Навигация
МЕТОДЫ КОМПАКТНОГО ХРАНЕНИЯ МАТРИЦЫ ЖЕСТКОСТИ
42868
знаков
2
таблицы
6
изображений
2 МЕТОДЫ КОМПАКТНОГО ХРАНЕНИЯ МАТРИЦЫ ЖЕСТКОСТИ
Матрица жесткости, получающаяся при применении МКЭ, обладает симметричной структурой, что позволяет в общем случае хранить только верхнюю треугольную часть матрицы. Однако для задач с большим количеством неизвестных это так же приводит к проблеме нехватки памяти. Предлагаемый в данной работе метод, позволяет хранить только ненулевые члены матрицы жесткости. Суть его заключается в следующем.
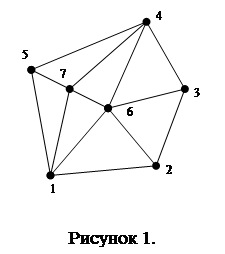
Первоначально, с целью выявления связей каждого узла с другими, производится анализ структуры дискретизации области на КЭ. Например, для КЭ - сетки, изображенной на рис. 1, соответствующая структура связей будет иметь вид:
| № узла | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| Связи | 1, 2, 5, 6, 7 | 1, 2, 3, 6 | 2, 3, 4, 6 | 3, 4, 5, 6, 7 | 1, 4, 5, 7 | 1, 2, 3, 4, 6, 7 | 1, 4, 5, 6, 7 |
 |
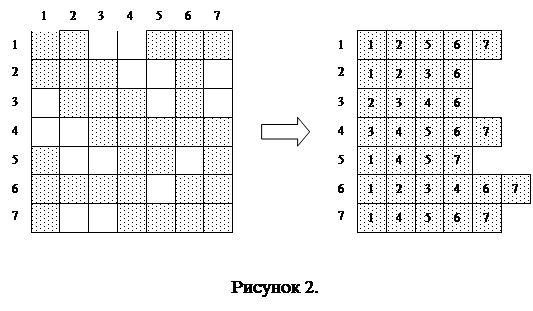
Тогда, для хранения матрицы жесткости необходимо построчно запоминать информацию о коэффициентах, соответствующих узлам, с которыми связан данный узел. На рис. 2 приведены матрица жесткости и ее компактное представление для сетки изображенной на рис 1 [9].
Текст подпрограммы, реализующий предложенный алгоритм анализа структуры КЭ-разбиения тела, приведен в Приложении 1.
Данный способ компактного хранения матрицы жесткости позволяет легко его использовать совместно с каким-нибудь численным методом. Наиболее удобным для этой цели представляется использование вышеизложенного итерационного метода Ланцоша, так как на каждой итерации требуется только перемножать матрицу коэффициентов СЛАУ и заданный вектор. Следовательно, для использования предложенного метода компактного хранения СЛАУ необходимо построить прямое и обратное преобразование в первоначальную квадратную матрицу.
Пусть ![]() – элемент первоначальной квадратной матрицы размерностью
– элемент первоначальной квадратной матрицы размерностью ![]() , а
, а ![]() - ее компактное представление. Тогда для обратного преобразования будут справедливы следующие соотношения:
- ее компактное представление. Тогда для обратного преобразования будут справедливы следующие соотношения:
 , (*)
, (*)
где m – количество степеней свободы (m=1,2,3).
Для прямого преобразования будут справедливы соотношения, обратные к соотношениям (*).
3 ЧИСЛЕННЫЕ ЭКСПЕРИМЕНТЫ
Для проверки предлагаемого метода компактного хранения матрицы жесткости была решена задача о контактном взаимодействии оболочечной конструкции и ложемента [12] (рис. 4).
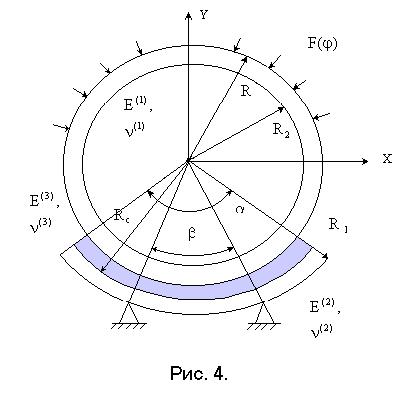 |
Данная задача часто возникает на практике при транспортировке или хранении с горизонтальным расположением оси оболочечные конструкции устанавливаются на круговые опоры - ложементы. Взаимодействие подкрепленных оболочечных конструкций и ложементов осуществляется через опорные шпангоуты, протяженность которых вдоль оси оболочки соизмерима с шириной ложементов и много меньше радиуса оболочки и величины зоны контакта.
Данная задача решалась методом конечных элементов при помощи системы FORL [5]. Дискретная модель ложемента (в трехмерной постановке) представлена на Рис. 5.
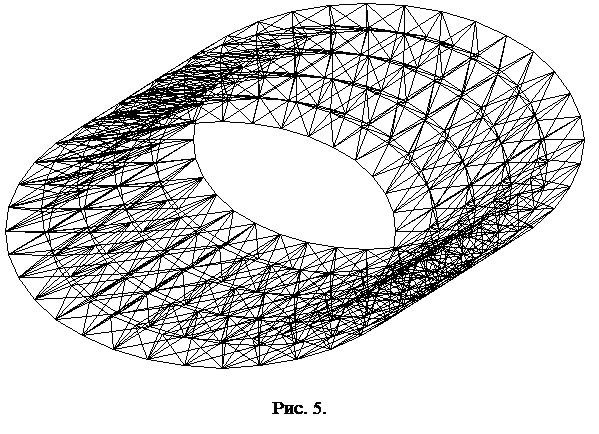
При построении данной КЭ-модели было использовано 880 узлов и 2016 КЭ в форме тетраэдра. Полный размер матрицы жесткости для такой задачи составляет ![]() байт, что приблизительно равно 2,7 Мбайт оперативной памяти. Размер упакованного представления составил около 315 Кбайт.
