Навигация
РЕШЕНИЕ СИСТЕМ ЛИНЕЙНЫХ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ ПЯТИТОЧЕЧНЫМ МЕТОДОМ АДАМСА – БАШФОРТА
23511
знаков
3
таблицы
14
изображений
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ УКРАИНЫ
НАЦИОНАЛЬНЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ “ ХАРЬКОВСКИЙ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ” Кафедра “Системы и Процессы Управления”
ОТЧЕТ
о научно-исследовательской курсовой работе
по численным методам
на тему :
« РЕШЕНИЕ СИСТЕМ ЛИНЕЙНЫХ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ ПЯТИТОЧЕЧНЫМ МЕТОДОМ АДАМСА – БАШФОРТА »
Выполнил студент
гр.И-29 Уханов Е.В.
Руководитель работы
Д.т.н. проф Бреславский Д.В.
Харьков 2001
СОДЕРЖАНИЕ
Введение………………………………………………………………………..3
1. Постановка задачи …………………………………………………………4
2. Методы решения………………..…………………………………………6
2.1. Метод прогноза и коррекции …………………………………………6
2.2 Модифицированный метод Гаусса ………………………………….12
3. Описание алгоритма ………………………………………………………14
4. Описание программы ……………………………………………………..15
5. Примеры расчетов ………………………………………………………...17
5.1. Решение одного дифференциального уравнения …………………...17
5.2. Решение системы дифференциальных уравнений ………………….19
Заключение ……………………………………………………………………20
Список использованной литературы ………………………………………..21
Приложение 1 …………………………………………………………………22
Приложение 2 …………………………………………………………………23
Приложение 3 …………………………………………………………………24
Приложение 4 …………………………………………………………………25
ВВЕДЕНИЕ
Во многих областях науки и техники , а также отраслях наукоемкой промышленности , таких как : авиационная , космическая , химическая , энергетическая , - являются весьма распространенные задачи прогноза протекания процессов , с дальнейшей их коррекцией .
Решение такого рода задач связано с необходимостью использования численных методов , таких как : метод прогноза и коррекции , метод Адамса-Башфорта , метод Эйлера , метод Рунге-Кута , и др. При этом , стоит задача решения системы линейных дифференциальных уравнений первого порядка одним из методов интегрирования , на произвольном промежутке времени . Одним из оптимальных методов дающих высокую точность результатов – является пяти точечный метод прогноза и коррекции Адамса-Башфорта . Для повышения точности метода используется трех точечный метод прогноза и коррекции с автоматическим выбором шага , что приводит к универсальному методу интегрирования систем дифференциальных уравнений произвольного вида на любом промежутке интегрирования .
Разработка программных средств реализующих расчет точного прогноза протекания процессов , является важнейшей вспомогательной научно-технической задачей .
Целью данной курсовой работы является разработка алгоритма решения систем линейных дифференциальных уравнений первого порядка пяти точечным методом прогноза и коррекции Адамса-Башфорта .
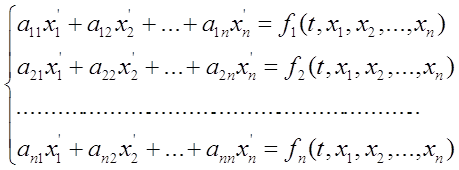
1. ПОСТАНОВКА ЗАДАЧИ
Рассмотрим произвольную систему линейных дифференциальных уравнений первого порядка :
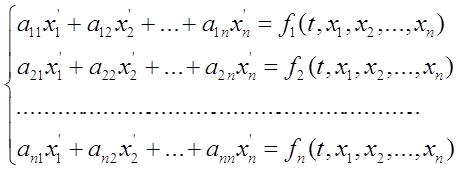 (1.1)
(1.1)
тогда как :
А = 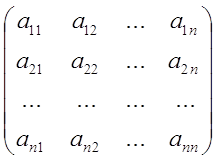 (1.2)
(1.2)
где А заданная матрица размером N x N .
![]() - вектор с N координатами , который подлежит определению ;
- вектор с N координатами , который подлежит определению ;
N – произвольное целое число ;
![]()
- заданные вектора правых частей с N координатами .
