Навигация
Расчётно-графическая работа
10533
знака
5
таблиц
11
изображений
4. Расчётно-графическая работа
Условие задачи:
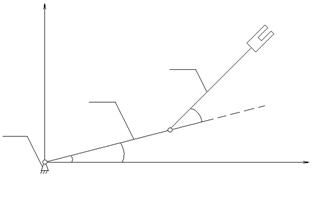
Манипулятор промышленного робота типа 2В состоит из двух вращающихся звеньев 1 и 2. Звенья движутся в плоскости XOY. Центр схвата манипулятора – точка С. Заданы функции изменения углов ![]() и
и ![]() (
(![]() ,
, ![]() ) и размеры звеньев
) и размеры звеньев ![]() . Определить скорости и ускорения центра схвата и звеньев манипулятора при движении робота в течении t с (значения определить через каждые
. Определить скорости и ускорения центра схвата и звеньев манипулятора при движении робота в течении t с (значения определить через каждые ![]() с). По результатам расчёта построить графики зависимостей скоростей и ускорений центра и звеньев манипулятора. Проанализировать полученные графики.
с). По результатам расчёта построить графики зависимостей скоростей и ускорений центра и звеньев манипулятора. Проанализировать полученные графики.
Решение:
1.1 Задаём движение подвижным звеньям манипулятора:
Звенья совершают вращательные движения, закон движения имеет вид
![]()
 (1)
(1)
где ![]() - углы поворота звеньев вокруг центра шарнира сочленяющего данные звенья с предыдущими звеньями кинематической схемы.
- углы поворота звеньев вокруг центра шарнира сочленяющего данные звенья с предыдущими звеньями кинематической схемы.
t - время.
1.2 Исследуем движения звеньев манипулятора:
Дифференцируя уравнения типа (1), определяем угловую скорость и угловое ускорение:
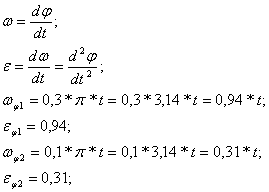
(2)
(3)
Используя формулы (2),(3) определяем скорости и ускорения звеньев для моментов времени ![]() и так далее. Результаты расчётов представлены в Таблице №1.
и так далее. Результаты расчётов представлены в Таблице №1.
Таблица №1
Значения скоростей и ускорения звеньев
| Моменты времени, с | Звено 1 | Звено 2 | ||
|
|
|
|
| |
| 1 | 0,940 | 0,94 | 0,310 | 0,31 |
| 1,1 | 1,034 | 0,94 | 0,341 | 0,31 |
| 1,2 | 1,128 | 0,94 | 0,372 | 0,31 |
| 1,3 | 1,222 | 0,94 | 0,403 | 0,31 |
| 1,4 | 1,316 | 0,94 | 0,434 | 0,31 |
| 1,5 | 1,410 | 0,94 | 0,465 | 0,31 |
| 1,6 | 1,504 | 0,94 | 0,496 | 0,31 |
| 1,7 | 1,598 | 0,94 | 0,527 | 0,31 |
| 1,8 | 1,692 | 0,94 | 0,558 | 0,31 |
| 1,9 | 1,786 | 0,94 | 0,589 | 0,31 |
| 2 | 1,880 | 0,94 | 0,620 | 0,31 |
Строим графики зависимости параметров ![]() от времени t для двух звеньев.
от времени t для двух звеньев.
Анализ графиков:
1.3.Определение движения центра схвата:
Используя формулы (1), определяющие движения отдельных звеньев, заданные размеры звеньев, записываем уравнения движения центра схвата в координатной форме
 (4)
(4)
Уравнения (4) определяют положение исследуемой материальной точки в любой момент времени t. Дифференцируя уравнения (4) , определяем проекции скорости точки на координатные оси:
 (5)
(5)

Дифференцируя полученные значения скоростей, получаем проекции ускорения точки:
 (6)
(6)