байт, что приблизительно равно 2,7 Мбайт оперативной памяти. Размер упакованного представления составил около 315 Кбайт.
Данная задача решалась на ЭВМ с процессором Pentium 166 и 32 МБ ОЗУ двумя способами – методом Гаусса и методом Ланцоша. Сопоставление результатов решения приведено в Таблице 1.
Таблица 1.
| Время решения (сек) |
|
|
|
|
|
| |
| Метод Гаусса | 280 | 2.2101 | -2.4608 | 1.3756 | -5.2501 | 1.7406 | -2.3489 |
| Метод Ланцоша | 150 | 2.2137 | -2.4669 | 1.3904 | -5.2572 | 1.7433 | -2.3883 |
Из Таблицы 1 легко видеть, что результаты решения СЛАУ методом Гаусса и методом Ланцоша хорошо согласуются между собой, при этом время решения вторым способом почти в два раза меньше, чем в случае использования метода Гаусса.
ВЫВОДЫ.
В данной работе были рассмотрены способы компактного хранения матрицы коэффициентов системы линейных алгебраических уравнений (СЛАУ) и методы ее решения. Разработан алгоритм компактного хранения матрицы жесткости, позволяющий в несколько раз (иногда более чем в десятки раз) сократить объем требуемой памяти для хранения такой матрицы жесткости.
Классические методы хранения, учитывающие симметричную и ленточную структуру матриц жесткости, возникающих при применении метода конечных элементов (МКЭ), как правило, не применимы при решении контактных задач, так как при их решении матрицы жесткости нескольких тел объединяются в одну общую матрицу, ширина ленты которой может стремиться к порядку системы.
Предложенная в работе методика компактного хранения матриц коэффициентов СЛАУ и использования метода Ланцоша позволили на примере решения контактных задач добиться существенной экономии процессорного времени и затрат оперативной памяти.
ПРИЛОЖЕНИЕ 1
Исходный текст программы, реализующий анализ структуры КЭ-разбиения объекта.
#include <math.h>
#include <stdio.h>
#include <string.h>
#include <stdlib.h>
#include <fstream.h>
#include "matrix.h"
#define BASE3D_4 4
#define BASE3D_8 8
#define BASE3D_10 10
const double Eps = 1.0E-10;
DWORD CurrentType = BASE3D_10;
void PrintHeader(void)
{
printf("Command format: AConvert -<switch> <file1.in> <file2.in> <file3.out> [/Options]\n");
printf("Switch: -t10 - Tetraedr(10)\n");
printf(" -c8 - Cube(8)\n");
printf(" -s4 - Shell(4)\n");
printf(" -s8 - Shell(8)\n\n");
printf("Optins: /8 - convert Tetraedr(10)->8*Tetraedr(4)\n");
printf(" /6 - convert Cube(8)->6*Tetraedr(4)\n");
}
bool Output(char* fname,Vector<double>& x,Vector<double>& y,Vector<double>& z, Matrix<DWORD>& tr, DWORD n,
DWORD NumNewPoints,DWORD ntr,Matrix<DWORD>& Bounds,DWORD CountBn)
{
char* Label = "NTRout";
int type = CurrentType,
type1 = (type==BASE3D_4 || type==BASE3D_10) ? 3 : 4;
DWORD NewSize,
i,
j;
ofstream Out;
if (type==BASE3D_4) type1 = 3;
else if (type==BASE3D_8) type1 = 4;
else if (type==BASE3D_10) type1 = 6;
Out.open(fname,ios::out | ios:: binary);
if (Out.bad()) return true;
Out.write((const char*)Label,6 * sizeof(char));
if (Out.fail()) return true;
Out.write((const char*)&type,sizeof(int));
if (Out.fail()) return true;
Out.write((const char*)&CountBn,sizeof(DWORD));
if (Out.fail())
{
Out.close();
return true;
}
Out.write((const char*)&(NewSize = n + NumNewPoints),sizeof(DWORD));
if (Out.fail()) return true;
Out.write((const char*)&(NumNewPoints),sizeof(DWORD));
if (Out.fail())
{
Out.close();
return true;
}
for (DWORD i = 0; i < n; i++)
{
