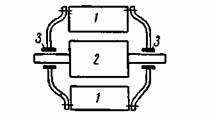
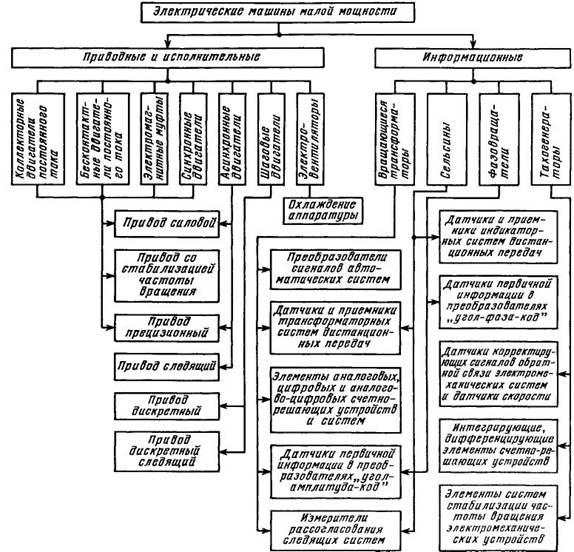
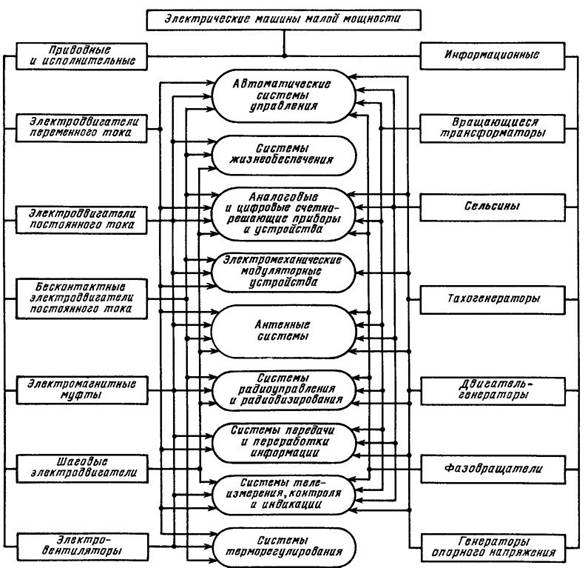
... дешевле сервоприводов. Шаговый привод как недорогая альтернатива сервоприводу наилучшим образом подходит для автоматизации отдельных узлов и систем, где не требуется высокая динамика. Заключение Электрические машины малой мощности имеют, как правило, закрытое конструктивное исполнение, рассчитанное на работу в любом положении в пространстве, длительные сроки сохраняемости. Конструкция этих ...
0 комментариев