Во многих областях науки и техники , а также отраслях наукоемкой промышленности , таких как : авиационная , космическая , химическая , энергетическая , - являются весьма распространенные задачи прогноза протекания процессов , с дальнейшей их коррекцией .
Решение такого рода задач связано с необходимостью использования численных методов , таких как : метод прогноза и коррекции , метод Адамса-Башфорта , метод Эйлера , метод Рунге-Кута , и др. При этом , стоит задача решения системы линейных дифференциальных уравнений первого порядка одним из методов интегрирования , на произвольном промежутке времени . Одним из оптимальных методов дающих высокую точность результатов – является пяти точечный метод прогноза и коррекции Адамса-Башфорта . Для повышения точности метода используется трех точечный метод прогноза и коррекции с автоматическим выбором шага , что приводит к универсальному методу интегрирования систем дифференциальных уравнений произвольного вида на любом промежутке интегрирования .
Разработка программных средств реализующих расчет точного прогноза протекания процессов , является важнейшей вспомогательной научно-технической задачей .
Целью данной курсовой работы является разработка алгоритма решения систем линейных дифференциальных уравнений первого порядка пяти точечным методом прогноза и коррекции Адамса-Башфорта .
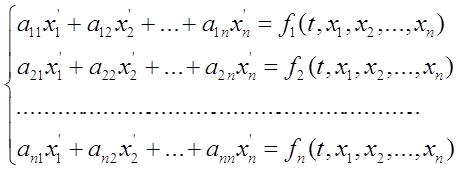
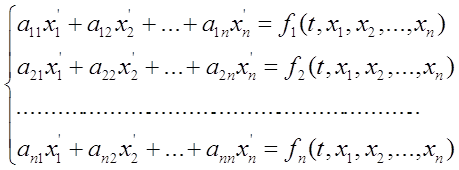
1. ПОСТАНОВКА ЗАДАЧИРассмотрим произвольную систему линейных дифференциальных уравнений первого порядка :
 (1.1)
(1.1)
тогда как :
А =  (1.2)
(1.2)
где А заданная матрица размером N x N .
![]() - вектор с N координатами , который подлежит определению ;
- вектор с N координатами , который подлежит определению ;
N – произвольное целое число ;
![]()
заданные вектора правых частей с N координатами .
С использованием метода прогноза и коррекции Адамса-Башфорта пятого порядка , необходимо получить значения неизвестных для заданных временных интервалов . Для стартования метода необходимо использовать метод прогноза и коррекции третьего порядка с переменным шагом , на заданных временных промежутках ..
2. МЕТОДЫ РЕШЕНИЯ 2.1. Метод прогноза и коррекцииМетод прогноза и коррекции относится к задачам класса Коши , а именно к численным решениям многошаговыми методами .
Рассмотрим задачу Коши :
![]() ,
, ![]() (2.1.1)
(2.1.1)
Подставим в (2.1.1) точное решение y(x) , и проинтегрируем это уравнение на отрезке
![]() , тогда получим :
, тогда получим :
 (2.1.2)
(2.1.2)
где в последнем член предполагаем , что p(x) полином , аппроксимирующий f(x,y(x)) . Чтобы построить этот полином , предположим , что
![]() - приближения к решению в точках
- приближения к решению в точках ![]() . Будем считать для начала , что узлы Xi
расположены равномерно с шагом h . тогда fi = f(xi,yi), ( i=k,k-1,k-2,…,k-N) есть приближения к f (x,y(x)) в точках
. Будем считать для начала , что узлы Xi
расположены равномерно с шагом h . тогда fi = f(xi,yi), ( i=k,k-1,k-2,…,k-N) есть приближения к f (x,y(x)) в точках ![]() и мы в качестве P возьмем интерполяционный полином для выбора данных (xi,fi) ,
и мы в качестве P возьмем интерполяционный полином для выбора данных (xi,fi) ,
( i =k,k-1,k-2,…,k-N) . Таким образом , P – полином степени N , удовлетворяющий условиям P(xi)=fi , ( i = k,k-1,k-2,…,k-N) . В принципе , можем проинтегрировать этот полином явно , что ведет к следующему методу :
 (2.1.3)
(2.1.3)
В простейшем случае , когда N=0 , полином P есть константа , равная fk , и (2.1.3) превращается в обычный метод Эйлера :
![]() (2.1.4)
(2.1.4)
Если N=1 , то P есть линейная функция , проходящая через точки
(xk-1,fk-1) и (xk,fk) , т.е.
