Навигация
Построение диаграммы приведенных моментов сил
12472
знака
4
таблицы
19
изображений
5. Построение диаграммы приведенных моментов сил
Для построения диаграммы приведенных моментов сил вычислим все силы действующие на механизм. В нашем случае это силы тяжести звеньев и сила трения между звеньями 5 и 6.
Fтр=f ∙ N= 0.22 ∙ 5390=1185.8 Н;
G2=m2g= 255.513 H;
G3=m3g= 216.5925 H;
G4=m4g= 97.67121 H;
G5=m5g= 5390 H;
Формула для вычисления приведенных моментов сил имеет вид:
![]()
Полученный график примет вид (рис.8):
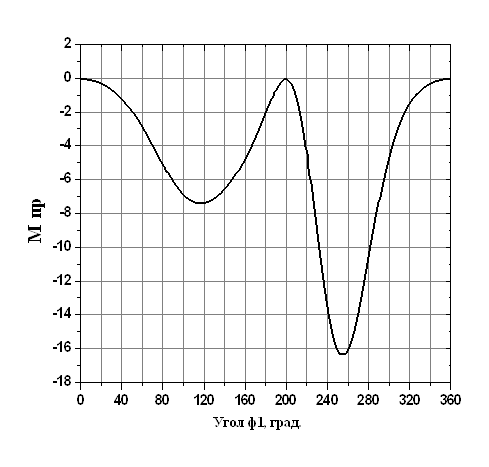
Рис.8 Диаграмма изменения приведенного момента сил (Мпр).
6. Построение диаграммы работы движущих сил и сил сопротивления.
Кривую работы сил сопротивления получаем путём интегрирования графика приведенного момента сил: ![]()
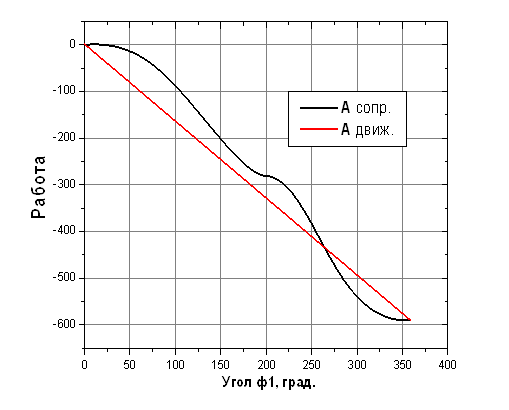
Рис. 9 Диаграмма работ сил тяжести и движущих сил механизма.
Кривую работы движущих сил получаем путем соединения прямой начальной и конечной точек кривой работы сил сопротивления.
7. Построение диаграммы изменения кинетической энергии
Для ее построения необходимо проделать следующую операцию: путем вычитания ординат графика работ сил сопротивления из соответствующих ординат графика движущих сил для каждого из положений входного звена механизма строится диаграмма суммарной (избыточной) работы, которая одновременно является графиком Т.

Рис. 10 Диаграмма изменения кинетической энергии механизма (∆Т).
8.Определение момента инерции маховика
Рассмотрим метод Мерцалова, так как его более удобно применять при вычислении на ЭВМ. Его суть состоит в следующем: необходимо построить график кинетической энергии ∆Т1(φ) звеньев с постоянным приведенным моментом инерции Iпр. ∆Т1 можно получить по формуле
где:; (4)
Т2—кинетическая энергия звеньев с переменным приведенным моментом инерции I’пр , определяемая по средней угловой скорости звена приведения ωср.
![]()
Подставляя полученные ранее значения ∆Т и Iпр в формулу (4) получаем диаграмму ∆Т1.
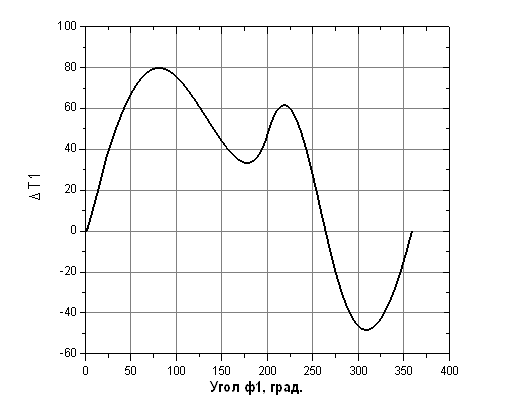
Рис. 11 Диаграмма изменения кинетической энергии (∆Т1).
По диаграмме определяем разность между наибольшим и наименьшим значениями ∆Т1. Она будет равна наибольшему перепаду кинетической энергии ∆Т1max.

