Навигация
Выполняется графическая проверка коэффициента перекрытия и
19286
знаков
12
таблиц
8
изображений
9. Выполняется графическая проверка коэффициента перекрытия и
Определяется погрешность по формулам:
![]()
где ![]() - угловой шаг,
- угловой шаг, ![]() - хорда, соответствующая угловому шагу (измеряется на чертеже). В данном расчете:
- хорда, соответствующая угловому шагу (измеряется на чертеже). В данном расчете:
![]()

10. Выводы: Выполнен геометрический расчет эвольвентной зубчатой передачи, назначены коэффициенты смещения ![]() и
и![]() , которые удовлетворяют условиям отсутствия заострения, отсутствия подреза и обеспечения плавности. Выполнена графическая проверка коэффициента перекрытия (погрешность
, которые удовлетворяют условиям отсутствия заострения, отсутствия подреза и обеспечения плавности. Выполнена графическая проверка коэффициента перекрытия (погрешность ![]() )
)![]()
![]()
![]()
П. Проектирование планетарного редуктора
1. Цель: Рассчитать числа зубьев колес планетарного редуктора по заданному передаточному отношению.
2. Исходные данные: Двухрядный планетарный редуктор с двумя внутренними зацеплениями, передаточное отношение ![]() , число сателлитов
, число сателлитов ![]()
3. Подбор чисел зубьев колес методом сомножителей:
1) Передаточное отношение планетарного механизма: ![]() ;
;
2) Выражение дроби ![]() и представление ее в виде отношения произведения сомножителей:
и представление ее в виде отношения произведения сомножителей:
![]()
Необходимо выбрать один из возможных вариантов, удовлетворяющий всем условиям проектирования планетарных редукторов, а также наиболее подходящий по соображениям габаритности.
3) Проверка выполнения условия соосности:
Для данногомеханизма ![]() . Запись условия соосности через множители:
. Запись условия соосности через множители:
![]()
![]()
Для данного расчета:
1 вар.: ![]() ;
;
2 вар.: ![]() ;
;
3 вар.: ![]() .
.
Получим: ![]() 1 вар.: 3+12=25-10
1 вар.: 3+12=25-10![]() 15=15- условие выполняется;
15=15- условие выполняется;
2 вар.: 4+8=15-3![]() 12=12- условие выполняется;
12=12- условие выполняется;
3 вар.: 8+16=30-6 ![]() 24=24- условие выполняется.
24=24- условие выполняется.
4) Выполнение условия правильного зацепления:
Для данного механизма внутренний зуб: ![]() . Если эти условия не выполняются, то полученные числа зубьев надо умножить на множитель
. Если эти условия не выполняются, то полученные числа зубьев надо умножить на множитель ![]() .
.
1 вар.: ![]()
![]()
2 вар.: ![]()
3 вар.: ![]()
Тогда получим: 1 вар.: ![]() -условие выполняется;
-условие выполняется;
2 вар.: ![]() - условие не выполняется;
- условие не выполняется;
3 вар.: ![]() - условие не выполняется.
- условие не выполняется.
5) Выполнение условия соседства:
Для данного механизма должно выполняться неравенство:![]() , где
, где ![]() - число зубьев большего сателлита. Для данного расчёта:
- число зубьев большего сателлита. Для данного расчёта:
![]() - условие выполняется.
- условие выполняется.
6) Выполнение условия сборки:
![]() , где
, где ![]() - целые числа.
- целые числа.
Для данного расчёта:
![]() - целое условие выполняется при всех
- целое условие выполняется при всех ![]()
Все проверки выполняются. Принимаем:

Изображение схемы планетарного редуктора: Полагая, что модуль колес ![]() :
:
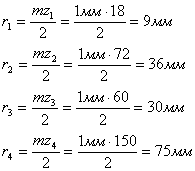
Масштаб: ![]()
5. Выполнение графического исследования - проверка передаточного отношения:
1) Обозначить характерные точки - оси колес и полюсы зацепления (А - ось первого колеса, В - полюс зацепления первого и второго колес, С - ось второго и третьего колес, D - полюс зацепления третьего и четвертого колес).