 (2.1.5)
(2.1.5)
интегрируя этот полином от Xk до Xk+1 , получим следующий метод :
 (2.1.6)
(2.1.6)
который является двухшаговым , поскольку использует информацию в двух точках xk и xk-1 . Аналогично , если N=2 , то P - есть кубический интерполяционный полином , а соответствующий метод определяется формулой :
 (2.1.7)
(2.1.7)
Отметим , что метод (2.1.6) – есть метод Адамса-Башфорта второго порядка , (2.1.7) – метод Адамса-Башфорта четвертого порядка .
Для стартования метода (2.1.7) необходимы сведения о четырех предыдущих точках . Соответственно данный метод требует вычисления стартующих данных . Воспользуемся для нахождения второй точки одношаговым методом Эйлера , который имеет вид :
![]()
Таким образом , подставляя начальные условия, мы находим вторую точку . Следует заметить , что степень точности совпадает со степенью точности остальных методов , что является существенным фактором в стартовании метода прогноза и коррекции .
Ввиду того , что стартовые методы имеют более низкий порядок , в начале приходится считать с меньшим шагом и с использованием большего промежутка времени . В данном случае метод Эйлера для дальнейшего интегрирования не оправдывает себя . Для этих целей воспользуемся трехшаговым методом прогноза и коррекции с переменным шагом .
Рассуждая также , как для метода Адамса-Башфорта , который излагается в работах : [1],[2],[3] , мы мы приходим к формулам :
Прогноз :
![]() (2.1.8)
(2.1.8)
Коррекция :
 (2.1.9)
(2.1.9)
где h - шаг интегрирования , изменяющийся на малом промежутке времени в соответствии с условиями Рунге :
 ,
,
где в свою очередь ![]() - малое конкретное значение , при невыполнении условия которого увеличивается шаг h=h*N
а
- малое конкретное значение , при невыполнении условия которого увеличивается шаг h=h*N
а ![]() - малое конкретное значение , при невыполнении условия шаг соответственно уменьшается h=h/N , где N - некоторое целое число больше единицы .
- малое конкретное значение , при невыполнении условия шаг соответственно уменьшается h=h/N , где N - некоторое целое число больше единицы .
Оптимально , для вычисления новой точки , с помощью метода прогноза и коррекции , используется формула :
 (2.1.10)
(2.1.10)
Таким образом, мы воспользовались простым трех шаговым методом прогноза и коррекции , для стартования метода Адамса-Башфорта . Преимущества данного метода заключаются :в его высокой точности , авто подборе шага , что во много раз повышает точность самого метода Адамса-Башфорта , и делает его оптимальным для задач такого рода .
Метод Адамса-Башфорта использует уже посчитанные значения в точке Xk и в предыдущих точках . В принципе , при построении интерполяционного полинома , мы можем использовать и точки Xk+1,Xk+2,… . Простейший случай при этом состаит в использовании точек Xk+1,Xk,…,Xk-N
и построения интерполяционного полинома степени N+1 , удовлетворяющего условиям P(Xi)=fi , (I=k+1,k,…,k-N) . При этом возникает класс методов , известных как методы Адамса-Моултона . Если N=0 , то p – линейная функция , проходящая через точки (Xk,fk) и (Xk+1,f k+1) , и соответствующий метод :
 (2.1.11)
(2.1.11)
является методом Адаиса-Моултона [2] , именно им мы воспользовались в формуле (2.1.9) – коррекции спрогнозированной точки в трех шаговом методе . Если N=2
, то p – кубический полином , построенный по точкам ![]() и соответствующий метод :
и соответствующий метод :
 (2.1.12)
(2.1.12)
является методом Адамса-Моултона четвертого порядка . В силу того , что по сути fk+1 – неизвестная , то методы Адамса-Моултона (2.1.11),(2.1.12) называют неявными . В тоже время методы Адамса-Башфорта – называют явными .