Out.write((const char*)&x[i],sizeof(double));
Out.write((const char*)&y[i],sizeof(double));
Out.write((const char*)&z[i],sizeof(double));
if (Out.fail())
{
Out.close();
return true;
}
}
for (i = 0; i < NumNewPoints; i++)
{
Out.write((const char*)&x[n + i],sizeof(double));
Out.write((const char*)&y[n + i],sizeof(double));
if (Out.fail())
{
Out.close();
return true;
}
}
Out.write((const char*)&(ntr),sizeof(DWORD));
if (Out.fail())
{
Out.close();
return true;
}
for (i = 0; i < ntr; i++)
for (j = 0; j < (DWORD)type; j++)
{
DWORD out = tr[i][j];
Out.write((const char*)&out,sizeof(DWORD));
if (Out.fail())
{
Out.close();
return true;
}
}
for (i = 0; i < CountBn; i++)
for (j = 0; j < (DWORD)type1; j++)
{
DWORD out = Bounds[i][j];
Out.write((const char*)&out,sizeof(DWORD));
if (Out.fail())
{
Out.close();
return true;
}
}
{
//*********************
// Create Links
printf("Create links...\r");
Vector<DWORD> Link(n),
Size(n);
Matrix<DWORD> Links(n,n);
DWORD Count;
int type = CurrentType;
for (DWORD i = 0; i < n; i++)
{
for (DWORD j = 0; j < ntr; j++)
for (DWORD k = 0; k < (DWORD)type; k++)
if (tr[j][k] == i)
for (DWORD m = 0; m < (DWORD)type; m++) Link[tr[j][m]] = 1;
Count = 0;
for (DWORD m = 0; m < n; m++)
if (Link[m]) Count++;
Size[i] = Count;
Count = 0;
for (DWORD m = 0; m < n; m++)
if (Link[m])
Links[i][Count++] = m;
//Set zero
Link.ReSize(n);
}
// Output
//*********************
for (DWORD i = 0; i < n; i++)
{
DWORD Sz = Size[i];
Out.write((const char*)&Sz,sizeof(DWORD));
for (DWORD j = 0; j < Sz; j++)
Out.write((const char*)&(Links[i][j]),sizeof(DWORD));
}
//*********************
}
printf(" \r");
printf("Points: %ld\n",n);
printf("FE: %ld\n",ntr);
Out.close();
return false;
}
bool Test(DWORD* a,DWORD* b)
{
bool result;
int NumPoints = 3;
if (CurrentType == BASE3D_8) NumPoints = 4;
else if (CurrentType == BASE3D_10) NumPoints = 6;
for (int i = 0; i < NumPoints; i++)
{
result = false;
for (int j = 0; j < NumPoints; j++)
if (b[j] == a[i])
{
result = true;
break;
}
if (result == false) return false;
}
return true;
}
void Convert(Vector<double>& X,Vector<double>& Y,Vector<double>& Z, Matrix<DWORD>& FE,DWORD NumTr,Matrix<DWORD>& Bounds,DWORD& BnCount)
{
int cData8[6][5] = {{0,4,5,1,7},
{6,2,3,7,0},
{4,6,7,5,0},
{2,0,1,3,5},
{1,5,7,3,4},
{6,4,0,2,1}},
cData4[4][4] = {{0,1,2,3},
{1,3,2,0},
{3,0,2,1},
{0,3,1,2}},
cData10[4][7] = {{0,1,2,4,5,6,3},
{0,1,3,4,8,7,2},
{1,3,2,8,9,5,0},
{0,2,3,6,9,7,1}},
cData[6][7],
Data[6],
l,
Num1,
Num2,
m;
DWORD i,
j,
p[6],
pp[6],
Index;
Matrix<DWORD> BoundList(4 * NumTr,6);
double cx,
cy,
cz,
x1,
y1,
z1,
x2,
y2,
z2,
x3,
y3,
z3;
Bounds.ReSize(4 * NumTr,6);
switch (CurrentType)
{
case BASE3D_4:
Num1 = 4;
Num2 = 3;
for (l = 0; l < Num1; l++)
for (m = 0; m < Num2+1; m++)
cData[l][m] = cData4[l][m];
break;
case BASE3D_8:
Num1 = 6;
Num2 = 4;
for (l = 0; l < Num1; l++)
for (m = 0; m < Num2 + 1; m++)
cData[l][m] = cData8[l][m];
break;
case BASE3D_10:
Num1 = 4;
Num2 = 6;
for (l = 0; l < Num1; l++)
for (m = 0; m < Num2+1; m++)
cData[l][m] = cData10[l][m];
}
printf("Create bounds...\r");
for (i = 0; i < NumTr - 1; i++)
for (int j = 0; j < Num1; j++)
if (!BoundList[i][j])
{
for (l = 0; l < Num2; l++)
p[l] = FE[i][cData[j][l]];
for (DWORD k = i + 1; k < NumTr; k++)
for (int m = 0; m < Num1; m++)
if (!BoundList[k][m])
{
for (int l = 0; l < Num2; l++)
pp[l] = FE[k][cData[m][l]];
if (Test(p,pp))