2) Характерные точки перенести на вертикальную ось радиусов и построить картину распределения линейных скоростей. Для этого провести отрезок ВВ' произвольной длины, изображающий в масштабе скорость точки В; АВ' - линия распределения скоростей первого колеса; точка D - мгновенный центр скоростей третьего колеса; B'D - линия распределения скоростей второго и третьего колес (блока сателлитов); СС - изображает в масштабе скорость точки С; АС - линия распределения скоростей водила Н.
![]()
3) Построить план угловых скоростей. Для этого провести горизонтальную линию угловых скоростей. Из полюса Р, взятого на произвольном расстоянии КР от линии угловых скоростей, провести лучи параллельные линиям распределения скоростей звеньев.
![]() ,
,
отрезки ![]() и
и ![]() измеряются на чертеже в миллиметрах.
измеряются на чертеже в миллиметрах.
Для данного расчета: ![]()
4. Выводы: Рассчитаны числа зубьев колес ![]() , которые удовлетворяют условиям: сборки, соосности, соседства, правильного зацепления. И выполнена графическая проверка передаточного отношения
, которые удовлетворяют условиям: сборки, соосности, соседства, правильного зацепления. И выполнена графическая проверка передаточного отношения ![]() .
.
ЛИСТ 2.
Динамическое исследование основного механизма
1. Цель: Рассчитать маховик, который обеспечит заданную неравномерность вращения механизма ![]()
![]() , и определить закон движения начального звена.
, и определить закон движения начального звена.
2. Исходные данные:
1) Отношение длины шатуна к длине кривошипа: ![]() ;
;
2) Отношение расстояния от точки ![]() до центра тяжести шатуна
до центра тяжести шатуна ![]() к длине шатуна:
к длине шатуна:  ;
;
3) Средняя скорость поршня: ![]() ;
;
4) Номинальное число оборотов вала электродвигателя: ![]() ;
;
5) Максимальное давление плунжера: ![]() ;
;
6) Минимальное давление плунжера: ![]() ;
;
7) Масса шатуна: ![]() ;
;
8) Масса поршня: ![]() ;
;
9) Момент инерции шатуна: ![]() ;
;
10) Момент инерции коленчатого вала (без маховика): ![]() ;
;
11) Маховой момент ротора электродвигателя: ![]() ;
;
12)Коэффициент неравномерности вращения коленчатого вала: ![]() ;
;
13) Маховой момент муфты: ![]() ;
;
14) Момент инерции редуктора, приведённый к валу: ![]() .
.
3. Построение плана основного механизма:
1) Определение основных размеров звеньев механизма по заданным условиям (средняя скорость поршня, число оборотов коленчатого вала, отношение длины шатуна к длине кривошипа):
![]() ;
; ![]() ;
;
![]() .
.
Для данного расчёта : ![]() длина кривошипа.
длина кривошипа.
![]() .
.
Для данного расчета: ![]() - длина шатуна.
- длина шатуна. ![]() - расстояние от точки
- расстояние от точки ![]() до центра тяжести
до центра тяжести ![]() шатуна.
шатуна.
2) Выбор масштаба: ![]() .
.
3) Построение плана механизма в 12-и положениях: угловая координата кривошипа ![]() во всех положениях кратна 30° .
во всех положениях кратна 30° .
4. Построение планов скоростей для всех 12-и положений:
1) Для каждого положения механизма построить план скоростей, задав произвольный постоянный отрезок ![]() , соответствующий скорости точки
, соответствующий скорости точки ![]() .
.
2) Вектор скорости точки С определить по векторной формуле: ![]() , где вектор скорости точки С
, где вектор скорости точки С ![]() направлен по направляющей, вектор скорости точки В
направлен по направляющей, вектор скорости точки В ![]() - перпендикулярно АВ, вектор скорости точки С относительно точки В
- перпендикулярно АВ, вектор скорости точки С относительно точки В ![]() -
-
перпендикулярно ![]() .
.
3) Вектор скорости точки ![]() определить по правилу подобия: точки, принадлежащие одному звену на схеме механизма и концы векторов скоростей этих точек на плане скоростей, образуют подобные фигуры.
определить по правилу подобия: точки, принадлежащие одному звену на схеме механизма и концы векторов скоростей этих точек на плане скоростей, образуют подобные фигуры.
4) Построить проекции векторов скоростей точек ![]() и
и ![]() на ось у .
на ось у .