С использованием метода прогноза и коррекции Адамса-Башфорта пятого порядка , необходимо получить значения неизвестных для заданных временных интервалов . Для стартования метода необходимо использовать метод прогноза и коррекции третьего порядка с переменным шагом , на заданных временных промежутках ..
2. МЕТОДЫ РЕШЕНИЯ
2.1. Метод прогноза и коррекции
Метод прогноза и коррекции относится к задачам класса Коши , а именно к численным решениям многошаговыми методами .
Рассмотрим задачу Коши :
![]() ,
, ![]() (2.1.1)
(2.1.1)
Подставим в (2.1.1) точное решение y(x) , и проинтегрируем это уравнение на отрезке ![]() , тогда получим :
, тогда получим :
 (2.1.2)
(2.1.2)
где в последнем член предполагаем , что p(x) полином , аппроксимирующий f(x,y(x)) . Чтобы построить этот полином , предположим , что ![]() - приближения к решению в точках
- приближения к решению в точках ![]() . Будем считать для начала , что узлы Xi
расположены равномерно с шагом h . тогда fi = f(xi,yi), ( i=k,k-1,k-2,…,k-N) есть приближения к f (x,y(x)) в точках
. Будем считать для начала , что узлы Xi
расположены равномерно с шагом h . тогда fi = f(xi,yi), ( i=k,k-1,k-2,…,k-N) есть приближения к f (x,y(x)) в точках ![]() и мы в качестве P возьмем интерполяционный полином для выбора данных (xi,fi) ,
и мы в качестве P возьмем интерполяционный полином для выбора данных (xi,fi) ,
( i =k,k-1,k-2,…,k-N) . Таким образом , P – полином степени N , удовлетворяющий условиям P(xi)=fi , ( i = k,k-1,k-2,…,k-N) . В принципе , можем проинтегрировать этот полином явно , что ведет к следующему методу :
 (2.1.3)
(2.1.3)
В простейшем случае , когда N=0 , полином P есть константа , равная fk , и (2.1.3) превращается в обычный метод Эйлера :
![]() (2.1.4)
(2.1.4)
Если N=1 , то P есть линейная функция , проходящая через точки
(xk-1,fk-1) и (xk,fk) , т.е.
 (2.1.5)
(2.1.5)
интегрируя этот полином от Xk до Xk+1 , получим следующий метод :
 (2.1.6)
(2.1.6)
который является двухшаговым , поскольку использует информацию в двух точках xk и xk-1 . Аналогично , если N=2 , то P - есть кубический интерполяционный полином , а соответствующий метод определяется формулой :
 (2.1.7)
(2.1.7)
Отметим , что метод (2.1.6) – есть метод Адамса-Башфорта второго порядка , (2.1.7) – метод Адамса-Башфорта четвертого порядка .
Для стартования метода (2.1.7) необходимы сведения о четырех предыдущих точках . Соответственно данный метод требует вычисления стартующих данных . Воспользуемся для нахождения второй точки одношаговым методом Эйлера , который имеет вид :
![]()
Таким образом , подставляя начальные условия, мы находим вторую точку . Следует заметить , что степень точности совпадает со степенью точности остальных методов , что является существенным фактором в стартовании метода прогноза и коррекции .
Ввиду того , что стартовые методы имеют более низкий порядок , в начале приходится считать с меньшим шагом и с использованием большего промежутка времени . В данном случае метод Эйлера для дальнейшего интегрирования не оправдывает себя . Для этих целей воспользуемся трехшаговым методом прогноза и коррекции с переменным шагом .
Рассуждая также , как для метода Адамса-Башфорта , который излагается в работах : [1],[2],[3] , мы мы приходим к формулам :
Прогноз :
![]() (2.1.8)
(2.1.8)
Коррекция :
 (2.1.9)
(2.1.9)
где h - шаг интегрирования , изменяющийся на малом промежутке времени в соответствии с условиями Рунге :
 ,
,
где в свою очередь ![]() - малое конкретное значение , при невыполнении условия которого увеличивается шаг h=h*N а
- малое конкретное значение , при невыполнении условия которого увеличивается шаг h=h*N а ![]() - малое конкретное значение , при невыполнении условия шаг соответственно уменьшается h=h/N , где N - некоторое целое число больше единицы .
- малое конкретное значение , при невыполнении условия шаг соответственно уменьшается h=h/N , где N - некоторое целое число больше единицы .