Теперь воспользовавшись явной формулой (2.1.7) , и неявной формулой (2.1.12) , используя их совместно , мы приходим к методу Адамса-Башфорта четвертого порядка :
 (2.1.13)
(2.1.13)
![]()

Стоит обратить внимание , что в целом этод метод является явным . Сначало по формуле Адамса-Башфорта вычисляется значение![]() , являющееся
“прогнозом” . Затем
, являющееся
“прогнозом” . Затем ![]() используется для вычисления приближенного значения
используется для вычисления приближенного значения ![]() , которое в свою очередь используется в формуле Адамса-Моултона . Таким образом формула Адамса-Моултона “корректирует” корректирует приближение , называемое формулой Адамса-Башфорта .
, которое в свою очередь используется в формуле Адамса-Моултона . Таким образом формула Адамса-Моултона “корректирует” корректирует приближение , называемое формулой Адамса-Башфорта .
Теперь рассмотрим произвольную систему линейных дифференциальных уравнений первого порядка :
где
A = 
Заданная матрица размером NxN ; ![]() - вектор с N координатами , который подлежит определению . В связи с тем , что связь между искомыми неизвестными
определяется матрицей коэффициентов A , на каждом шаге по времени , необходимо решить систему относительно неизвестных скоростей , для её решения воспользуемся модифицированным методом Гаусса , который описан в разделе 2.2 .
- вектор с N координатами , который подлежит определению . В связи с тем , что связь между искомыми неизвестными
определяется матрицей коэффициентов A , на каждом шаге по времени , необходимо решить систему относительно неизвестных скоростей , для её решения воспользуемся модифицированным методом Гаусса , который описан в разделе 2.2 .
Далее, интегрируя сначала ранее описанными методами : методом Эйлера на первом шаге , трех точечным методом прогноза и коррекции с авто подбором шага , на малом промежутке времени и с малым начальным шагом , для повышения точности стартующих методов на оставшемся промежутке времени производим интегрирование с постоянным шагом – пяти точечным методом прогноза и коррекции Адамса-Башфорта (2.1.13) , [2] , [3] .
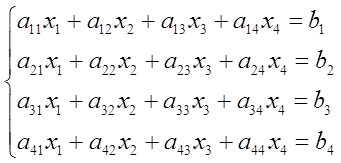
2.2 Модифицированный метод ГауссаКак типичный пример решения систем линейных дифференциальных уравнений , рассмотрим систему четырех линейных алгебраических уравнений .
Для решения системы четырех линейных алгебраических уравнений с четырьмя неизвестными модифицированным методом Гаусса необходимо
Составить систему :  (2.2.1)
(2.2.1)
1) Каждое уравнение делиться на коэффициент при X1
2) Теперь образуем нули в первом столбце матрицы системы : вычитаем 2-ое
из 1-ого , 3-е из 2-ого , 4-ое из 3-его :
(2.2.2)
3) Повторив еще раз эти операции получим систему двух уравнений с двумя неизвестными , решение которой можно получить по формулам Крамера :
 (2.2.3)
(2.2.3)
Решение же X1 и X2 можно получить , подставив в какое-либо из уравнений систем (2.2.1) и (2.2.2) и разрешив эти уравнения относительно соответствующей переменной .
3. ОПИСАНИЕ АЛГОРИТМАПрограмма начинается с вывода сообщения о программе . После происходит считывание необходимых исходных данных из файла , для дальнейшей работоспособности алгоритма , а именно – начальных условий и матрицы коэффициентов системы линейных дифференциальных уравнений первого рода , начального шага интегрирования , левого и правого условий Рунге , время интегрирования по трех шаговому методу прогноза и коррекции , время интегрирования по пяти точечному методу Адамса-Башфорта .
С помощью метода Эйлера находим дополнительные начальные условия. Решение систем линейных дифференциальных уравнений мы описываем отдельной процедурой , что облегчает дальнейшую алгоритмизацию .
Далее составляем цикл , для реализации алгоритма нахождения всех Yk+1 точек на заданном малом промежутке времени , и проверкой на условия Рунге , по трех шаговому методу прогноза и коррекции с авто подбором шага . После чего мы организовываем цикл , реализующий алгоритм нахождения точек по методу Адамса-Башфота , на заданном большом промежутке времени и с шагом автоматически подобранным предыдущим методом .