5. Построение диаграмм зависимостей аналогов скоростей точек механизма и передаточного отношения ![]() от положения механизма
от положения механизма ![]() :
:
1) Определить значения проекции аналога скорости точки ![]() на ось
на ось ![]() для всех положений механизма:
для всех положений механизма: ![]() , где
, где ![]() и
и ![]() - отрезки плана скоростей, соответствующие проекции скорости точки
- отрезки плана скоростей, соответствующие проекции скорости точки ![]() на ось
на ось ![]() и скорости точки
и скорости точки ![]() соответственно (
соответственно (![]() для всех положений механизма).
для всех положений механизма).
2) Определить значения аналога скорости точки ![]() для всех положений механизма:
для всех положений механизма: ![]() , где
, где ![]() - отрезок плана скоростей, соответствующий скорости точки
- отрезок плана скоростей, соответствующий скорости точки ![]() .
.
3) Определить значения проекции аналога скорости точки ![]() на ось
на ось ![]() для всех положений механизма:
для всех положений механизма: ![]() , где
, где ![]() - отрезок плана скоростей, соответствующий скорости точки
- отрезок плана скоростей, соответствующий скорости точки ![]() на ось
на ось ![]() .
.
4) Определить значения передаточного отношения ![]() для всех положений механизма:
для всех положений механизма: ![]() , где
, где ![]() - отрезок плана скоростей, соответствующий скорости относительно точки В.
- отрезок плана скоростей, соответствующий скорости относительно точки В.
5) Значения, полученные для данного расчета, занесены в таблицу:
Таблица № 1.
| Положение механизма | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
|
| 0 | 35 | 48 | 50 | 37 | 20 | 0 | -20 | -37 | -50 | -48 | -35 | 0 |
|
| 37 | 42 | 47 | 51 | 46 | 40 | 37 | 40 | 46 | 51 | 47 | 42 | 37 |
|
| 37 | 31 | 19 | 0 | -17 | -32 | -37 | -32 | -17 | 0 | 19 | 31 | 37 |
|
| 50 | 45 | 28 | 0 | 26 | 43 | 50 | 43 | 26 | 0 | 28 | 45 | 50 |
|
| 0 | 0,056 | 0,077 | 0,082 | 0,059 | 0,032 | 0 | -0,032 | -0,059 | -0,082 | -0,077 | -0,056 | 0 |
|
| 0,059 | 0,05 | 0,03 | 0 | -0,027 | -0,051 | -0,059 | -0,051 | -0,027 | 0 | 0,05 | 0,03 | 0,059 |
|
| -0,21 | -0,19 | -0,12 | 0 | 0,11 | 0,18 | 0,21 | 0,18 | 0,11 | 0 | -0,12 | -0,19 | -0,21 |
|
| 0,059 | 0,067 | 0,075 | 0,082 | 0,074 | 0,064 | 0,059 | 0,064 | 0,074 | 0,082 | 0,075 | 0,067 | 0,059 |
6) Выбор масштабов для диаграмм:
а) Масштаб для положений механизма: ![]() .
.
б) Масштаб для аналогов скоростей и их проекций на ось ![]() :
:
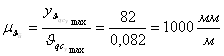 .
.
в) Масштаб для передаточного отношения ![]() :
:
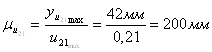
7) Построение диаграмм зависимостей аналогов скоростей точек механизма и передаточного отношения ![]() от положения механизма
от положения механизма ![]() в соответствии с выбранными масштабами.
в соответствии с выбранными масштабами.
8) Выбор масштаба:
![]() .
.
9) Строится индикаторная диаграмма в соответствии с выбранным
масштабом.
7. Построение графика зависимости проекции силы ![]() на ось у от положения механизма
на ось у от положения механизма ![]() :
:
1) В координатах ![]() по оси
по оси ![]() отложить значения
отложить значения ![]() в миллиметрах для каждого положения механизма, приняв ур = хр индикаторной диаграммы компрессора.
в миллиметрах для каждого положения механизма, приняв ур = хр индикаторной диаграммы компрессора.
2) По полученным точкам построить график.
3) Расчет масштаба силы: Р = ![]() , где Р - сила,
, где Р - сила, ![]() - давление,
- давление, ![]() - площадь поршня;
- площадь поршня; ![]() .
.
4) Выбор масштаба для положений механизма:
![]() - этот масштаб будет использоваться также для построения всех остальных графиков и диаграмм.
