Навигация
Алгоритм функционирования системы
46197
знаков
5
таблиц
13
изображений
2.2 Алгоритм функционирования системы
Вся система работает следующим образом: пользователь нажимает на панели управления кнопку, отвечающую за то действие, которое ему необходимо, и на микроконтроллер поступает сигнал. До тех пор пока нажата одна любая кнопка, микроконтроллер не воспринимает сигналов от остальных кнопок. Для начала, предположим, что желаемая операция является изменение пространственного положения кресла. В этом случае микроконтроллер определяет, какой привод запрашивается. Затем производится проверка сигналов с датчиков с целью определить не находится ли двигатель в крайнем положение с той стороны, в которую будет осуществляться движение. Если это подтверждается, то дальнейших действий не осуществляется. Если же есть возможность движения для двигателя, то микроконтроллер устанавливает разрешающий сигнал на выходе. Так же микроконтроллером устанавливается направление движения двигателя, и какой двигатель будет задействован. Движение осуществляется до тех пор, пока нажата кнопка на панели управления.
Рассмотрим случай, когда была нажата кнопка для изменения формы сидения. Микроконтроллер устанавливает разрешающий сигнал на работу системы. После этого аппаратно сравниваются сигналы с пар датчиков нагрузки. На основе сравнения осуществляется движение приводов. В первую очередь сравниваются сигналы с датчиков 2 и 3, если они не равны, то включаются соответствующие приводы, двигающиеся в противоположные стороны, причем привод, давление, на датчик которого было больше, движется в отрицательном или обратном направлении, а другой привод движется в положительном и или прямом направлении. Положительное и отрицательное направления выбраны условно, положительное направление – это направление движения к человеку. Через некоторое, заранее заданное время, теоретически достаточное для установления приводов в относительное равновесие, т.е. уравновешивания давление между датчиками, микроконтроллер посылает сигнал, и система переключается на следующую пару датчиков. Следующей парой являются датчики 2 и 4. В этом случае, после сравнения, в движение приводится только привод, соответствующий датчику 4, с целью подстройки его под датчик 2.
Дальше по такому же принципу производится сравнение сигналов с оставшихся двух датчиков, расположенных на спинке сиденья.
После того как спинка настроена, осуществляется подстройка подушки сиденья. Настройка осуществляется так же, как в случае с датчиками 2 и 3.
3 Разработка структурной схемы
Система управления креслом водителя, разрабатываемая в данном проекте, как было сказано ранее, осуществляет действия в двух направлениях: изменение пространственного положения кресла, изменение его формы. При выполнении поставленных задач на управляющие элементы (двигатели) поступают различные задающие воздействия. Эта особенность приводит к необходимости реализации системы, включающей в себя два канала управления, один из которых отвечает за пространственное положение сиденья, другой за форму.
Структурная схема системы управления креслом водителя изображена на рис. 5
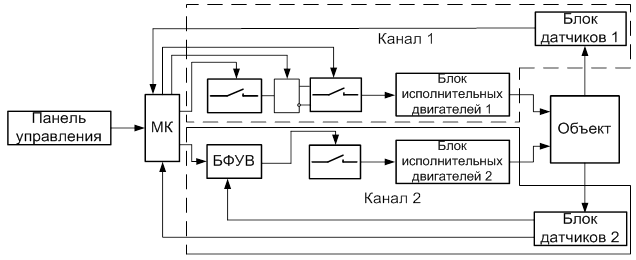 Рис. 5 Структурная схема системы
Рис. 5 Структурная схема системы
В данной схеме приняты следующие обозначения: МК – микроконтроллер, БФУВ – блок формирования управляющих импульсов.
Данная система работает следующим образом: по приходу сигнала с панели управления микроконтроллер проверяет запрашиваемый привод на нахождение в крайнем положении, затем если это не подтверждается, устанавливает разрешающий сигнал на требуемый канал системы управления. Если требуемой операцией является изменение пространственного положения кресла, то микроконтроллер устанавливает разрешающий сигнал на первом ключевом элементе Канала 1, необходимого для подключения последующей схемы к питанию. Затем, зависимости от необходимого направления движения двигателя, микроконтроллером устанавливается «0» или «1» на управление инвертором. После этого сигнал поступает на второй ключевой элемент Канала 1, отвечающий за подключение необходимого двигателя к цепи. В результате исполнительный двигатель приводит желаемую часть сиденья в движение, которое осуществляется до тех пор пока не исчезнет сигнал с панели управления, или привод не перейдет в крайнее положение, в результате чего на выходе датчика (Блок датчиков 1) появится сигнал, который запретит дальнейшую работу микроконтроллера, а следовательно и двигателя.
Рассмотрим случай, когда в работу включается Канал 2. В этом случае БФУВ сравнивает сигналы, приходящие с датчиков. Сравнение осуществляется в определенной последовательности, которую устанавливает микроконтроллер, посылая с заданным интервалом сигналы, подключающие следующую пару датчиков, отключая предварительно предыдущую. После сравнения устанавливается разрешающий сигнал на ключевом элементе Канала 2, в результате чего запускается пара двигателей, движущихся в противоположные стороны, с целью уравновесить давление, действующее на датчики. Весь процесс идет до тех пор, пока не будет произведено сравнение сигналов со всех датчиков.
4. Устройство отдельных блоков системы
Как видно из структурной схемы изображенной на рис. 5, ее можно разбить на несколько функциональных блоков: панель управления, микроконтроллер, Канал 1, Канал 2, объект управлении. Данное разбиение сделано, исходя из функционального назначения приведенных блоков.
Панель управления, состоящая из набора кнопок, не представляет особого интереса. Объектом управления является само кресло, которое достаточно подробно было расписано в первом разделе.
Не известными остаются микроконтроллер, который отвечает за выбор каналов управления, и их функционирования, а также Канал 1 и Канал 2. Однако Канал 2, ввиду его сложности и отсутствия на данный момент необходимых данных по его составляющим, в рамках данного проекта более детально рассмотрен не будет. Его рассмотрение будет произведено, в случае если работа будет продолжена, и результаты будут представлены на инженерной работе.
Похожие работы
... также с ним сталкиваются, но не всегда, а вот только 8% опрошенных никогда под него не попадали, но у них все впереди. Данное исследование позволяет сделать вывод, что Закон Мерфи действует в современной системе управления, но только не во всех случаях. Поэтому основное различие между законами мерфологии и «настоящих» наук, то есть тех, которые, если так можно сказать, «окупаются», кроется в их ...
... строк расходной накладной Рис.3.3. Экранная форма редактора списков сотрудников Рис 3.4. Экранная форма редактора классификаторов товаров 3.1 Алгоритм функционирования информационной системы складского терминала Функционирование ИС осуществляется согласно структурному алгоритму, построенному исходя из требований, предъявляемых к выполняемым программой функциям (разделы 1.3 и ...
... изменений Далее будет предложен и рассмотрен вариант усовершенствования системы охлаждения рассматриваемого в данной работе двигателя ЗМЗ-406 автомобилей ГАЗ 2705, 3221 «ГАЗЕЛЬ». Описание целей и элементов доработки системы охлаждения двигателя ЗМЗ-406 по пунктам приведены ниже. Основные элементы системы и режимы работы приведены на рис. 20…24. 1. Вместо вентилятора и гидронасоса с ...
... их труда. Однако на всех уровнях управления они в определенной мере используют и выполняют все четыре функции управления: планирования, организации, мотивации и контроля. 1.2. Методы управления организацией. Реализация функций и принципов управления осуществляется путем применения различных методов. Методы управления - это совокупность приемов и способов воздействия на ...
0 комментариев