Навигация
4. Расчет валов
Принимаем [tk]/ = 25 МПа для стали 45 и [tk]// = 20 МПа для стали 35
dВ1= 28 мм
4.1 Быстроходный вал
d![]() = 32 мм
= 32 мм
d ³  = 2,62*10-2 мпринимаем по ГОСТу dВ1= 28 мм
= 2,62*10-2 мпринимаем по ГОСТу dВ1= 28 мм
d![]() = 35 мм
= 35 мм
принимаем диаметр вала под манжетное уплотнение d![]() = 32 мм
= 32 мм
d![]() = 44 мм
= 44 мм
принимаем диаметр вала под подшипник d![]() = 35 мм
= 35 мм
принимаем диаметр вала для буртика d![]() = 44 мм
= 44 мм
Тихоходный вал:
dВ2= 50 мм
d![]() = 54 мм
= 54 мм
d ³  = 4,88*10-2 мпринимаем по ГОСТу dВ2= 50 мм
= 4,88*10-2 мпринимаем по ГОСТу dВ2= 50 мм
d![]() = 55 мм
= 55 мм
принимаем диаметр вала под манжетное уплотнение d![]() = 54 мм
= 54 мм
принимаем диаметр вала под подшипник d![]() = 55 мм
= 55 мм
d![]() = 60 мм
= 60 мм
принимаем диаметр вала для колеса d![]() = 60 мм
= 60 мм
d![]() = 95 мм
= 95 мм
Конструктивные размеры зубчатого колеса:
диаметр ступицы d![]() » (1,5…1,7) d
» (1,5…1,7) d![]() = 90…102 мм
= 90…102 мм
lст = 75 мм
длина ступицы lcт » (0,7…1,8) d![]() = 42…108 мм
= 42…108 мм
d0 = 7мм
толщина обода d0 » (2,5…4)mn = 6,25…10 мм
е = 18 мм
Колесо изготовляем из поковки, конструкция дисковая.
Толщина e » (0,2…0,3)b2 = 14,4…21,6 мм
G-1 = 352 МПа
4.4 Проверка прочности валов:
Быстроходный вал: G-1 » 0,43G![]() = 0,43*820 = 352 МПа
= 0,43*820 = 352 МПа
Допускаемое напряжение изгиба [GИ]-1 при [n] = 2,2 Ks = 2,2 и kри = 1:
[GИ]-1 = 72,7 МПа
[GИ]-1 = [G-1/([n] Ks)] kри = 72,7 МПа
YB = 849,2 H
Определяем реакции опор в плоскости zOy :
YA = 305,4 H
YB = Fr/2+Fad1/4a1 = 849,2 H
YA = Fr/2-Fad1/4a1 = 305,4 H
XA = XB = 1520 H
Определяем реакции опор в плоскости xOz :
XA = XB = 0,5Ft = 0,5*3040 = 1520 H
Определяем размер изгибающих моментов в плоскости yOz:
M![]() = 15,27 Н*м
= 15,27 Н*м
MA = MB = 0
M![]() = 42,46 Н*м
= 42,46 Н*м
M![]() = YA*a1 = 305,4*0,05 = 15,27 Н*м
= YA*a1 = 305,4*0,05 = 15,27 Н*м
M![]() = YВ*a1 = 849,2*0,05 = 42,46 Н*м
= YВ*a1 = 849,2*0,05 = 42,46 Н*м
(MFrFa)max= 42,46 H*м
в плоскости xOz:
M![]() = 76 Н*м
= 76 Н*м
MA = MB = 0
M![]() = XA*a1 = 1520*0,05 = 76 Н*м
= XA*a1 = 1520*0,05 = 76 Н*м
MFt = 76 H*м
Крутящий момент T = T2 = 87,779 Н*м
Ми =87,06 Н*м
Вычисляем суммарный изгибающий момент Ми :
Gи = 5,71 МПа
Ми = ![]() = 87,06 Н*м
= 87,06 Н*м
Значит : Gи = 32Mи/pd![]() = 5,71 МПа
= 5,71 МПа
Gэ111 = 8,11 МПа
tк = 16T2/(pd![]() ) = 16*87,779/(3,14*0,053753) = 2,88 МПа
) = 16*87,779/(3,14*0,053753) = 2,88 МПа
Gэ111=![]() = 8,11 МПа
= 8,11 МПа
Тихоходный вал:
G-1 = 219,3 МПа
Для стали 35 по таб. П3 при d < 100 мм GB = 510 МПа
G-1 » 0,43G![]() = 0,43*510 = 219,3 МПа
= 0,43*510 = 219,3 МПа
Допускаемое напряжение изгиба [GИ]-1 при [n] = 2,2 Ks = 2,2 и kри = 1:
[GИ]-1 = 45,3 МПа
[GИ]-1 = [G-1/([n] Ks)] kри = 45,3 МПа
YB = 2022,74 H
Определяем реакции опор в плоскости yOz :
YA = -869,2 H
YB = Fr/2+Fad2/4a2 = 2022,74 H
YA = Fr/2-Fad2/4a2 = -869,2 H
XA = XB = 1520 H
Определяем реакции опор в плоскости xOz :
XA = XB = 0,5Ft = 0,5*3040 = 1520 H
Определяем размер изгибающих моментов в плоскости yOz:
M![]() = -40,85 Н*м
= -40,85 Н*м
MA = MB = 0
M![]() = 95,07 Н*м
= 95,07 Н*м
M![]() = YA*a2 = -869,2*0,047 = -40,85 Н*м
= YA*a2 = -869,2*0,047 = -40,85 Н*м
M![]() = YВ*a2 = 2022,74*0,047 = 95,07 Н*м
= YВ*a2 = 2022,74*0,047 = 95,07 Н*м
(MFrFa)max= 95,07 H*м
в плоскости xOz:
M![]() = 71,44 Н*м
= 71,44 Н*м
MA = MB = 0
M![]() = XA*a2 = 1520*0,047 = 71,44 Н*м
= XA*a2 = 1520*0,047 = 71,44 Н*м
MFt = 71,44 H*м
Крутящий момент T = T3 = 455,67 Н*м
Ми =118,92 Н*м
Вычисляем суммарный изгибающий момент Ми :
Gи = 7,28 МПа
Ми = ![]() = 118,92 Н*м
= 118,92 Н*м
Значит : Gи = 32Mи/pd![]() = 7,28 МПа
= 7,28 МПа
Gэ111 = 28,83 МПа
tк = 16T3/(pd![]() ) = 16*318,47/(3,14*0,0553) = 13,95 МПа
) = 16*318,47/(3,14*0,0553) = 13,95 МПа
Gэ111=![]() = 28,83 МПа < 45,25 МПа
= 28,83 МПа < 45,25 МПа
Похожие работы
... Uред.ст = 5,6. Уточним полученное значение передаточного отношения клиноременной передачи: Uкл.рем.ст. = Uпр / Uред.ст. = 10,8 / 5,6 = 1,93 Определим значения мощности на каждом из валов привода конвейера. Мощность на выходном валу электродвигателя (кВт) определяется по формуле (9). Ртреб.эл. = Ррем1 = 8,87 кВт (9) Мощность на входном валу ...
... кВт; Р2= Рэп ×hк.п×hпк×hм=2.783*0.995*0,995*0,95=2.633 кВт; Р3=Р2×hк.п=2.633*0.98=2.58 кВт; Определяем угловые скорости валов привода по ф. cтр. 11[1]: w1=p×n1/30=3,14×710/30=74.35 с-1; w2=p×n2/30=3,14×284/30=29.74 с-1; w3=p×n3/30=3,14×71/30=7.43 с-1. Определяем крутящие моменты на валах привода по: Т1=Р1/w1=2786/74.35=37.47 Н× ...
... проекта по “Деталям машин” были закреплены знания, полученные за прошедший период обучения в таких дисциплинах как: теоретическая механика, сопротивление материалов, материаловедение. Целью данного проекта является проектирование привода цепного конвейера, который состоит как из простых стандартных деталей, так и из деталей, форма и размеры которых определяются на основе конструкторских, те
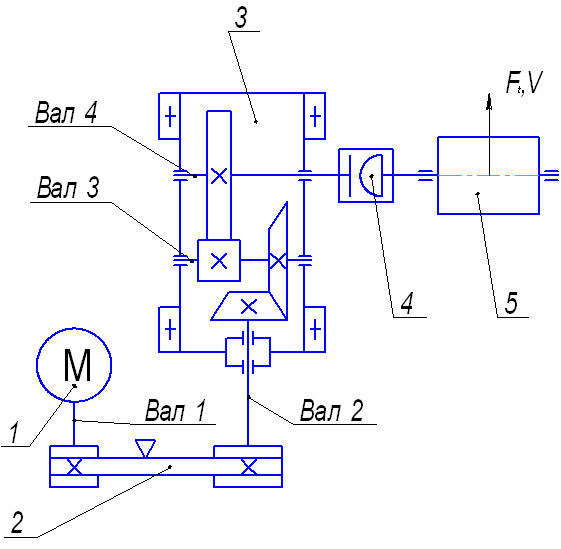
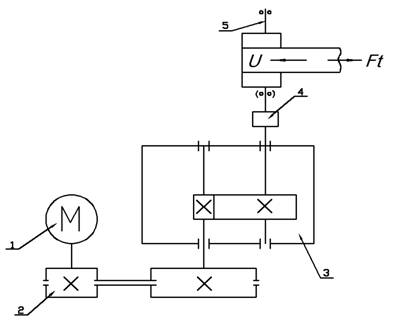
... : 1.3 Определение частоты вращения вала исполнительного механизма и двигателя Частота n4, мин-1, вращения вала: гдеD - диаметр барабана ленточного конвейера, мм; Рисунок 1 - Кинематическая схема привода ленточного конвейера: 1 - электродвигатель; 2 - ременная передача; 3 - двухступенчатый коническо-цилиндрический редуктор; 4 - компенсирующая муфта; 5 - узел барабана. ...
0 комментариев