BoundList[i][j] = BoundList[k][m] = 1;
}
}
for (i = 0; i < NumTr; i++)
for (j = 0; j < (DWORD)Num1; j++)
if (BoundList[i][j] == 0)
{
if (CurrentType == BASE3D_4)
{
cx = X[FE[i][cData[j][3]]];
cy = Y[FE[i][cData[j][3]]];
cz = Z[FE[i][cData[j][3]]];
}
else
if (CurrentType == BASE3D_10)
{
cx = X[FE[i][cData[j][6]]];
cy = Y[FE[i][cData[j][6]]];
cz = Z[FE[i][cData[j][6]]];
}
else
{
cx = X[FE[i][cData[j][4]]];
cy = Y[FE[i][cData[j][4]]];
cz = Z[FE[i][cData[j][4]]];
}
x1 = X[FE[i][cData[j][0]]];
y1 = Y[FE[i][cData[j][0]]];
z1 = Z[FE[i][cData[j][0]]];
x2 = X[FE[i][cData[j][1]]];
y2 = Y[FE[i][cData[j][1]]];
z2 = Z[FE[i][cData[j][1]]];
x3 = X[FE[i][cData[j][2]]];
y3 = Y[FE[i][cData[j][2]]];
z3 = Z[FE[i][cData[j][2]]];
for (l = 0; l < Num2; l++)
Data[l] = cData[j][l];
if ( ((cx-x1)*(y2-y1)*(z3-z1) + (cy-y1)*(z2-z1)*(x3-x1) + (y3-y1)*(cz-z1)*(x2-x1) -
(x3-x1)*(y2-y1)*(cz-z1) - (y3-y1)*(z2-z1)*(cx-x1) - (cy-y1)*(z3-z1)*(x2-x1)) > 0)
{
if (CurrentType == BASE3D_4)
{
Data[0] = cData[j][0];
Data[1] = cData[j][2];
Data[2] = cData[j][1];
}
else
if (CurrentType == BASE3D_10)
{
Data[0] = cData[j][0];
Data[1] = cData[j][2];
Data[2] = cData[j][1];
Data[3] = cData[j][5];
Data[5] = cData[j][3];
}
else
{
Data[0] = cData[j][0];
Data[1] = cData[j][3];
Data[2] = cData[j][2];
Data[3] = cData[j][1];
}
}
for (l = 0; l < Num2; l++)
Bounds[BnCount][l] = FE[i][Data[l]];
BnCount++;
}
}
void main(int argc,char** argv)
{
char *input1,
*input2,
*input3,
*op = "",
*sw;
bool CreateFile(char*,char*,char*,char*);
printf("ANSYS->FORL file convertor. ZSU(c) 1998.\n\n");
if (argc < 5 || argc > 6)
{
PrintHeader();
return;
}
sw = argv[1];
input1 = argv[2];
input2 = argv[3];
input3 = argv[4];
if (!strcmp(sw,"-t10"))
CurrentType = BASE3D_10;
else
if (!strcmp(sw,"-c8"))
CurrentType = BASE3D_8;
else
{
printf("Unknown switch %s\n\n",sw);
PrintHeader();
return;
}
if (argc == 6)
{
op = argv[5];
if (strcmp(op,"/8") && strcmp(op,"/6"))
{
printf("Unknown options %s\n\n",op);
PrintHeader();
return;
}
}
if (CreateFile(input1,input2,input3,op))
printf("OK\n");
}
bool CreateFile(char* fn1,char* fn2,char* fn3,char* Op)
{
FILE *in1,
*in2,
*in3;
Vector<double> X(1000),
Y(1000),
Z(1000);
DWORD NumPoints,
NumFE,
NumBounds = 0,
tmp;
Matrix<DWORD> FE(1000,10),
Bounds;
bool ReadTetraedrData(char*,char*,FILE*,FILE*,Vector<double>&,Vector<double>&,Vector<double>&,
Matrix<DWORD>&,DWORD&,DWORD&),
ReadCubeData(char*,char*,FILE*,FILE*,Vector<double>&,Vector<double>&,Vector<double>&,
Matrix<DWORD>&,DWORD&,DWORD&);
void Convert824(Matrix<DWORD>&,DWORD&),
Convert1024(Matrix<DWORD>&,DWORD&);
if ((in1 = fopen(fn1,"r")) == NULL)
{
printf("Unable open file %s",fn1);
return false;
}
if ((in2 = fopen(fn2,"r")) == NULL)
{
printf("Unable open file %s",fn2);
return false;
}
if (CurrentType == BASE3D_10)
{
if (!ReadTetraedrData(fn1,fn2,in1,in2,X,Y,Z,FE,NumPoints,NumFE)) return false;
if (!strcmp(Op,"/8"))
{
// Create 8*Tetraedr(4)
Convert1024(FE,NumFE);
}
Convert(X,Y,Z,FE,NumFE,Bounds,NumBounds);
return !Output(fn3,X,Y,Z,FE,NumPoints,0,NumFE,Bounds,NumBounds);
}
if (CurrentType == BASE3D_8)
{
if (!ReadCubeData(fn1,fn2,in1,in2,X,Y,Z,FE,NumPoints,NumFE)) return false;
if (!strcmp(Op,"/6"))
{
// Create 6*Tetraedr(4)
Convert824(FE,NumFE);
}
Convert(X,Y,Z,FE,NumFE,Bounds,NumBounds);
return !Output(fn3,X,Y,Z,FE,NumPoints,0,NumFE,Bounds,NumBounds);
}
return false;
}