Вычисленные данные записываем файл , по ним формируем массив данных , которые выводим в сответствии с масштабированием на экран в виде графиков .
Блок-схема приведена в Приложении 1 .
4.ОПИСАНИЕ ПРОГРАММЫПрограмма реализующая универсальный алгоритм для решения систем линейных дифференциальных уравнений первого порядка произвольного вида , - построена по принципам объектно-ориентированного программирования .Основная программа построена на объектной библиотеке VFH , реализующей возможности реализации гибкого интерфейса между программой и пользователем .
Основная программа включает в себя только один модуль PACM , и использует всего два метода объекта TApplPandC , - метод Application - рабочий цикл программы ; деструктор Done – реализует разрушение таблицы виртуальных методов , и операций , связанных с завершением программы .
Модуль PACM включает в себя модули библиотек - реализующих построение интерфейса . Модуль реализующий алгоритм метода Адамса-Башфорта , и по вычесленным данным строящий график , есть – PACMBtn .
Главным родителем всех объектов есть объект – Tobject . Основным рабочим объектом библиотеки VFH есть объект Tform . Рассмотрим потомка являющегося типичным представителем родителя TForm - TApplPandC . Он имеет два виртуалых метода : MouseHandler : Boolean Б – выходным параметром которого есть признак закрытия формы , и метод FormCreate - реализующий построение интерфейса формы . Не виртуальный метод Application - предназначен для создания формы , конфигурирования программной среды , и дальнейшего управления программой .
Модуль реализующий создание и управления главного и субменю , есть – PACMMenu , позволяющий пользователю изменять параметры и настройки системы , предоставляющий справку о разработчике , а также дает доступ к справочной системе PrandCo M Help System . Данные свойства меню реализуют объекты TMenu , и THelpForm , объектной библиотеки VFH .
Теперь рассмотрим модуль PACMBtn – рреализующий алгоритм построения вычисленных данных . Процедура реализующая алгоритм пяти точечного метода прогноза и коррекции Адамса-Башфорта , - MethodAdamsaBashforta ( h,tp,ta : real ; NU : array[1..N] of real ) – параметры которой представляют : h - начальный шаг интегрирования ; tp – время интегрирования трех точечным методом прогноза и коррекции , ta – время интегрирования по методу Адамса-Башфорта , NU – массив начальных условий . Данная процедура способна производить решения систем линейных дифференциальных уравнений произвольного размера , на произвольном промежутке времени интегрирования . Вычисленные данные записываются в файлы prandcom*.df . Метод реализующий алгоритм построения вычисленных данных произвольной степени сложности , с возможностью построения графиков с не линейно изменяющимся шагом , построения одновременно любого количества графиков , - есть объект TCartFile , обладающего всеми свойствами родителей Tform , Tchart .
К заключению стоит заметить , что программа PrandCo M version 2.41 - разработана на языке Borland Pascal под защищенный режим работы процессора и имеет доступ ко всей оперативной памяти компьютера . Реализует гибкий интерфейс , облегчающим работу с программным обеспечением . Позволяет решить систему линейных дифференциальных уравнений первого порядка методом Адамса-Башфорта , с возможность просмотра результатов вычисления в виде графиков .
Как показали тестовые программы – разработанный алгоритм предоставляет точность вычислений , погрешность которых не превышает 1% .
Тексты программной оболочки PrandCo M version 2.41 приведены в приложении 4 .
5. ПРИМЕРЫ РАСЧЕТОВДля анализа достоверности получаемых результатов рассмотрим следующие примеры :
5.1.Решение одного дифференциального уравненияПервым этапом анализа достоверности была проверка правильности решения одного дифференциального уравнения . Полученное численное решение сравнивается с аналитическим .
