Навигация
Нахождение ЛАЧХ последовательного корректирующего
21331
знак
4
таблицы
17
изображений
3.3 Нахождение ЛАЧХ последовательного корректирующего
устройства, определение передаточной функции корректирующего
устройства
Динамическая составляющая ЛАЧХ ![]() корректирующего устройства (коэффициент передачи K1 учтен в Кpмакс) получается путем вычитания зависимости
корректирующего устройства (коэффициент передачи K1 учтен в Кpмакс) получается путем вычитания зависимости ![]() из
из ![]() , т.е.
, т.е.
![]() .(50)
.(50)
Полная ЛАЧХ корректирующего устройства
![]() .(51)
.(51)
В качестве схемотехнической к реализации корректирующего устройства может быть рекомендован операционной усилитель, включенный по схеме:
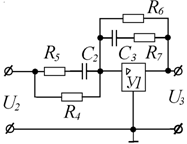
Рисунок 14 - Принципиальная схема корректирующего устройства
Используя методику, изложенную к первой части задания, нетрудно получить выражение передаточной функции в виде:
 (52)
(52)
Постоянные времени числителя передаточной функции соответствуют частотам сопряжения аппроксимированной ЛАЧХ ![]() с положительным переходом, т.е. с наклона -1 на 0 или с 0 на +1 , а знаменатель - частотам сопряжения участков
с положительным переходом, т.е. с наклона -1 на 0 или с 0 на +1 , а знаменатель - частотам сопряжения участков ![]() с отрицательным переходом, т.е. с 0 на -1 или с +1 на 0, если следовать по
с отрицательным переходом, т.е. с 0 на -1 или с +1 на 0, если следовать по ![]() в сторону возрастания частот.
в сторону возрастания частот.
![]()
![]()
![]()
![]()
Из выражения передаточной функции можно составить систему из 5 -и уравнений:
 (53)
(53)
Для решения этой системы необходимо задаться одним из параметров С2=1мкФ, тогда:
![]() , (54)
, (54)
![]() (55)
(55)
![]() (56)
(56)
![]() (57)
(57)
![]() (58)
(58)
3.4 Расчёт кривой переходного процесса на ЭВМ
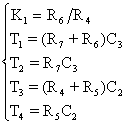
Расчет кривой переходного процесса Dn(t) по возмущающему воздействию может быть проведен моделированием на ЭВМ. Результатом моделирования получается график Dn(t) показывающего изменение параметра (оборотов двигателя) от Dnзад при воздействии возмущения DUc. Моделирование производится на ЭВМ в пакете PDS по следующей структурной схеме:
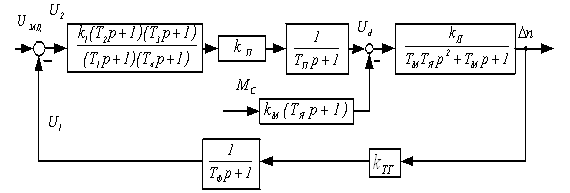
Рисунок 16 – Структурная схема САУ
Таблица 3 – Значения элементов САУ
| Т1=5,6 ,с | Т2=0,05 ,с | Т3=0,027 ,с |
| Т4=0,01 ,с | К1=26,36 | Се=1,98 |
| КПзад=10 | Тф=0,02 ,с | Тя=0,026 ,с |
| Тп=0,05 ,с | J=0,14 | Rя=0,38 ,Ом |
1/Rя=2,63
Т2Т3р2+Т2р+Т3р+1=0,00135р2+0,077р+1
Т1Т4р2+(Т1+Т4)р+1=0,056р2+5,61р+1
Рисунок 17 - Схема разомкнутой нескорректированной системы
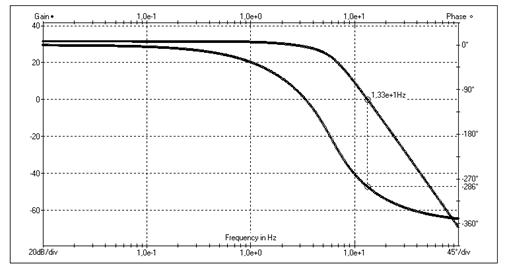
Рисунок 18 - ЛАЧХ разомкнутой нескорректированной системы
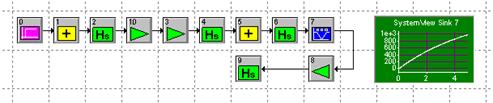
Рисунок 19 – Схема разомкнутой скорректированной системы
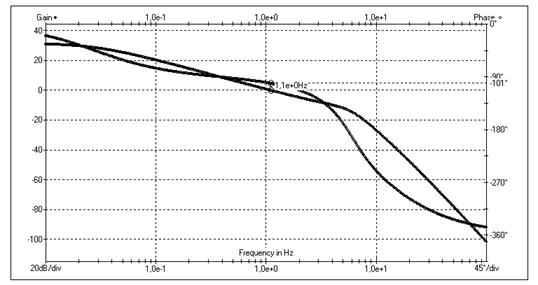
Рисунок 20 - ЛАЧХ разомкнутой скорректированной системы
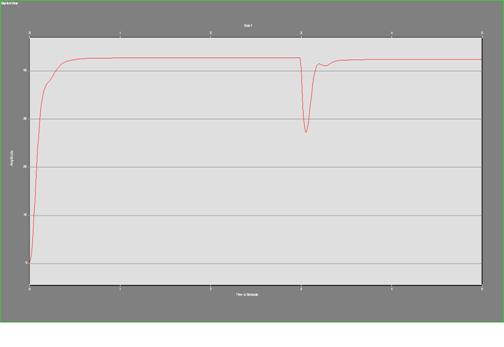
Рисунок 21 – Переходный процесс
Таблица 4 - Сравнение показателей регулирования
| Моделирование на ЭВМ | ||
| по задающему | по возмущающему | |
| Dx | 3,427 | 0,001 |
| tp | 0,53 | 0,68 |
| s | - | 38900 |
| Dxu | ||
| M | 0 | 2 |
Литература
1. Теория автоматического управления, под общей редакцией Нетушила А.В., ч. I, М., “Высшая школа”, 1976.
2. Куропаткин П.В. Теория автоматического управления, М., ”Высшая школа”, 1973.
3. В.В. Солодовников, В.И. Плотников, А.В. Яковлев. Основы теории и элементы систем автоматического регулирования. М., “Машиностроение”,1985.
4. А.П. Протасов. Теория управления. Задания и методические указания к курсовой работе. Для специальности 180400-“Электропривод и автоматизация промышленных установок”, Киров, изд. ВятГТУ, 1996, с.30.
Похожие работы
... заменить. 6 На выходе отсутствует напряжение Отрыв транзистораVT 1 Заменить транзистор, найти причину выхода его из строя . 3.1. Введение Лабораторный стенд изготовляется с целью проведения испытаний устройств защиты судовых генераторов. Для этого студентами будут выполняться лабораторные работы, целью которых является снятие временных характеристик срабатывания приборов. Чтобы ...





