Навигация
Анализ установившегося режима системы
21331
знак
4
таблицы
17
изображений
2. Анализ установившегося режима системы
2.1 Составление структурной схемы для установившегося режима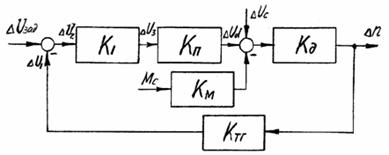
Рисунок 11 - Структурная схема для установившегося режима
Структурная схема дня установившегося режима составляется на основе уравнений элементов САУ в статике или на основе линеаризованной структурной схемы САУ формальным путём приравнивания оператора p к нулю. Следует обратить внимание, что последним способом установившийся режим работы двигателя может быть описан лишь на основе полной передаточной функции двигателя по отношению к Ud и Мс с выходом по частоте вращения, т.е. с учетом внутренней обратной связи двигателя.
2.2 Определение необходимого коэффициента передачиПо полученной структурной схеме в установившемся режиме можно определить статическое отклонение частоты вращения вала Dn при приложении Мc= Mн в разомкнутой системе без обратной связи (без тахогенератора и фильтра) - DnpMc, и в замкнутой САУ - DnзMc. Нетрудно убедиться, что соблюдается равенство
![]() (23)
(23)
где
Kp=K1×Kп×Kд×Kтг (24)
коэффициент передачи замкнутого контура САУ в разомкнутом состоянии.
Отклонение DnpMc рассчитывается непосредственно из структурной схемы в установившемся режиме, при этом согласно (1)
Мс=Мн=СeIн. (25)
Мс=1,98×32,6 = 64,55 (Н×м)
![]() (26)
(26)
Учитывая, что относительное падение частоты вращения в статике при приложении Мс имеет максимальную величину при минимальной частоте вращения в пределах заданного диапазона регулирования D, и, исходя из требований п.п. 2 задания, имеем
![]() (27)
(27)
![]()
Тогда необходимый коэффициент передачи Kpмин может быть найден из уравнения (23), а требуемый из условий статики коэффициент K1 операционного усилителя У1 из уравнения (24), учитывая, что Kpмин в качестве сомножителя имеет коэффициент передачи тиристорного преобразователя равный Kпмин.
![]() (28)
(28)
![]()
![]() (29)
(29)
![]()
![]() (30)
(30)
![]()
![]()
![]() (31)
(31)
![]()
U3=14(В) - по статической характеристике при Udзад=83,16(В)
![]() (32)
(32)
![]()
![]() (33)
(33)
![]()
![]() (34)
(34)
![]()
Статическое отклонение частоты вращения Dn вала при приложении Мс=Мн в разомкнутой системе без обратной связи:
![]() (35)
(35)
![]()
В замкнутой САУ:
![]() (36)
(36)
![]() (37)
(37)
![]()
Статическое отклонение частоты вращения Dn вала при ступенчатом воздействии возмущения DUc=0,1Udзад в разомкнутом состоянии системы:
![]() (38)
(38)
![]()
в замкнутой САУ:
![]() (39)
(39)
Из полученных значений видно, что точность поддержания частоты вращения вала в замкнутой САУ выше, чем в разомкнутой, т.к. статическое отклонение в замкнутой САУ уменьшается на коэффициент ![]() , появляющийся при наличии обратной связи.
, появляющийся при наличии обратной связи.
3. Исследование динамики системы 3.1 Построение аппроксимированной ЛАЧХ системы в разомкнутом состоянии и проверка устойчивости
Некорректированная САУ в разомкнутом, состоянии состоит из последовательно соединенных звеньев:
- усилительного - усилителя У1 с коэффициентом передачи K1, найденным из условия статики во второй части задания;
- инерционного - тиристорного преобразователя с коэффициентом передачи Kп и частотой сопряжения wп= 1/Тп;
- колебательного - электродвигателя с коэффициентом передачи Кд и собственной частотой колебаний ![]() ;
;
- усилительного - тахогенератора с коэффициентом передачи Kп;
- инерционного - фильтра с единичным коэффициентом передачи и частотой сопряжения wф=1/Тф.
Коэффициенты передачи всех звеньев (в том числе и желаемый K1) могут быть объединены в соответствии с (7) в один коэффициентов Kp. Следует учитывать, что наихудшие условия с точки зрения устойчивости при заданных параметрах динамических звеньев будут при максимальном значении Kp в требуемом диапазоне регулирования, т.е. при Kp= Kpмакс.
Процесс построения аппроксимированной ЛАЧХ некорректированной САУ в разомкнутом состоянии можно ускорить, если воспользоваться следующей методикой:
- определить значения ординаты Lp(0) = lg Kpмакс и абсцисс частот сопряжения и колебаний lg wп, lg wд, lg wф;
- на низких частотах графика Lнкp(w) отложить ординату, равную Lp(0), и провести ÷åðåç эту ординату прямую с нулевым наклоном ( параллельно оси абсцисс) до ближайшей меньшей собственной частоты одного из звеньев;
- по мере увеличения частоты изменять наклон ЛАЧХ на -1 лог/дек в абсциссах, соответствующих частотам, сопряжения инерционных звеньев и на -2 лог/дек в абсциссах, соответствующих собственной частоте колебательного звена.