Пусть требуется решить уравнение :
при начальном условии y(0)=1 , 0<=x<=1 , и шаге интегрирования h=0.1 . Это линейное уравнение , имеющее следующее точное решение :
![]()
которое поможет нам сравнить точность численного решения для случая с постоянным шагом , т.к. точность решений с переменным шагом выше . Результаты расчета представлены в Таблице 1 .Как видно из таблицы, отличие между численными и аналитическими решениями удовлетворительное даже для такого большого шага , и не превышает 2% . Теперь решим этот же пример тем же методом , но с переменным шагом . Получаем любопытные зависимости точности от выбора шага , а также шага сходимости , - которые носят периодический характер . Результаты исследования приведены в таблице 2 . Как мы видим, погрешность резко уменьшается с использованием метода с переменным шагом , и показывает очень высокую точность решения для численных методов , не превышающею 1% .
Таблица 1
Таблица 2
| Начальный шаг | Максимальная погрешность | Сведение к шагу |
| 0.1 | 1.683 % | 0.0250 |
| 0.01 | 1.163 % | 0.0100 |
| 0.001 | 0.744 % | 0.0040 |
| 0.0001 | 0.568 % | 0.0032 |
| 0.00001 | 0.451 % | 0.0025 |
| 0.000001 | 0.723 % | 0.0040 |
| 0.0000001 | 0.578 % | 0.0032 |
| 0.00000001 | 0.462 % | 0.0026 |
| 0.000000001 | 0.740 % | 0.0041 |
| 0.0000000001 | 0.592 % | 0.0033 |
| 0.00000000001 | 0.473 % | 0.0026 |
Иллюстрация решения данного дифференциального уравнения в виде графика – приведена в Приложении 2 .
5.2.Решение системы дифференциальных уравненийВторым этапом анализа достоверности полученных результатов была проверка правильности решения системы линейных дифференциальных уравнений с аналитическим решением .
Рассмотрим следующую систему дифференциальных уравнений , которую требуется решить методом Адамса-Башфорта :
Начальными условиями здесь являются :
![]() . Возьмем начальный шаг интегрирования h=0.00001 ,
время интегрирования по трех точечному методу прогноза и коррекции tp=0.1 и время интегрирования по методу Адамса-Башфорта
ta=1 .
. Возьмем начальный шаг интегрирования h=0.00001 ,
время интегрирования по трех точечному методу прогноза и коррекции tp=0.1 и время интегрирования по методу Адамса-Башфорта
ta=1 .
Результаты исследования для разных начальных шагов интегрирования приведены в таблице 2 . Мы приходим к выводу , что точность решения одного уравнения и системы дифференциальных уравнений совпадают .
Иллюстрация решения данной системы дифференциальных уравнений приведены в виде графика в приложении 3 .
ЗАКЛЮЧЕНИЕВ данной курсовой научно-исследовательской работе разработан алгоритм и программа решения систем линейных дифференциальных уравнений первого порядка пяти точечным методом прогноза и коррекции Адамса-Башфорта .
Проведены тестовые расчеты , подтвердившие высокую эффективность и точность метода Адамса-Башфорта со стартованием трех точечным методом прогноза и коррекции с переменным шагом .
Проведены ряд исследований решения систем как с постоянным шагом , так и с переменным шагом на сходимость к постоянному шагу .
Во всех случаях получены результаты высокой точности .
Список литературы1.Дж.Ортега , У.Пул “Введение в численные методы решения дифференциальных уравнений ”. Пер.с англ.; под редакцией А.А.Абрамова - М.;Наука.Гл.ред.физ.мат.лит.1986.-288с.
2.Р.В.Хемминг “Численные методы для научных работников инженеров ”: Пер с англ.:Под редакцией Р.С.Гутера.- Гл.ред.физ.мат.лит.1968.-203 с.
Т.Шуп.”Решение инженерных задач наЭВМ. Практическое пособие “
Пер.с англ.-М.Мир.1982.-238с.