void Convert824(Matrix<DWORD>& FE,DWORD& NumFE)
{
Matrix<DWORD> nFE(6 * NumFE,4);
DWORD data[][4] = {
{ 0,2,3,6 },
{ 4,5,1,7 },
{ 0,4,1,3 },
{ 6,7,3,4 },
{ 1,3,7,4 },
{ 0,4,6,3 }
},
Current = 0;
for (DWORD i = 0; i < NumFE; i++)
for (DWORD j = 0; j < 6; j++)
{
for (DWORD k = 0; k < 4; k++)
nFE[Current][k] = FE[i][data[j][k]];
Current++;
}
CurrentType = BASE3D_4;
NumFE = Current;
FE = nFE;
}
void Convert1024(Matrix<DWORD>& FE,DWORD& NumFE)
{
Matrix<DWORD> nFE(8 * NumFE,4);
DWORD data[][4] = {
{ 3,7,8,9 },
{ 0,4,7,6 },
{ 2,5,9,6 },
{ 7,9,8,6 },
{ 4,8,5,1 },
{ 4,5,8,6 },
{ 7,8,4,6 },
{ 8,9,5,6 }
},
Current = 0;
for (DWORD i = 0; i < NumFE; i++)
for (DWORD j = 0; j < 8; j++)
{
for (DWORD k = 0; k < 4; k++)
nFE[Current][k] = FE[i][data[j][k]];
Current++;
}
CurrentType = BASE3D_4;
NumFE = Current;
FE = nFE;
}
bool ReadTetraedrData(char* fn1,char* fn2,FILE* in1,FILE* in2,Vector<double>& X,Vector<double>& Y,Vector<double>& Z,
Matrix<DWORD>& FE,DWORD& NumPoints,DWORD& NumFE)
{
double tx,
ty,
tz;
char TextBuffer[1001];
DWORD Current = 0L,
tmp;
while (!feof(in1))
{
if (fgets(TextBuffer,1000,in1) == NULL)
{
if (feof(in1)) break;
printf("Unable read file %s",fn1);
fclose(in1);
fclose(in2);
return false;
}
if (sscanf(TextBuffer,"%ld %lf %lf %lf", &NumPoints,&tx,&ty,&tz) != 4) continue;
X[Current] = tx;
Y[Current] = ty;
Z[Current] = tz;
if (++Current == 999)
{
Vector<double> t1 = X,
t2 = Y,
t3 = Z;
X.ReSize(2 * X.Size());
Y.ReSize(2 * X.Size());
Z.ReSize(2 * X.Size());
for (DWORD i = 0; i < Current; i++)
{
X[i] = t1[i];
Y[i] = t2[i];
Z[i] = t3[i];
}
}
if (Current % 100 == 0)
printf("Line: %ld\r",Current);
}
fclose(in1);
printf(" \r");
NumPoints = Current;
Current = 0L;
while (!feof(in2))
{
if (fgets(TextBuffer,1000,in2) == NULL)
{
if (feof(in2)) break;
printf("Unable read file %s",fn2);
fclose(in2);
return false;
}
if (sscanf(TextBuffer,"%d %d %d %d %d %ld %ld %ld %ld %ld %ld %ld %ld",
&tmp,&tmp,&tmp,&tmp,&tmp,
&FE[Current][0],&FE[Current][1],&FE[Current][2],&FE[Current][3],
&FE[Current][4],&FE[Current][5],&FE[Current][6],&FE[Current][7]) != 13) continue;
if (fgets(TextBuffer,1000,in2) == NULL)
{
printf("Unable read file %s",fn2);
fclose(in2);
return false;
}
if (sscanf(TextBuffer,"%ld %ld",&FE[Current][8],&FE[Current][9]) != 2)
{
printf("Unable read file %s",fn2);
fclose(in2);
return false;
}
{
if (fabs((tx = 0.5*(X[FE[Current][0] - 1] + X[FE[Current][1] - 1])) - X[FE[Current][4] - 1]) > Eps)
X[FE[Current][4] - 1] = tx;
if (fabs((ty = 0.5*(Y[FE[Current][0] - 1] + Y[FE[Current][1] - 1])) - Y[FE[Current][4] - 1]) > Eps)
Y[FE[Current][4] - 1] = ty;
if (fabs((tz = 0.5*(Z[FE[Current][0] - 1] + Z[FE[Current][1] - 1])) - Z[FE[Current][4] - 1]) > Eps)
Z[FE[Current][4] - 1] = tz;
if (fabs((tx = 0.5*(X[FE[Current][2] - 1] + X[FE[Current][1] - 1])) - X[FE[Current][5] - 1]) > Eps)
X[FE[Current][5] - 1] = tx;
if (fabs((ty = 0.5*(Y[FE[Current][2] - 1] + Y[FE[Current][1] - 1])) - Y[FE[Current][5] - 1]) > Eps)
Y[FE[Current][5] - 1] = ty;
if (fabs((tz = 0.5*(Z[FE[Current][2] - 1] + Z[FE[Current][1] - 1])) - Z[FE[Current][5] - 1]) > Eps)
Z[FE[Current][5] - 1] = tz;
if (fabs((tx = 0.5*(X[FE[Current][0] - 1] + X[FE[Current][2] - 1])) - X[FE[Current][6] - 1]) > Eps)
X[FE[Current][6] - 1] = tx;
if (fabs((ty = 0.5*(Y[FE[Current][0] - 1] + Y[FE[Current][2] - 1])) - Y[FE[Current][6] - 1]) > Eps)
Y[FE[Current][6] - 1] = ty;
