Навигация
Расчет основных размеров и параметров рычажного механизма
12472
знака
4
таблицы
19
изображений
3. Расчет основных размеров и параметров рычажного механизма
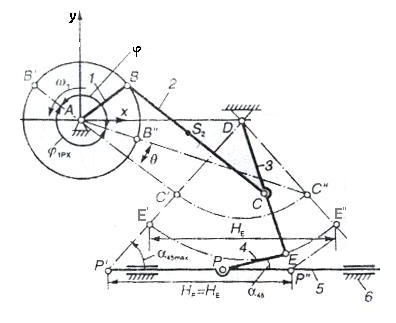
Рис 4 Структурная схема
Для удобства расчетов примем:
![]() ,
, ![]() ,
, ![]()
Рассмотрим ∆DE’E’’:
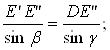
![]()
![]()
С’D=C’’D=DE’ ∙ 0.7=0,16285 м; ![]()
![]()
![]()
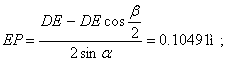
Рассмотрим ∆AC’C’’:
![]()
Рис.5 Структурная схема
Рассмотрим ∆TC’C’’: ![]()
![]()
![]()
![]()
Рассмотрим ∆DC’C’’:
![]()
![]()
![]()
![]()
Рассмотрим ∆ATD:
![]()
![]() т.е.
т.е. ![]()
Рассмотрим ∆ATC’’:
Рассмотрим ∆ATC’:
Следовательно:
![]()
![]()
![]()
![]()
Для удобства занесём все вычисленные длины в таблицу (см. Табл.1):
Табл. 1
| АB (м) | BC (м) | ДЕ (м) | CD (м) | CE (м) |
| 0.0745 | 0.27445 | 0.232645 | 0.16285 | 0.069795 |
| BS2 (м) | S2C (м) | AD (м) | EP (м) | H |
| 0.0961 | 0.17835 | 0.234156 | 0.10491 | 0.214428 |
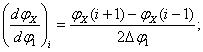
Пусть, ведущее звено обладает Iпр(момент инерции), относительно оси его вращения, который заменяет все моменты инерции звеньев и называется приведенным моментом инерции. Под которым понимают условный момент инерции, которым должно обладать звено приведения, относительно оси его вращения. Так, чтобы кинетическая энергия этого звена в каждом рассматриваемом положении механизма, была равна сумме кинетических энергий всех его звеньев. Из этого равенства определяем приведенный момент инерции ведущего звена:

![]()
 (1)
(1)
В программе Mathematica 5 составляем систему уравнений (2) описывающих зависимость изменения координат центров тяжести звеньев механизма и углов φ2, φ3, в зависимости от изменения φ1 в пределах от 0 до 360 градусов (см. Рис. 6).
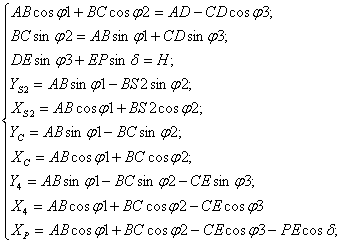 (2)
(2)
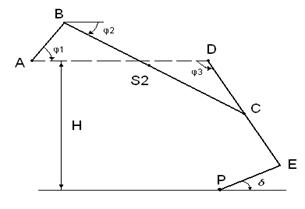
Рис. 6 Структурная схема.
Тело программы:
For[i=137,i<497 , i++ ,
{{p2,p3,p,xp0,ps2,ms2,pc,mc,p4,m4}={2,3,,xp,ys2,xs2,yc,xc,y4,x4}/.
FindRoot[
{lab Cos[1 i]+lbc Cos[2]==lad-lcd Cos[3],
lbc Sin[2]==lab Sin[1 i]+lcd Sin[3],
lde Sin[3]+lep Sin[]Н ,
ys2lab Sin[1 i]-lbs2 Sin[2],
xs2lab Cos[1 i]+lbs2 Cos[2],
yclab Sin[1 i]-lbc Sin[2],
xclab Cos[1 i]+lbc Cos[2],
y4lab Sin[1 i]-lbc Sin[2]-lce Sin[3],
x4lab Cos[1 i]+lbc Cos[2]-lce Cos[3],
xplab Cos[1 i]+lbc Cos[2]-lce Cos[3]-lep Cos[] },
{2,p2},{3,p3},{,p},{xp,xp0},{ys2,ps2},{xs2,ms2},
{yc,pc},{xc,mc},{y4,p4},{x4,m4}]
Полученные значения заносим в пакет Microsoft Excel XP. Все дальнейшие вычисления производятся в этом пакете.