Приложение 1 :Блок схема Алгоритма
![]()
![]()
![]()
![]() -
-
![]()
![]() +
+
 |
![]()
![]()
![]()
| H:=h*N |
![]()
| H:=h/N |
 |
Приложение 2:
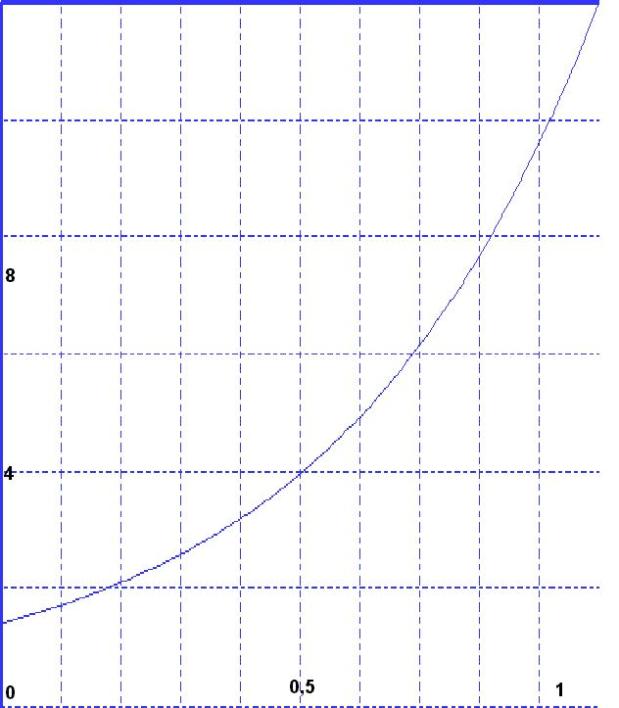
Решение одного дифференциального уравнения
Приложение 3 :
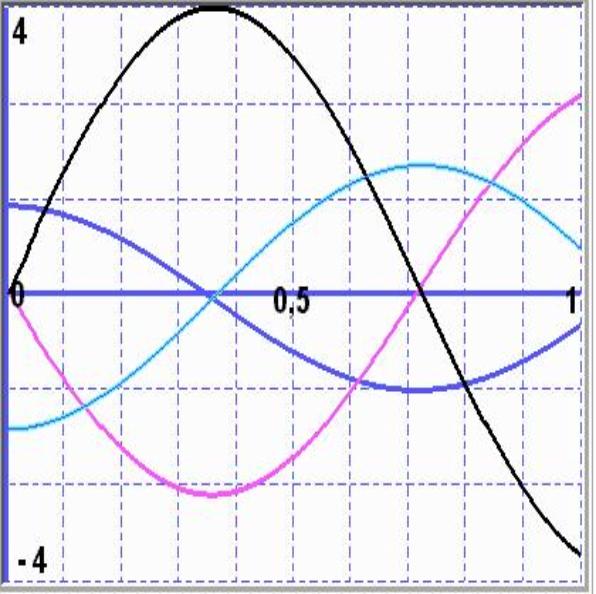
Решение системы линейных дифференциальных уравнений
![]()
![]() 1-ое уравнение 2 –ое уравнение
1-ое уравнение 2 –ое уравнение
3 – е уравнение 4 –ое уравнение
Приложение 4 : Тексты программ
{
++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
| PrandCoM version 2.41 Copiright ( c ) 2001 |
| Программа разработана студентом |
| Национального Технического Университета |
| " Харьковский Политехнический Институ " |
| группы И - 29 |
| Кафедры Автоматического Управления Движением |
| ( Системы и процессы управления ) |
| Ухановым Е.В. |
| NetMail ( FidoNet ) 2:461/212.21 |
| E-Mail : JVUMailbox@rambler.ru |
| |
| Программа разработана на основе объектной библиотеки VFH version 4.XX |
++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
}
{$M 10000,0,0}
(****************************************************************************)
(****** Дата последней разработки : 05.05.2001 **********************)
(****************************************************************************)
Program Prognoz_and_Correction_Modification;
(****************************************************************************)
Uses PACM;
(****************************************************************************)
var
TPC : TApplPandC;
(****************************************************************************)
(******************************) begin (*************************************)
TPC.Application;
TPC.Done;
(*******************************) end. (*************************************)
(****************************************************************************)
{
++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
| Версия 2.XX |
| Программа разработана студентом Национального Технического |
| Университета " Харьковский Политехнический Институ " группы И - 29 |
| Кафедры Автоматического Управления Движением - Ухановым Е.В. |
| NetMail ( FidoNet ) 2:461/212.21 |
| E-Mail : jvumailbox@rambler.ru |
| |
| Программа разработана на основе объектной библиотеки VFH version 4.XX |
++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
}
(****************************************************************************)
(**** Дата последней разработки модуля : 15.04.2001 *****************)
(****************************************************************************)
(****************************************************************************)
(*******************************) Unit PACM; (*******************************)
(****************************************************************************)
(*******************************) INTERFACE (********************************)
(****************************************************************************)