if (fabs((tz = 0.5*(Z[FE[Current][0] - 1] + Z[FE[Current][2] - 1])) - Z[FE[Current][6] - 1]) > Eps)
Z[FE[Current][6] - 1] = tz;
if (fabs((tx = 0.5*(X[FE[Current][0] - 1] + X[FE[Current][3] - 1])) - X[FE[Current][7] - 1]) > Eps)
X[FE[Current][7] - 1] = tx;
if (fabs((ty = 0.5*(Y[FE[Current][0] - 1] + Y[FE[Current][3] - 1])) - Y[FE[Current][7] - 1]) > Eps)
Y[FE[Current][7] - 1] = ty;
if (fabs((tz = 0.5*(Z[FE[Current][0] - 1] + Z[FE[Current][3] - 1])) - Z[FE[Current][7] - 1]) > Eps)
Z[FE[Current][7] - 1] = tz;
if (fabs((tx = 0.5*(X[FE[Current][3] - 1] + X[FE[Current][1] - 1])) - X[FE[Current][8] - 1]) > Eps)
X[FE[Current][8] - 1] = tx;
if (fabs((ty = 0.5*(Y[FE[Current][3] - 1] + Y[FE[Current][1] - 1])) - Y[FE[Current][8] - 1]) > Eps)
Y[FE[Current][8] - 1] = ty;
if (fabs((tz = 0.5*(Z[FE[Current][3] - 1] + Z[FE[Current][1] - 1])) - Z[FE[Current][8] - 1]) > Eps)
Z[FE[Current][8] - 1] = tz;
if (fabs((tx = 0.5*(X[FE[Current][3] - 1] + X[FE[Current][2] - 1])) - X[FE[Current][9] - 1]) > Eps)
X[FE[Current][9] - 1] = tx;
if (fabs((ty = 0.5*(Y[FE[Current][3] - 1] + Y[FE[Current][2] - 1])) - Y[FE[Current][9] - 1]) > Eps)
Y[FE[Current][9] - 1] = ty;
if (fabs((tz = 0.5*(Z[FE[Current][3] - 1] + Z[FE[Current][2] - 1])) - Z[FE[Current][9] - 1]) > Eps)
Z[FE[Current][9] - 1] = tz;
}
if (++Current == 999)
{
Matrix<DWORD> t = FE;
FE.ReSize(2 * FE.Size1(),10);
for (DWORD i = 0; i < Current; i++)
for (DWORD j = 0; j < 10; j++)
FE[i][j] = t[i][j];
}
if (Current % 100 == 0)
printf("Line: %ld\r",Current);
}
NumFE = Current;
for (DWORD i = 0; i < NumFE; i++)
for (DWORD j = 0; j < 10; j++)
FE[i][j]--;
printf(" \r");
return true;
}
bool ReadCubeData(char* fn1,char*fn2,FILE* in1,FILE* in2,Vector<double>& X,Vector<double>& Y,Vector<double>& Z,
Matrix<DWORD>& FE,DWORD& NumPoints,DWORD& NumFE)
{
double tx,
ty,
tz;
char TextBuffer[1001];
DWORD Current = 0L,
tmp;
while (!feof(in1))
{
if (fgets(TextBuffer,1000,in1) == NULL)
{
if (feof(in1)) break;
printf("Unable read file %s",fn1);
fclose(in1);
fclose(in2);
return false;
}
if (sscanf(TextBuffer,"%ld %lf %lf %lf", &NumPoints,&tx,&ty,&tz) != 4) continue;
X[Current] = tx;
Y[Current] = ty;
Z[Current] = tz;
if (++Current == 999)
{
Vector<double> t1 = X,
t2 = Y,
t3 = Z;
X.ReSize(2 * X.Size());
Y.ReSize(2 * X.Size());
Z.ReSize(2 * X.Size());
for (DWORD i = 0; i < Current; i++)
{
X[i] = t1[i];
Y[i] = t2[i];
Z[i] = t3[i];
}
}
if (Current % 100 == 0)
printf("Line: %ld\r",Current);
}
fclose(in1);
printf(" \r");
NumPoints = Current;
Current = 0L;
while (!feof(in2))
{
if (fgets(TextBuffer,1000,in2) == NULL)
{
if (feof(in2)) break;
printf("Unable read file %s",fn2);
fclose(in2);
return false;
}
if (sscanf(TextBuffer,"%d %d %d %d %d %ld %ld %ld %ld %ld %ld %ld %ld",
&tmp,&tmp,&tmp,&tmp,&tmp,
&FE[Current][0],&FE[Current][1],&FE[Current][3],&FE[Current][2],
&FE[Current][4],&FE[Current][5],&FE[Current][7],&FE[Current][6]) != 13) continue;
if (++Current == 999)
{
Matrix<DWORD> t = FE;
FE.ReSize(2 * FE.Size1(),10);
for (DWORD i = 0; i < Current; i++)
for (DWORD j = 0; j < 10; j++)
FE[i][j] = t[i][j];
}
if (Current % 100 == 0)
printf("Line: %ld\r",Current);}
NumFE = Current;
for (DWORD i = 0; i < NumFE; i++)
for (DWORD j = 0; j < 10; j++)
FE[i][j]--;
printf(" \r");
return true;}ПРИЛОЖЕНИЕ 2.
Исходный текст программы, реализующей алгоритм компактного хранения и решения СЛАУ высокого порядка.