- этот масштаб будет использоваться также для построения всех остальных графиков и диаграмм.
В качестве динамической модели принимаем начальное звено - кривошип 1. Параметрами динамической модели являются приведённый момент сил ![]() и приведённый момент инерции
и приведённый момент инерции ![]() , действие которых эквивалентно действию реальных сил и масс.
, действие которых эквивалентно действию реальных сил и масс.
1) Построение графиков приведенных моментов сил:
а) Определение суммарного приведенного момента сил для каждого из 12-ти положений механизма: ![]() , где
, где ![]() - приведенный момент силы сопротивления,
- приведенный момент силы сопротивления, ![]() и
и ![]() - приведенные моменты сил тяжестей поршня и шатуна соответственно.
- приведенные моменты сил тяжестей поршня и шатуна соответственно.
б) Приведенные моменты ![]() находятся из равенства мгновенных мощностей модели и механизма:
находятся из равенства мгновенных мощностей модели и механизма:
![]() , для данного расчёта:
, для данного расчёта: ![]() , где
, где ![]() - проекция силы сопротивления на ось у, таким же способом определяются моменты
- проекция силы сопротивления на ось у, таким же способом определяются моменты ![]() и
и ![]() , где
, где ![]() - проекции сил тяжести поршня и шатуна соответственно на ось у .
- проекции сил тяжести поршня и шатуна соответственно на ось у .
в) Выбор масштаба:
 .
.
г) Полученные для данного расчета приведенные моменты сил занесены в таблицу № 2:
Таблица№2.
| Полож Мех-ма | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
|
| -1570 | -1570 | -1570 | -1570 | -1570 | -1570 | 17270 | 17270 | 17270 | 17270 | 17270 | 17270 | |
|
мм | 0 | 88 | 121 | 129 | 93 | 50 | 0 | -553 | -1019 | -1416 | -1330 | -967 | 0 |
| 0 | -8,8 | -12,1 | -12,9 | -9,3 | -5 | 0 | -55,3 | -101,9 | -141,6 | -133 | -96,7 | 0 | |
|
мм | 4,6 | 3,92 | 2,35 | 0 | -2,12 | -4 | -4,6 | -4 | -2,12 | 0 | 2,35 | 3,92 | 4,6 |
| 0,46 | 0,392 | 0,235 | 0 | -0,212 | -0,4 | -0,46 | -0,4 | -0,212 | 0 | 0,235 | 0,392 | 0,46 |
д) По данным таблицы строятся графики зависимостей приведенных моментов сил от положения механизма ![]() .
.
Примечание: так как значения приведенных моментов ![]() в данном расчёте много меньше, чем значения приведённого момента
в данном расчёте много меньше, чем значения приведённого момента ![]() , то на чертеже график считается совпадающим с осью абсцисс, таким образом, графически принимается суммарный момент
, то на чертеже график считается совпадающим с осью абсцисс, таким образом, графически принимается суммарный момент
![]() .
.
2) Построение графиков приведенных моментов инерции второй группы звеньев:
а) Приведенные моменты инерции находятся из равенства кинетических энергий модели и механизма: ![]()
| б) Для звена 3: |
| . |
 .
.
Для звена 2:
![]() ;
; ![]() , где
, где ![]() -
-
приведённый поступательный момент инерции 2-го звена,
![]() — приведенный вращательный момент инерции 2-го звена.
— приведенный вращательный момент инерции 2-го звена.
в) Выбор масштаба:
![]() .
.
Таблица№3.
| Полож Мех-ма | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
|
| 0 | 0,06 | 0,12 | 0,13 | 0,07 | 0,02 | 0 | 0,02 | 0,07 | 0,13 | 0,12 | 0,06 | 0 |
| 0 | 60 | 120 | 130 | 70 | 20 | 0 | 20 | 70 | 130 | 120 | 60 | 0 | |
|
| 0,028 | 0,036 | 0,045 | 0,053 | 0,044 | 0,033 | 0,028 | 0,033 | 0,044 | 0,053 | 0,045 | 0,036 | 0,028 |
| 28 | 36 | 45 | 53 | 44 | 33 | 28 | 33 | 44 | 53 | 45 | 36 | 28 | |
|
| 0,0069 | 0,0057 | 0,0023 | 0 | 0,0019 | 0,0051 | 0,0069 | 0,0051 | 0,0019 | 0 | 0,0023 | 0,0057 | 0,0069 |
| 6,9 | 5,7 | 2,3 | 0 | 1,9 | 5,1 | 6,9 | 5,1 | 1,9 | 0 | 2,3 | 5,7 | 6,9 |
г) По данным таблицы строятся графики зависимостей приведенных моментов инерции второй группы звеньев от положения механизма ![]() .