Uses FormObj,MouseObj,PACMEr,PACMMenu,PACMBtn,PACMPnl,PACMPC,PACMCnst;
(****************************************************************************)
type
TApplPandC = object ( TForm )
Function MouseHandler : boolean;Virtual;
Procedure FormCreate;Virtual;
Procedure Application;
end;
(****************************************************************************)
(******************************) IMPLEMENTATION (****************************)
(****************************************************************************)
Procedure TApplPandC.FormCreate;
var
Pnl : TPanel;
Pnl1 : TPanel;
TMenu1 : TCreateMenus;
begin
Pnl.Init(548,35,619,50,1,7,1,1,1,1,false,false);
Pnl.Panel;
Pnl1.Init(470,407,630,460,1,7,1,0,1,4,true,false);
Pnl1.Panel;
TPnl1.ToolBarCreate;
TPnl1.PanelCreate;
TPageControl1.PageControlCreater;
TBitBtns.BitBtnCreaters;
TMenu1.MenusCreate;
end;
(********************************)
Function TApplPandC.MouseHandler;
var
TMouse1 : TMouse;
b,x,y : word;
TMenu1 : TCreateMenus;
TSubMenu1 : TCreateMenus;
ST1 : TSystemTime;
begin
MouseHandler:=false;
TMouse1.GetMouseState(b,x,y);
ST1.Init(549,36,618,49,1,15);
ST1.SystemTime;
TBitBtns.BitBtnHandlers(b,x,y);
MouseHandler:=fExitBtn;
TMenu1.MenusVisible(x,y);
TMenu1.MenusHandlers(b,x,y);
TPageControl1.PageControlHandlers(b,x,y);
end;
Procedure TApplPandC.Application;
var
TIEr : TInitErrors;
begin
TIEr.FatalErrorVFH;
TIEr.LoadFont('km_defj8.fnt');
TIEr.FindImEr1('x.bi');
InitObjGraph;
if InitMouseJVU then
begin
TIEr.LfLoad('Lf.sys');
TIEr.ErrorExec('x.bi');
TIEr.FindFile('f1.dat');
TIEr.FindFile('f2.dat');
TIEr.FindFile('f3.dat');
TIEr.FindFile('f4.dat');
TIEr.FindFile('km_defj8.fnt');
TIEr.FindFile('f_nfrj8.fnt');
TIEr.FindFile('t_nfrj8.fnt');
TIEr.FindFile('asdf.bi');
TIEr.FindFile('pacm_n1.bi');
TIEr.FindFile('pacm_n2.bi');
TIEr.FindFile('pacm_n3.bi');
TIEr.FindFile('pacm_n4.bi');
TIEr.FindFile('PrandCoM.hlp');
TIEr.FindFile('litj.chr');
TIEr.FindFile('scri.chr');
TIEr.FindFile('trip.chr');
TIEr.FindFile('tscr.chr');
TIEr.FindFile('initm.mtr');
TIEr.FindFile('initnu.mtr');
if not fQuickHalt then
begin
TIEr.LoadCFG('PrandCom.cfg');
With HT do
begin
hx1:=575;
hy1:=20;
hx2:=637;
hy2:=34;
hc:=true;
hs:='Закрыть';
end;
Init(1,1,639,479,7,1,'Prognoz & Corrections Modifications');
Form;
end;
end
else
begin
TIEr.ErrorVFH;
end;
end;
(****************************************************************************)
(***********************************) END. (*********************************)
(****************************************************************************)
Похожие работы
... , является важнейшей вспомогательной научно-технической задачей . Целью данной курсовой работы является разработка алгоритма решения систем линейных дифференциальных уравнений первого порядка пяти точечным методом прогноза и коррекции Адамса-Башфорта . 1. ПОСТАНОВКА ЗАДАЧИ Рассмотрим произвольную систему линейных дифференциальных уравнений первого порядка : ...
0 комментариев