Оптимально , для вычисления новой точки , с помощью метода прогноза и коррекции , используется формула :
 (2.1.10)
(2.1.10)
Таким образом, мы воспользовались простым трех шаговым методом прогноза и коррекции , для стартования метода Адамса-Башфорта . Преимущества данного метода заключаются :в его высокой точности , авто подборе шага , что во много раз повышает точность самого метода Адамса-Башфорта , и делает его оптимальным для задач такого рода .
Метод Адамса-Башфорта использует уже посчитанные значения в точке Xk и в предыдущих точках . В принципе , при построении интерполяционного полинома , мы можем использовать и точки Xk+1,Xk+2,… . Простейший случай при этом состаит в использовании точек Xk+1,Xk,…,Xk-N
и построения интерполяционного полинома степени N+1 , удовлетворяющего условиям P(Xi)=fi , (I=k+1,k,…,k-N) . При этом возникает класс методов , известных как методы Адамса-Моултона . Если N=0 , то p – линейная функция , проходящая через точки (Xk,fk) и (Xk+1,f k+1) , и соответствующий метод :
 (2.1.11)
(2.1.11)
является методом Адаиса-Моултона
[2] , именно им мы воспользовались в формуле (2.1.9) – коррекции спрогнозированной точки в трех шаговом методе . Если N=2 , то p – кубический полином , построенный по точкам ![]() и соответствующий метод :
и соответствующий метод :
 (2.1.12)
(2.1.12)
является методом Адамса-Моултона четвертого порядка . В силу того , что по сути fk+1 – неизвестная , то методы Адамса-Моултона (2.1.11),(2.1.12) называют неявными . В тоже время методы Адамса-Башфорта – называют явными .
Теперь воспользовавшись явной формулой (2.1.7) , и неявной формулой (2.1.12) , используя их совместно , мы приходим к методу Адамса-Башфорта четвертого порядка :
 (2.1.13)
(2.1.13)
![]()

Стоит обратить внимание , что в целом этод метод является явным . Сначало по формуле Адамса-Башфорта вычисляется значение![]() , являющееся “прогнозом” . Затем
, являющееся “прогнозом” . Затем ![]() используется для вычисления приближенного значения
используется для вычисления приближенного значения ![]() , которое в свою очередь используется в формуле Адамса-Моултона . Таким образом формула Адамса-Моултона “корректирует” корректирует приближение , называемое формулой Адамса-Башфорта .
, которое в свою очередь используется в формуле Адамса-Моултона . Таким образом формула Адамса-Моултона “корректирует” корректирует приближение , называемое формулой Адамса-Башфорта .
Теперь рассмотрим произвольную систему линейных дифференциальных уравнений первого порядка :
где
A =
Заданная матрица размером NxN ; ![]() - вектор с N координатами , который подлежит определению . В связи с тем , что связь между искомыми неизвестными
определяется матрицей коэффициентов A , на каждом шаге по времени , необходимо решить систему относительно неизвестных скоростей , для её решения воспользуемся модифицированным методом Гаусса , который описан в разделе 2.2 .
- вектор с N координатами , который подлежит определению . В связи с тем , что связь между искомыми неизвестными
определяется матрицей коэффициентов A , на каждом шаге по времени , необходимо решить систему относительно неизвестных скоростей , для её решения воспользуемся модифицированным методом Гаусса , который описан в разделе 2.2 .
Далее, интегрируя сначала ранее описанными методами : методом Эйлера на первом шаге , трех точечным методом прогноза и коррекции с авто подбором шага , на малом промежутке времени и с малым начальным шагом , для повышения точности стартующих методов на оставшемся промежутке времени производим интегрирование с постоянным шагом – пяти точечным методом прогноза и коррекции Адамса-Башфорта (2.1.13) , [2] , [3] .
Похожие работы
... шаг интегрирования ; tp – время интегрирования трех точечным методом прогноза и коррекции , ta – время интегрирования по методу Адамса-Башфорта , NU – массив начальных условий . Данная процедура способна производить решения систем линейных дифференциальных уравнений произвольного размера , на произвольном промежутке времени интегрирования . Вычисленные данные записываются в файлы prandcom*.df . ...
0 комментариев