.
д) График суммарного приведенного момента инерции второй группы звеньев ![]() строится путем сложения графиков всех моментов инерции второй группы звеньев.
строится путем сложения графиков всех моментов инерции второй группы звеньев.
9. Построение графика суммарной работы:
1) Работа сил сопротивления определяется по формуле: 
Таким образом, график работы сил сопротивления строится методом графического интегрирования графика зависимости ![]() от положения механизма
от положения механизма ![]() .
.
2) Так как рассматривается установившееся движение, то выполняется равенство ![]() , где
, где ![]() - значение работы движущих сил за цикл работы в 12-ом положении, момент движущих сил принимаем постоянным, поэтому график работы движущих сил представляет собой наклонную прямую, значение которой в 0-ом положении равно 0, а в 12-ом положении равно
- значение работы движущих сил за цикл работы в 12-ом положении, момент движущих сил принимаем постоянным, поэтому график работы движущих сил представляет собой наклонную прямую, значение которой в 0-ом положении равно 0, а в 12-ом положении равно ![]() .
.
3) График суммарной работы ![]() строится путем сложения графиков работы сил сопротивления и работы движущих сил.
строится путем сложения графиков работы сил сопротивления и работы движущих сил.
3) Определение масштаба:
![]() ,
,
4) где OP- отрезок, используемый для интегрирования графика ![]() . Для данного расчёта:
. Для данного расчёта:
 .
.
10. График кинетической энергии второй группы звеньев:
1) График суммарного приведенного момента инерции второй группы звеньев ![]() может приближенно быть принят за график кинетической энергии второй группы звеньев
может приближенно быть принят за график кинетической энергии второй группы звеньев![]() : так как
: так как ![]() , а
, а ![]() - малая величина
- малая величина ![]() , то
, то ![]() =
=![]() , где
, где ![]() ( средняя угловая скорость 1-го звена) определяется по формуле:
( средняя угловая скорость 1-го звена) определяется по формуле: ![]() ~
~![]() . Для данного расчёта:
. Для данного расчёта: ![]() .
.
2) Определение масштаба:  . Для расчёта:
. Для расчёта: ![]() .
.
11. Определение закона движения начального звена:
1) Так как суммарная работа всех сил, приложенных к механизму(![]() ), идёт на изменение кинетической энергии, то график кинетической энергии
), идёт на изменение кинетической энергии, то график кинетической энергии ![]() имеет такой же вид, как и график суммарной работы
имеет такой же вид, как и график суммарной работы ![]() , но необходимо учесть начальную кинетическую энергию
, но необходимо учесть начальную кинетическую энергию ![]() . В соответствии с теоремой об изменении кинетической энергии
. В соответствии с теоремой об изменении кинетической энергии ![]() , таким образом, ось абсцисс для графика
, таким образом, ось абсцисс для графика ![]() будет отстоять вниз от оси абсцисс для графика
будет отстоять вниз от оси абсцисс для графика ![]() на расстоянии
на расстоянии ![]()
2) Закон движения ведущего звена определяется кинетической энергией первой группы звеньев. Кинетическая энергия всего механизма равна сумме кинетических энергий первой и второй групп звеньев:![]()
![]() . Следовательно, вычитая из графика кинетической энергии всего механизма Т кинетическую энергию второй группы звеньев
. Следовательно, вычитая из графика кинетической энергии всего механизма Т кинетическую энергию второй группы звеньев ![]() , приведенную к масштабу работы, строится график кинетической энергии первой группы звеньев
, приведенную к масштабу работы, строится график кинетической энергии первой группы звеньев ![]() . Значения ординат
. Значения ординат ![]() для 12-ти положений механизма в масштабе
для 12-ти положений механизма в масштабе ![]()
![]() и в масштабе
и в масштабе ![]()
![]() для данного расчета приведены в таблице № 4 (
для данного расчета приведены в таблице № 4 (![]() определяется по формуле:
определяется по формуле:  ).