Скорость и ускорение точки по модулю определяются в виде:
![]() (7)
(7)
![]() (8)
(8)
1.4 Исследование движения центра схвата:
По формулам (5) и (6) определяем значения проекций скорости и ускорения исследуемой точки на оси координат для моментов времени ![]() и так далее. По формулам (7) и (8) определяют скорость и ускорение точки для тех же моментов времени. Результаты расчётов представляют в Таблице 2.
и так далее. По формулам (7) и (8) определяют скорость и ускорение точки для тех же моментов времени. Результаты расчётов представляют в Таблице 2.
Таблица 2:
| Моменты времени, | Проекции ускорения, |
| Проекции ускорения,
|
| ||
|
|
|
|
| |||
| 1 | -0,0080336 | 0,84996121 | 0,84999919 | -0,9179904 | 0,84118409 | 1,24510925 |
| 1,1 | -0,0106926 | 0,93493753 | 0,93499834 | -1,1107440 | 0,83709273 | 1,39084938 |
| 1,2 | -0,0138818 | 1,01990349 | 1,01999794 | -1,3218391 | 0,83171967 | 1,56173500 |
| 1,3 | -0,0176493 | 1,10485599 | 1,10499694 | -1,5512678 | 0,82482167 | 1,75691848 |
| 1,4 | -0,0220432 | 1,18979141 | 1,18999558 | -1,7990198 | 0,81613441 | 1,97548667 |
| 1,5 | -0,0271117 | 1,27470549 | 1,27499376 | -2,0650822 | 0,80537248 | 2,21657152 |
| 1,6 | -0,0329028 | 1,35959333 | 1,35998085 | -2,3494392 | 0,79222938 | 2,47941362 |
| 1,7 | -0,0394645 | 1,44444935 | 1,44498835 | -2,6520714 | 0,77637761 | 2,76337563 |
| 1,8 | -0,0468450 | 1,52926720 | 1,52998451 | -2,9729552 | 0,75746865 | 3,06793438 |
| 1,9 | -0,0550921 | 1,61403975 | 1,61497915 | -3,3120629 | 0,73513302 | 3,39266579 |
| 2 | -0,0642536 | 1,69875905 | 1,69997375 | -3,6693614 | 0,70898037 | 3,73759635 |
Таблица 3:
Координаты движения центра схвата.
| Моменты времени, | Значения координат | |
|
|
| |
| 1 | 0,79996505 | 0,00740209 |
| 1,1 | 0,79994883 | 0,00895646 |
| 1,2 | 0,79992752 | 0,01065883 |
| 1,3 | 0,79990018 | 0,01250918 |
| 1,4 | 0,79998657 | 0,01450747 |
| 1,5 | 0,79982307 | 0,01665367 |
| 1,6 | 0,79977096 | 0,01894775 |
| 1,7 | 0,79970811 | 0,02138965 |
| 1,8 | 0,79963313 | 0,02397931 |
| 1,9 | 0,79954455 | 0,02671667 |
| 2 | 0,79944087 | 0,02960162 |
По данным табл.2 строят графики зависимости параметров ![]() от времени t. По данным табл.3 строят график перемещения центра схвата.
от времени t. По данным табл.3 строят график перемещения центра схвата.
Оценка графиков:
Зависимости V и a от t (1 ,0<t<2,0):
Из анализа графиков скорости и ускорения видно, что cкорость и ускорение в промежутке времени от t0 до tk возрастают, поэтому движении ускоренное.
Траектории движения центра схвата (1 ,0<t<2,0):
Из анализа графика видно, что центр схвата манипулятора перемещается в плоскости XOY по прямой вдоль линии OY.
Список литературы:
1) Методические указания к выполнению расчетно-графических работ 1 и 2 по теоретической механике. С.С. Степанов, Л.Д. Чуракова; ЛЭИС. – Л., 2009г.
2) Методические указания к лабораторным работам по курсу ”Прикладная механика”. В.Ф. Рожченко, С.С. Степанов, Л.Д. Чуракова; ЛЭИС. – Л., 2009г.
3) Курс лекций по курсу прикладная механика. Л.Д. Чуракова.
Похожие работы

... условий взаимной уравновешенности системы сил является одной из основных задач статики. На основе изложенной в первой главе курсовой работы алгоритм конструкции языка программирования Паскаль составим и решим ряд задач по прикладной механике. Сформулируем задачу по статике первому разделу прикладной механики. Задача. Найти центр тяжести тонкого круглого однородного стержня изогнутого по дуге ...
... Ѕ–207,9Ѕ> 160. комитет по высшему образованию Российской Федерации Московская Государственная Академия Тонкой Химической Технологии им. М.В. Ломоносова кафедра : “Прикладная механика и основы конструирования.” Расчетно-графическая работа № 2 : “Расчет нагруженной балки” Вариант №: 24 студент: Холин Андрей Юрьевич (группа Е-203) преподаватель: Сергеев Александр Иванович 1998г. Задание ...



... и трещинами. Решение построено на использовании теории функции комплексного переменного и удовлетворении граничным условиям методом наименьших квадратов. 1 Термодинамические основы термоупругости 1.1 Термоупругость Основное уравнение термоупругости. При термическом расширении изотропное тело деформируется таким образом, что компоненты деформации отнесенные к системе прямоугольных осей ...
... ребрами) изображают конструктивные и потоковые функциональные структуры [14]. Принципы построения функциональных структур технических объектов рассматриваются в последующих главах курса "Основы проектирования им конструирования" не включенных в настоящее пособие. Для систем управления существуют характеристики, которые можно использовать в качестве критериев для оценки структур. Одна из них - ...
0 комментариев