2. Синтез кулачкового механизма:

Рис.12 Схема кулачкового механизма.
Законы движения:
- при удалении (с равномерно убывающим ускорением)
![]()
- при приближении (синусоидальный)
![]()
Фазовые углы, град. φу=90; φв=50; φд=20;
Ход толкателя, мм h=50
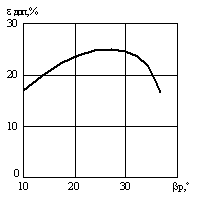
Допускаемый угол давления, град. υдоп=25
Определение характеристик законов движения:
1. Характеристики закона движения на фазе удаления
при 0<φ<=φy
Табл. 2
| Уравнения | Экстремальное значение | |
|
| h | 4.1 |
|
|
| 4.2 |
|
|
| 4.3 |
2. Характеристики закона движения на фазе приближения
при 0<φ<=φв
На фазе приближения перемещение Sв=h-S(φ), а S’в и S”в определяются по тем же формулам, но имеют обратные знаки.
Табл.3
| Уравнения | Экстремальное значение | |
|
| h | 4.4 |
|
|
| 4.5 |
|
|
| 4.6 |

По формулам (4.1)-(4.6) строим графики (см. рис 13-15):
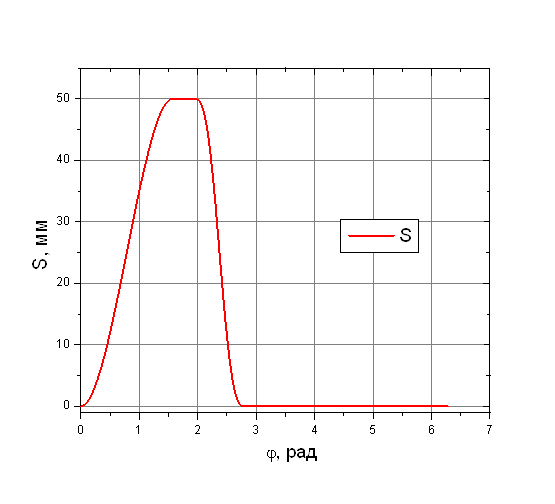
Рис. 13 График зависимости S(φ).

Рис. 14 График зависимости S’(φ).