).
| Положение механизма | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
|
| 35 | 102 | 167 | 183 | 116 | 58 | 35 | 58 | 116 | 183 | 167 | 102 | 35 |
|
| 0,18 | 0,51 | 0,8 | 0,9 | 0,58 | 0,3 | 0,18 | 0,3 | 0,58 | 0,9 | 0,8 | 0,51 | 0,18 |
Таблица №4.
12. Расчет размеров маховика.
1)Необходимый момент инерции звеньев первой группы, который обеспечит заданную неравномерность вращения (δ), рассчитывается по формуле:
 .
.
Имеющийся момент инерции:
![]() , где
, где![]() ,
,
![]() .
.
На основании равенства кинетических энергий
![]() :
: 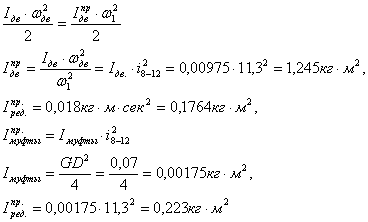
Необходимо установить маховик, момент инерции которого определяется по формуле:
![]()
2) Определение размеров маховика
![]()
Приведенный момент инерции обода можно рассчитать также по формуле:
![]() .
.
Рекомендуемое соотношение размеров: ![]() ;
; ![]() .
.
Плотности материала: стали - ![]() ; чугуна -
; чугуна - ![]() .
.
При расчете D необходимо учитывать соотношение: ![]() ,
,
т.е. ![]() (*).
(*).
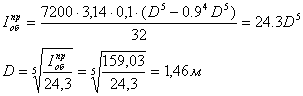
Предположим, что d = 0.9D,а b = 0.1D, материал – чугун:
Соотношение (*) не выполняется, поэтому следует выбрать другие размеры. Пусть d=0.7D, b=0.3D, материал – чугун:
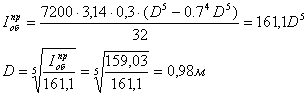
Соотношение (*) не выполняется, поэтому следует выбрать другие размеры. Пусть d=0.9D, b=0.1D, материал –сталь:

Соотношение (*) не выполняется, поэтому следует выбрать другие размеры. Пусть d=0.7D, b=0.3D, материал –сталь:
Так как размеры маховика превышают размеры шатуна, то его устанавливаем на быстроходный вал. Таковым является входной вал редуктора. На основании равенства кинетической энергии :
Предположим, что d = 0.9D, b = 0.1D, материал – чугун:
![]() .
.
Все необходимые условия выполняются, поэтому ![]() ,
, ![]() ,
, ![]() , материал, из которого изготовлен маховик, – чугун.
, материал, из которого изготовлен маховик, – чугун.
Определение масштаба:
![]() .
.
Похожие работы
... лакирование матовым лаком НЦ-243 на лакообливной машине и сушка в конвективной сушильной камере или на стеллажах. 2. Автоматизированные линии отделки. Компоновка РТК для нанесения лакокрасочных материалов На мебельных предприятиях для отделочных работ широко применяются конвейерные, полуавтоматические и автоматические линии. Они включают станки для нанесения материалов, установки для сушки и ...
... машины широко используют в качестве гидродвигателей. Гидродвигатели используются в гидроприводах палубных механизмов. 6. Элементы объёмного гидропривода: рабочие жидкости; гидроаппаратура, гидролинии и гидроёмкости, кондиционеры рабочей жидкости Объемным гидроприводом наз совокупность объем гидромашин, гидроаппаратуры и вспомогательных устройств соед. с помощью гидролиний. Предназначена для ...
... критерий гидродинамического подобия; Л. Прандтль (1875—1953), разработавший теорию турбулентных потоков. Не остались в стороне от развития технической гидравлики и ученые России. Инженерное направление в гидромеханике интенсивно разрабатывалось в стенах Петербургского института путей сообщения, где была создана первая в России гидравлическая лаборатория и плодотворно работала группа ученых под ...
... транспортирования обрабатываемых деталей. 6.2 Лаборатории Лабораторные исследования являются обязательной и весьма важной частью комплекса геологоразведочных работ на весь период их проведения. При проведении предварительной разведки на месторождении Родниковое предусматривается химические и спектральные исследования, пробирный анализ, флюоронисцентный – рентгено-радиометрический метод. В ...
0 комментариев