Таким образом, для построения ЛАЧХ необходимы следующие значения:
![]() 1,67
1,67
![]()
![]() 1,57
1,57
![]()
Устойчивость замкнутой САУ может быть определена с помощью критерия Найквиста, который в случае рассматриваемой устойчивой САУ в разомкнутом состоянии и анализа ее частотных характеристик в логарифмическом масштабе сводится к условию, чтобы
![]() (40)
(40)
где частота среза wс системы определяется значением частоты точки пересечения ЛАЧХ САУ в разомкнутом состоянии и оси абсцисс (Lp(wс) = 0). Показатели качества переходного процесса в замкнутой САУ тем лучше, чем больше запас устойчивости по фазе Dj (Dj = 180°-|jp(wс)|) и по амплитуде DL (DL равно абсолютному значению Lp при частоте, где |jp| =180°). В частности, это иллюстрируется рисунком 12, где представлены зависимости перерегулирования s в замкнутой САУ по задающему воздействию от Dj и DL.
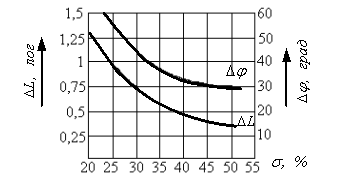
Рисунок. 12. Кривые запасов устойчивости по модулю DL и по фазе Dj от перерегулирования s.
В работе рассматривается минимально-фазовая система, т.е. система в разомкнутом состоянии состоит из звеньев, имеющих однозначную зависимость между АЧХ и ФЧХ. Для такой системы анализ устойчивости можно провести по аппроксимированной ЛАЧХ системы в разомкнутом состоянии без построения ФЧХ. Значение j(wi) при любой выбранной частоте wi для минимально-фазовой системы может быть приближенно определено по усредненному наклону ЛАЧХ в этой частоте и равно
![]() (41)
(41)
где
![]()
![]() (42)
(42)
Усредненный наклон nср(wi) определяется путем нахождения координаты Lв(wi), отстоящей на одну декаду в сторону высоких частот, т.е. Lв(wi) = Lв(10wi), и координаты Lн(wi), отстоящей на одну декаду в сторону низких частот, т.е. Lн(wi) = L(0,1wi).
На рисунке 13 приведена наиболее типичная для заданных вариантов ЛАЧХ Lнкp(w) некорректированной САУ в разомкнутом состоянии, построенная по данной методике. Параметры системы таковы, что некорректированная САУ либо неустойчива, либо имеет малый запас устойчивости, не удовлетворяющий требованиям обеспечения заданного качества регулирования. Для примера, на рисунке 13, определяя значение ФЧХ в частоте wнкс среза некорректированной САУ, имеем Lнкв(wнкс) = - 4 лог, Lнкн(wнкс) = 1,67 лог и
![]() ,(43)
,(43)
т.е. некорректированная САУ неустойчива, т.к.
![]() .(44)
.(44)
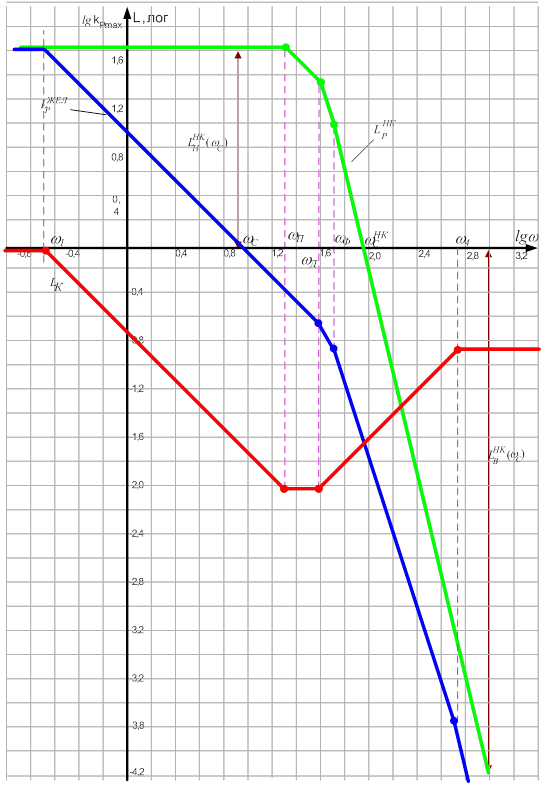
Рисунок 13 – ЛАЧХ
3.2 Построение желаемой ЛАЧХ системы в разомкнутом состоянии
При построении желаемой ЛАЧХ системы в разомкнутом состоянии требованию обеспечения перерегулирования s по задающему воздействию не более 30% необходим (согласно рисунку 12) запас по фазе Dj³45° и по амплитуде DL³0,75 лог. Это соответствует фазе ![]() в частоте среза wc скорректированной САУ
в частоте среза wc скорректированной САУ ![]() или согласно (41) и (42)
или согласно (41) и (42)
![]() лог(45)
лог(45)
Следует иметь в виду, что требование минимального времени регулирования выполняется при максимально возможной величине частоты wс скорректированной системы, а требование максимального ослабления возмущений выполняется при минимальном уменьшении координат Lр в области низких частот (до wс).