... о выборе лучшего варианта привода принимается на основе сопоставления приведенных затрат на одинаковый объем выпускаемой продукции. В данном проекте необходимо обеспечить регулирование продолжительности времени выпечки с коррекцией по температуре во второй зоне пекарной камеры. При этом необходимо учитывать, что производительность печи при замене системы привода меняться не должна, а также ...
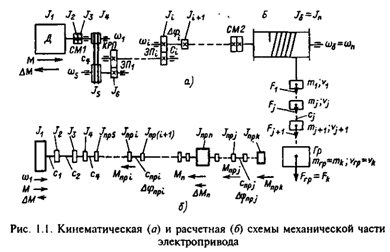

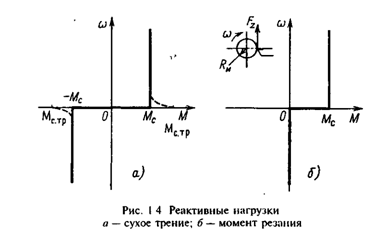

... , кроме электромагнитного момента двигателя. В заключение отметим, что на практике встречаются разветвленные кинематические схемы, которые приводят к разветвленным расчетным схемам механической части Характерным примером являются кинематические схемы многодвигательных электроприводов, в которых двигатели через индивидуальные редукторы воздействуют на общий механизм. 1. Типовые статические ...
... 8729;Ucp∙Ino, MBA Iпо Iпt iу К-1 115 25,1 25,1 61,06 5000 К-2 115 19,1 19,1 45,91 3803,57 К-3 10,5 8,79 8,79 20 159,92 К-4 0,4 25,92 25,92 56084 17,95 6. Выбор электрооборудования системы электроснабжения предприятия 6.1 Выбор трансформаторов собственных нужд главной понизительной подстанции Приемниками собственных нужд подстанции являются ...
0 комментариев