#include "matrix.h"
class RVector
{
private:
Vector<double> Buffer;
public:
RVector(void) {}
~RVector() {}
RVector(DWORD Size) { Buffer.ReSize(Size); }
RVector(RVector& right) { Buffer = right.Buffer; }
RVector(Vector<double>& right) { Buffer = right; }
DWORD Size(void) { return Buffer.Size(); }
void ReSize(DWORD Size) { Buffer.ReSize(Size); }
double& operator [] (DWORD i) { return Buffer[i]; }
RVector& operator = (RVector& right) { Buffer = right.Buffer; return *this; }
RVector& operator = (Vector<double>& right) { Buffer = right; return *this; }
void Sub(RVector&);
void Sub(RVector&,double);
void Mul(double);
void Add(RVector&);
friend double Norm(RVector&,RVector&);
};
class TSMatrix
{
private:
Vector<double> Right;
Vector<double>* Array;
Vector<DWORD>* Links;
uint Dim;
DWORD Size;
public:
TSMatrix(void) { Size = 0; Dim = 0; Array = NULL; Links = NULL; }
TSMatrix(Vector<DWORD>*,DWORD,uint);
~TSMatrix(void) { if (Array) delete [] Array; }
Vector<double>& GetRight(void) { return Right; }
DWORD GetSize(void) { return Size; }
uint GetDim(void) { return Dim; }
Vector<double>& GetVector(DWORD i) { return Array[i]; }
Vector<DWORD>* GetLinks(void) { return Links; }
void SetLinks(Vector<DWORD>* l) { Links = l; }
void Add(Matrix<double>&,Vector<DWORD>&);
void Add(DWORD I, DWORD L, DWORD J, DWORD K, double v)
{
DWORD Row = I,
Col = L * Links[I].Size() * Dim + Find(I,J) * Dim + K;
Array[Row][Col] += v;
}
void Add(DWORD I, double v)
{
Right[I] += v;
}
DWORD Find(DWORD,DWORD);
void Restore(Matrix<double>&);
void Set(DWORD,DWORD,double,bool);
void Set(DWORD Index1,DWORD Index2,double value)
{
DWORD I = Index1 / Dim,
L = Index1 % Dim,
J = Index2 / Dim,
K = Index2 % Dim,
Pos = Find(I,J),
Row = I,
Col;
if (Pos == DWORD(-1)) return;
Col = L * Links[I].Size() * Dim + Find(I,J) * Dim + K;
Array[Row][Col] = value;
}
bool Get(DWORD Index1,DWORD Index2,double& value)
{
DWORD I = Index1 / Dim,
L = Index1 % Dim,
J = Index2 / Dim,
K = Index2 % Dim,
Pos = Find(I,J),
Row = I,
Col;
value = 0;
if (Pos == DWORD(-1)) return false;
Col = L * Links[I].Size() * Dim + Find(I,J) * Dim + K;
value = Array[Row][Col];
return true;
}
void Mul(RVector&,RVector&);
double Mul(DWORD,RVector&);
void write(ofstream&);
void read(ifstream&);
};
class RMatrix
{
private:
Vector<double> Buffer;
DWORD size;
public:
RMatrix(DWORD sz) { size = sz; Buffer.ReSize(size*(size + 1)*0.5); }
~RMatrix() {}
DWORD Size(void) { return size; }
double& Get(DWORD i,DWORD j) { return Buffer[(2*size + 1 - i)*0.5*i + j - i]; }
};
//************************
#include "smatrix.h"
double Norm(RVector& Left,RVector& Right)
{
double Ret = 0;
for (DWORD i = 0; i < Left.Size(); i++)
Ret += Left[i] * Right[i];
return Ret;
}
void RVector::Sub(RVector& Right)
{
for (DWORD i = 0; i < Size(); i++)
(*this)[i] -= Right[i];
}
void RVector::Add(RVector& Right)
{
for (DWORD i = 0; i < Size(); i++)
(*this)[i] += Right[i];
}
void RVector::Mul(double koff)
{
for (DWORD i = 0; i < Size(); i++)
(*this)[i] *= koff;
}
void RVector::Sub(RVector& Right,double koff)
{
for (DWORD i = 0; i < Size(); i++)
(*this)[i] -= Right[i]*koff;
}
TSMatrix::TSMatrix(Vector<DWORD>* links, DWORD size, uint dim)
{
Dim = dim;
Links = links;
Size = size;
Right.ReSize(Dim * Size);
Array = new Vector<double>[Size];
for (DWORD i = 0; i < Size; i++)
Array[i].ReSize(Links[i].Size() * Dim * Dim);
}
void TSMatrix::Add(Matrix<double>& FEMatr,Vector<DWORD>& FE)
{
double Res;
DWORD RRow;
for (DWORD i = 0L; i < FE.Size(); i++)
for (DWORD l = 0L; l < Dim; l++)
for (DWORD j = 0L; j < FE.Size(); j++)
for (DWORD k = 0L; k < Dim; k++)
{
Res = FEMatr[i * Dim + l][j * Dim + k];
if (Res) Add(FE[i],l,FE[j],k,Res);
}
for (DWORD i = 0L; i < FE.Size(); i++)
for (DWORD l = 0L; l < Dim; l++)
{
RRow = FE[UINT(i % (FE.Size()))] * Dim + l;
Res = FEMatr[i * Dim + l][FEMatr.Size1()];
if (Res) Add(RRow,Res);
}
}
DWORD TSMatrix::Find(DWORD I,DWORD J)
{
DWORD i;
for (i = 0; i < Links[I].Size(); i++)
if (Links[I][i] == J) return i;
return DWORD(-1);
}
void TSMatrix::Restore(Matrix<double>& Matr)
{
DWORD i,
j,
NRow,
NPoint,
NLink,
Pos;
Matr.ReSize(Size * Dim,Size * Dim + 1);
for (i = 0; i < Size; i++)
for (j = 0; j < Array[i].Size(); j++)
{
NRow = j / (Array[i].Size() / Dim); // Number of row
NPoint = (j - NRow * (Array[i].Size() / Dim)) / Dim; // Number of points
NLink = j % Dim; // Number of link
Pos = Links[i][NPoint];
Matr[i * Dim + NRow][Pos * Dim + NLink] = Array[i][j];
