Навигация
Математическая модель двигателя постоянного тока (ДПТ)
46197
знаков
5
таблиц
13
изображений
2.1 Математическая модель двигателя постоянного тока (ДПТ)
Структурная схема двигателя постоянного тока представлена на рис. 3
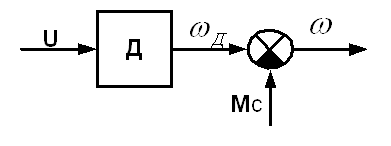
Рис. 3 Структурная схема ДПТ
На рис. 3 использованы следующие обозначения:
Д – двигатель
Мс – момент сопротивления, приложенный к валу двигателя
ωД - скорость вращения вала двигателя
ω – скорость вращения вала с учетом момента сопротивления
Расчётная схема двигателя постоянного тока независимого возбуждения (ДПТ НВ) представлена на рис. 4.
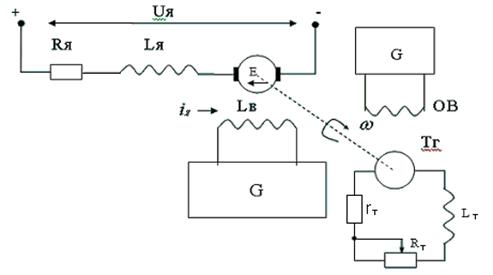
Рис. 4 Расчётная схема ДПТ
На рис. 4 использованы следующие обозначения:
- Lя – полная индуктивность цепи якоря ДПТ НВ, Гн;
- Rя – полное активное сопротивление цепи якоря, Ом;
- Е – ЭДС вращения якоря, В;
- ![]() – ток в цепи якоря, А;
– ток в цепи якоря, А;
- w – механическая угловая скорость, рад/с;
- Lн – полная индуктивность в цепи якоря тормоза, Гн;
- ![]() – полное активное сопротивление цепи нагрузки, Ом.
– полное активное сопротивление цепи нагрузки, Ом.
G – источник постоянного напряжения
Kн – коэффициент нагрузки
Фд – магнитный поток
Из литературы известно, что математическая модель ДПТ НВ имеет следующий вид:
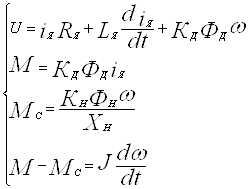
| (2.1) (2.2) (2.3) (2.4) |
где, U – напряжение цепи якоря ДПТ НВ, В;
![]() – электромагнитный коэффициент двигателя;
– электромагнитный коэффициент двигателя;
М, Мс – соответственно момент развиваемый двигателем и момент статического сопротивления, развиваемый тормозом на валу двигателя, ![]() ;
;
J – момент инерции, ![]() ;
;
Хн – полное сопротивление цепи нагрузки, Ом.
![]()
Подставляя уравнения (2.2) и (2.3) в уравнение (2.4) получаем:
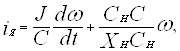
(2.5)
где, ![]() – электромагнитный коэффициент тормоза двигателя.
– электромагнитный коэффициент тормоза двигателя.
Продифференцируем данное уравнение и подставим его в уравнение (2.1):
 (2.6)
(2.6)
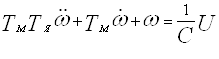
Приведём данное уравнение к стандартному виду
![]() следовательно:
следовательно:
| (2.7) |
 ,
,
где,
![]()
откуда
| (2.8) (2.9) |
![]()
 .
.
Учитывая что ![]() <<
<<![]() , тогда
, тогда
 .
.
Из выражения (2.9) можно сделать вывод, что при увеличении момента сопротивления тормоза путём уменьшения Хн, колебательный процесс, характерный для двигателя, работающего без нагрузки, вырождается в апериодический.
Рассчитаем параметры двигателя. Для этого перепишем уравнение (2.7), считая, что момент сопротивления на валу двигателя равен нулю, т.е. Хн равно бесконечности.
 . (2.10)
. (2.10)
Произведём замену
![]() ,
,  .
.
 . (2.11)
. (2.11)
| (2.12) |
Тогда передаточная функция двигателя имеет вид:

Похожие работы
... также с ним сталкиваются, но не всегда, а вот только 8% опрошенных никогда под него не попадали, но у них все впереди. Данное исследование позволяет сделать вывод, что Закон Мерфи действует в современной системе управления, но только не во всех случаях. Поэтому основное различие между законами мерфологии и «настоящих» наук, то есть тех, которые, если так можно сказать, «окупаются», кроется в их ...
... строк расходной накладной Рис.3.3. Экранная форма редактора списков сотрудников Рис 3.4. Экранная форма редактора классификаторов товаров 3.1 Алгоритм функционирования информационной системы складского терминала Функционирование ИС осуществляется согласно структурному алгоритму, построенному исходя из требований, предъявляемых к выполняемым программой функциям (разделы 1.3 и ...
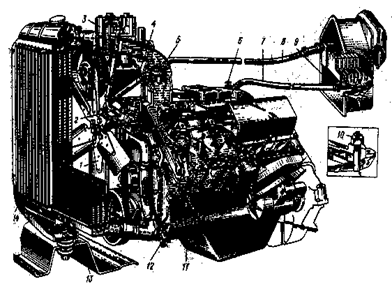
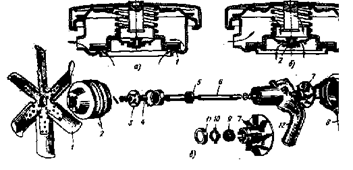
... изменений Далее будет предложен и рассмотрен вариант усовершенствования системы охлаждения рассматриваемого в данной работе двигателя ЗМЗ-406 автомобилей ГАЗ 2705, 3221 «ГАЗЕЛЬ». Описание целей и элементов доработки системы охлаждения двигателя ЗМЗ-406 по пунктам приведены ниже. Основные элементы системы и режимы работы приведены на рис. 20…24. 1. Вместо вентилятора и гидронасоса с ...
... их труда. Однако на всех уровнях управления они в определенной мере используют и выполняют все четыре функции управления: планирования, организации, мотивации и контроля. 1.2. Методы управления организацией. Реализация функций и принципов управления осуществляется путем применения различных методов. Методы управления - это совокупность приемов и способов воздействия на ...
0 комментариев