Рис. 15 График зависимости S”(φ).
3. Построение профиля кулачка
Находим минимальный радиус кулачка R0 для поступательно движущегося роликового толкателя:
 (1)
(1)
где Si и S’iхарактеристики, полученные по формулам (4.1), (4.2), так как на фазе возвращения толкатель движется под действием пружины.
Значения R0i зависят от Si и S’i , то за искомое принимается наибольшее R0э, полученное из уравнения (1).
Для построения профиля кулачка в декартовой системе координат необходимо найти xi=Ricosα и yi= Risinα, где Ri и αi определяются соответственно по формулам (2) и (3):
Ri=R0+Si (2) αi=φi (3)
Для построения действительного профиля кулачка, необходимо от центрового профиля вычесть радиус ролика rр, полученный из соотношения rр<=(0,4-0.5)R0. rр= 24,25818
По полученным координатам стоим действительный профиль кулачка(Рис 16).
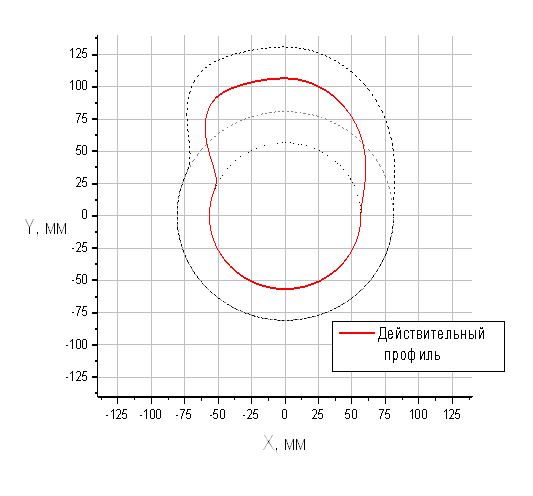
Рис. 16 Профиль кулачка.
ЗАКЛЮЧЕНИЕ
В результате выполнения курсовой работы мы закрепили и обобщили знания и навыки, полученные при изучении дисциплины, научились применять на практике теорию курса.
Выполняя курсовой проект по теории машин и механизмов, овладел навыками использования общих методов проектирования и исследования механизмов. Также овладел методами определения кинематических параметров механизмов, научился творчески оценивать сконструированный механизм с точки зрения его назначения – обеспечивать необходимые параметры движения звена.
Список используемой литературы
1) «Курсовое проектирование по теории механизмов и машин», под общей редакцией Г.Н. Девойно Минск 1986г.
2) «Курсовое проектирование по теории механизмов и механике машин», С.А. Попов Москва 1986г.
3) «Mathematica 4 с пакетами расширений», В.П. Дьяконов Москва 2000г.
Похожие работы
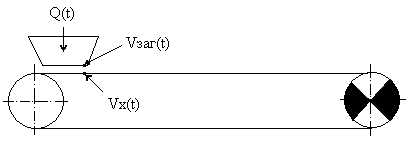
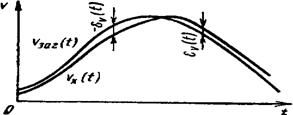
... непрерывного регулирования скорости Перечисленным выше трем условиям наилучшего приближения функции Vx(t) и функции Vзаг(t) можно придать следующую математическую форму. Для обеспечения минимальной вероятности отклонения скорости ленты конвейера в месте загрузки от скорости, пропорциональной грузопотоку больше заданной величины e, необходимо, чтобы P[| Vx(t) – Vзаг(t) | > e] = min. (1) ...
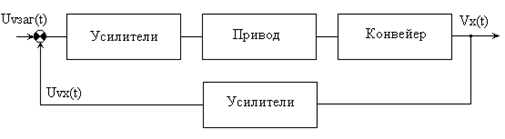
... ребрами) изображают конструктивные и потоковые функциональные структуры [14]. Принципы построения функциональных структур технических объектов рассматриваются в последующих главах курса "Основы проектирования им конструирования" не включенных в настоящее пособие. Для систем управления существуют характеристики, которые можно использовать в качестве критериев для оценки структур. Одна из них - ...
... концентрация пыли в выбросах цеха снизится и будет находится в пределах показателя ПДВ или будет превышать его незначительно. 6.3 Описание технологической схемы очистки выбросов цеха литья пластмасс В цехе литья пластмасс основными источниками загрязнения атмосферного воздуха являются термопластавтоматы в количестве 12 штук и сушильные шкафы, в которых ведется подготовка материала к ...
... продолжительностью 30 с. Кроме того, о пуске такого оборудования оповещают по громкоговорящей связи с указанием его наименования и технологической нумерации. 3.3 Электробезопасность На обогатительной фабрике используется электромеханическое оборудование, электродвигатели, трансформаторы, измерительные приборы, электросварочные агрегаты, светильники, кабели, провода и т.д. Для защиты от ...
0 комментариев