Частота сопряжения участков желаемой ЛАЧХ ![]() с различными наклонами следует выбирать с таким расчетом, чтобы передаточная функция корректирующего устройства была бы реализована наиболее просто. Последнее достигается, если частоты сопряжения участков желаемой ЛАЧХ выбирать равными частотам звеньев исходной некорректированной системы. Тогда примем частоты сопряжения участков с наклонами -1 лог/дек и -2 лог/дек равной wд, участков с наклонами -2 лог/дек и -3 лог/дек равной wф, и частоту сопряжения w4 участков с наклонами -3 лог/дек и -4 лог/дек достаточно высокой, чтобы она не влияла на запасы устойчивости DL и Dj. Для такой конфигурации
с различными наклонами следует выбирать с таким расчетом, чтобы передаточная функция корректирующего устройства была бы реализована наиболее просто. Последнее достигается, если частоты сопряжения участков желаемой ЛАЧХ выбирать равными частотам звеньев исходной некорректированной системы. Тогда примем частоты сопряжения участков с наклонами -1 лог/дек и -2 лог/дек равной wд, участков с наклонами -2 лог/дек и -3 лог/дек равной wф, и частоту сопряжения w4 участков с наклонами -3 лог/дек и -4 лог/дек достаточно высокой, чтобы она не влияла на запасы устойчивости DL и Dj. Для такой конфигурации ![]() DL определяется координатой при абсциссе, лежащей на середине отрезка между lg wд и lg wф, т.е. должно соблюдаться неравенство
DL определяется координатой при абсциссе, лежащей на середине отрезка между lg wд и lg wф, т.е. должно соблюдаться неравенство
 лог(46)
лог(46)
или
![]() (47)
(47)
Аналогично определим Lн(wс) = 1 лог (поскольку наклон ![]() до частоты wс равен -1 лог/дек, а lg Kpмакс>1),
до частоты wс равен -1 лог/дек, а lg Kpмакс>1),
![]() Лога согласно (45)
Лога согласно (45)
![]() лог,(48)
лог,(48)
откуда
![]() (49)
(49)
Частота wс среза желаемой ЛАЧХ принимается равной наименьшему из значений, рассчитанных по (47) и (49). Например, для рис.3 имеем:
по (47)![]()
по (49)![]()
Выбираем ![]() .
.
По приведенной выше методике может быть определена частота среза и построена желаемая ЛАЧХ ![]() и иной конфигурации. Таким образом, желаемая ЛАЧХ строится по следующим значениям:
и иной конфигурации. Таким образом, желаемая ЛАЧХ строится по следующим значениям:
![]() ;
; ![]() ;
; ![]() ;
;![]() (рисунок 13).
(рисунок 13).
Похожие работы
... заменить. 6 На выходе отсутствует напряжение Отрыв транзистораVT 1 Заменить транзистор, найти причину выхода его из строя . 3.1. Введение Лабораторный стенд изготовляется с целью проведения испытаний устройств защиты судовых генераторов. Для этого студентами будут выполняться лабораторные работы, целью которых является снятие временных характеристик срабатывания приборов. Чтобы ...





... о выборе лучшего варианта привода принимается на основе сопоставления приведенных затрат на одинаковый объем выпускаемой продукции. В данном проекте необходимо обеспечить регулирование продолжительности времени выпечки с коррекцией по температуре во второй зоне пекарной камеры. При этом необходимо учитывать, что производительность печи при замене системы привода меняться не должна, а также ...
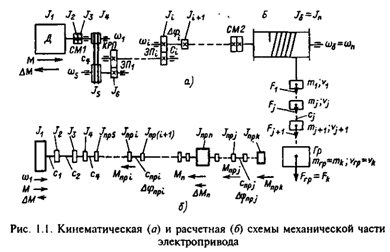


... , кроме электромагнитного момента двигателя. В заключение отметим, что на практике встречаются разветвленные кинематические схемы, которые приводят к разветвленным расчетным схемам механической части Характерным примером являются кинематические схемы многодвигательных электроприводов, в которых двигатели через индивидуальные редукторы воздействуют на общий механизм. 1. Типовые статические ...
... 8729;Ucp∙Ino, MBA Iпо Iпt iу К-1 115 25,1 25,1 61,06 5000 К-2 115 19,1 19,1 45,91 3803,57 К-3 10,5 8,79 8,79 20 159,92 К-4 0,4 25,92 25,92 56084 17,95 6. Выбор электрооборудования системы электроснабжения предприятия 6.1 Выбор трансформаторов собственных нужд главной понизительной подстанции Приемниками собственных нужд подстанции являются ...
0 комментариев