Преобразуем формулу (1):
 (3)
(3)
где:

Подсчитаем моменты инерции и массы:
I2=(m2Ч(L2)2)/12=0.16412 (кг ∙ м2);
I3=(m3Ч(L3)2)/12=0.39873 (кг ∙ м2);
I4=(m4Ч(L4)2)/12=0.0009 (кг ∙ м2);
m2=LbcЧρ2=26.07275 кг;
m3= LdeЧρ3 =22.1013 кг;
m4= LepЧρ4 =9.96645 кг;
m5=550 кг ( по условию );
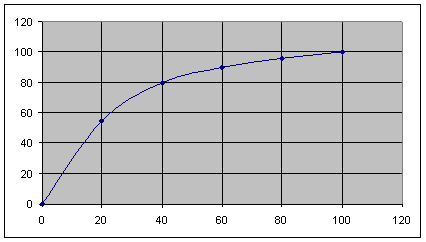
Подставив полученные значения в формулу (3), строим график приведенных моментов инерции (рис 7):
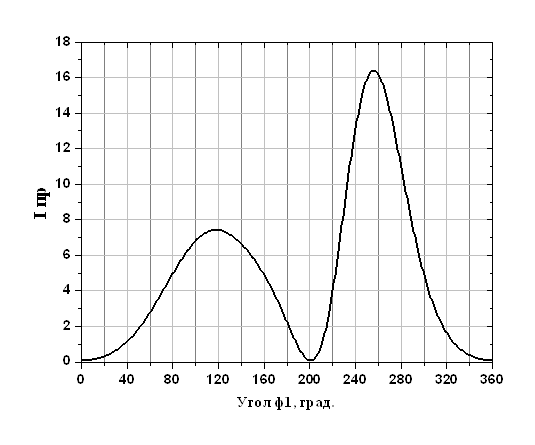
Рис.7 Диаграмма изменения приведенного момента инерции (Iр).
Похожие работы
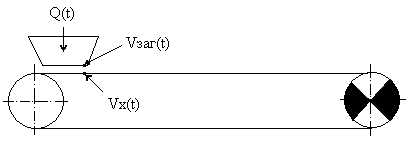
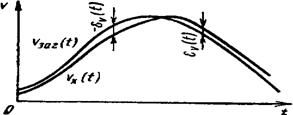
... непрерывного регулирования скорости Перечисленным выше трем условиям наилучшего приближения функции Vx(t) и функции Vзаг(t) можно придать следующую математическую форму. Для обеспечения минимальной вероятности отклонения скорости ленты конвейера в месте загрузки от скорости, пропорциональной грузопотоку больше заданной величины e, необходимо, чтобы P[| Vx(t) – Vзаг(t) | > e] = min. (1) ...
... ребрами) изображают конструктивные и потоковые функциональные структуры [14]. Принципы построения функциональных структур технических объектов рассматриваются в последующих главах курса "Основы проектирования им конструирования" не включенных в настоящее пособие. Для систем управления существуют характеристики, которые можно использовать в качестве критериев для оценки структур. Одна из них - ...
... концентрация пыли в выбросах цеха снизится и будет находится в пределах показателя ПДВ или будет превышать его незначительно. 6.3 Описание технологической схемы очистки выбросов цеха литья пластмасс В цехе литья пластмасс основными источниками загрязнения атмосферного воздуха являются термопластавтоматы в количестве 12 штук и сушильные шкафы, в которых ведется подготовка материала к ...
... продолжительностью 30 с. Кроме того, о пуске такого оборудования оповещают по громкоговорящей связи с указанием его наименования и технологической нумерации. 3.3 Электробезопасность На обогатительной фабрике используется электромеханическое оборудование, электродвигатели, трансформаторы, измерительные приборы, электросварочные агрегаты, светильники, кабели, провода и т.д. Для защиты от ...
0 комментариев