}
for (i = 0; i < Right.Size(); i++) Matr[i][Matr.Size1()] = Right[i];
}
void TSMatrix::Set(DWORD Index,DWORD Position,double Value,bool Case)
{
DWORD Row = Index,
Col = Position * Links[Index].Size() * Dim + Find(Index,Index) * Dim + Position,
i;
double koff = Array[Row][Col],
val;
if (!Case)
Right[Dim * Index + Position] = Value;
else
{
Right[Index * Dim + Position] = Value * koff;
for (i = 0L; i < Size * Dim; i++)
if (i != Index * Dim + Position)
{
Set(Index * Dim + Position,i,0);
Set(i,Index * Dim + Position,0);
if (Get(i,Index * Dim + Position,val))
Right[i] -= val * Value;
}
}
}
void TSMatrix::Mul(RVector& Arr,RVector& Res)
{
DWORD i,
j,
NRow,
NPoint,
NLink,
Pos;
Res.ReSize(Arr.Size());
for (i = 0; i < Size; i++)
for (j = 0; j < Array[i].Size(); j++)
{
NRow = j / (Array[i].Size() / Dim);
NPoint = (j - NRow * (Array[i].Size() / Dim)) / Dim;
NLink = j % Dim;
Pos = Links[i][NPoint];
Res[i * Dim + NRow] += Arr[Pos * Dim + NLink] * Array[i][j];
}
}
double TSMatrix::Mul(DWORD Index,RVector& Arr)
{
DWORD j,
I = Index / Dim,
L = Index % Dim,
Start = L * (Array[I].Size() / Dim),
Stop = Start + (Array[I].Size() / Dim),
NRow,
NPoint,
NLink,
Pos;
double Res = 0;
for (j = Start; j < Stop; j++)
{
NRow = j / (Array[I].Size() / Dim);
NPoint = (j - NRow * (Array[I].Size() / Dim)) / Dim;
NLink = j % Dim;
Pos = Links[I][NPoint];
Res += Arr[Pos * Dim + NLink] * Array[I][j];
}
return Res;
}
void TSMatrix::write(ofstream& Out)
{
DWORD ColSize;
Out.write((char*)&(Dim),sizeof(DWORD));
Out.write((char*)&(Size),sizeof(DWORD));
for (DWORD i = 0; i < Size; i++)
{
ColSize = Array[i].Size();
Out.write((char*)&(ColSize),sizeof(DWORD));
for (DWORD j = 0; j < ColSize; j++)
Out.write((char*)&(Array[i][j]),sizeof(double));
}
for (DWORD i = 0; i < Size * Dim; i++)
Out.write((char*)&(Right[i]),sizeof(double));
}
void TSMatrix::read(ifstream& In)
{
DWORD ColSize;
In.read((char*)&(Dim),sizeof(DWORD));
In.read((char*)&(Size),sizeof(DWORD));
if (Array) delete [] Array;
Array = new Vector<double>[Size];
Right.ReSize(Size * Dim);
for (DWORD i = 0; i < Size; i++)
{
In.read((char*)&(ColSize),sizeof(DWORD));
Array[i].ReSize(ColSize);
for (DWORD j = 0; j < ColSize; j++)
In.read((char*)&(Array[i][j]),sizeof(double));
}
for (DWORD i = 0; i < Size * Dim; i++)
In.read((char*)&(Right[i]),sizeof(double));
}
Список литературы
Зенкевич О., Морган К. Конечные методы и аппроксимация // М.: Мир, 1980
Зенкевич О., Метод конечных элементов // М.: Мир., 1975
Стрэнг Г., Фикс Дж. Теория метода конечных элементов // М.: Мир, 1977
Бахвалов Н.С.,Жидков Н.П., Кобельков Г.М. Численные методы // М.: наука, 1987
Воеводин В.В., Кузнецов Ю.А. Матрицы и вычисления // М.:Наука, 1984
Бахвалов Н.С. Численные методы // М.: Наука, 1975
Годунов С.К. Решение систем линейных уравнений // Новосибирск: Наука, 1980
Гоменюк С.И., Толок В.А. Инструментальная система анализа задач механики деформируемого твердого тела // Приднiпровський науковий вiсник – 1997. – №4.
F.G. Gustavson, “Some basic techniques for solving sparse matrix algorithms”, // editer by D.J. Rose and R.A.Willoughby, Plenum Press, New York, 1972
А.Джордж, Дж. Лиу, Численное решение больших разреженных систем уравнений // Москва, Мир, 1984
D.J. Rose, “A graph theoretic study of the numerical solution of sparse positive definite system of linear equations” // New York, Academic Press, 1972
Мосаковский В.И., Гудрамович В.С., Макеев Е.М., Контактные задачи теории оболочек и стержней // М.:”Машиностроение”, 1978
Для подготовки данной работы были использованы материалы с сайта http://www.ed.vseved.ru/
Похожие работы
... и прикладная морфология вновь являются важным полигоном для лингвистичес- кой теории и практики. Обеспечение взаимодействия с ЭВМ на естественном языке (ЕЯ) является важнейшей задачей исследований по искусственному интеллекту (ИИ). Базы данных, пакеты прикладных программ и экспертные системы, основанные на ИИ, требуют оснащения их гибким интерфейсом для многочисленных пользователей, не желающих ...
... раза. В силу специфичности информации схемы определения количества информации, связанные с ее содержательной стороной, оказываются не универсальными. Универсальным оказывается алфавитный подход к измерению количества информации. В этом подходе сообщение, представленное в какой-либо знаковой системе, рассматривается как совокупность сообщений о том, что заданная позиция в последовательности ...
0 комментариев