Навигация
Расчет переходных процессов в электроприводе за цикл работы
28782
знака
0
таблиц
0
изображений
6 Расчет переходных процессов в электроприводе за цикл работы
Структурная схема СУ ЭП типа ЭПУ1 приведена на рисунке 6.1. СУ содержат в своем составе: регулятор ЭДС (РЭ) и управляющий орган (УО), предназначенный для реализации токовой отсечки, на который подается сигнал обратной связи по току якорной цепи.
Для нахождения передаточной функции регулятора ЭДС необходимо предварительно свернуть внутренний контур электродвигателя по формуле:
WЗ(Р) = ,
Где WЗ(Р) – передаточная функция замкнутого контура;
WПР(Р) – передаточная функция прямой ветви;
WОБР(Р) – передаточная функция обратной ветви.
При этом целесообразно произвести условный перенос цепи обратной связи как показано прерывистой линией.
WПР(Р) = *Се*.
WОБР(Р) = СЕ.
WЗК(Р) == ,
Где ТМ – механическая постоянная времени электродвигателя.
ТМ = .
ТМ = = 0,067 с.
Полученное выражение с достаточной степени точности можно преобразовать в выражение:
WЗК(Р) =
Для синтеза регулятора ЭДС /6/, влиянием отсечки по току можно условно пренебречь и полученный разомкнутый контур регулирования ЭДС, состоящий из передаточной функции преобразователя и оптимизированной свернутой передаточной функции электродвигателя, приравнять к желаемой передаточной функции разомкнутого контура регулирования настраиваемого на симметричный оптимум:
WЖР(Р) =
При выборе желаемой передаточной функции замкнутой системы, Тm принимают равной некомпенсируемой малой постоянной времени объекта регулирования, которую невозможно компенсировать принципиально или нецелесообразно компенсировать из соображений помехоустойчивости системы.
WРАЗ.Э(Р) = WРЭ(Р) **Се*КОЭ.
WРЭ(Р) *Се*КОЭ = .
В полученном уравнении только суммарная постоянная времени ТЯ + ТМ подлежит компенсации, так как постоянная времени ТТП не может быть скомпенсирована потому, что тиристорный преобразователь является дискретным звеном и его динамические свойства зависят только от свойств силовых вентилей, входящих в силовую схему. Поэтому Тm = ТЯ + ТМ.
Из полученного уравнения находим передаточную функцию регулятора:
WРЭ(Р) =
Полученная передаточная функция соответствует ПИ-регулятору.
Особенностью моделирования СУ ЭП типа ЭПУ1 (с регулятором ЭДС (РЭ) и управляющим органом (УО)) является необходимость ограничения допустимого значения тока якоря путем ограничения выходного сигнала регулятора ЭДС UВЫХ.Р, в дополнение к собственному ограничению регулятора, исходя из условия:
если ABS(IЯЦ) ³ IДОП.ЯЦ , то UВЫХ.Р =
где wДВ – текущая скорость вращения электродвигателя;
IДОП..ЯЦ – допустимый ток якорной цепи с учетом перегрузочной способности электродвигателя.
При моделировании регулятора следует производить учет нелинейностей, возникающих при работе реальных операционных усилителей (ОУ), обусловленных ограничением уровня выходного сигнала уровнем напряжения питания (в общем случае UПИТ.ОУ = ±10 В). В связи с этим в программе следует задавать условия ограничения, соответствующие зоне изменения выходного сигнала ОУ, а при наличии в составе регулятора интегральной составляющей, при достижении выходным сигналом ОУ предельных значений, производится условное размыкание интегральной ветви регулятора. Для реверсивных регуляторов зона изменения выходного сигнала: +10.0 ...–10.0.
Для представления структурной схемы (рисунок 6.1) в удобном виде для описания на языке программирования необходимо произвести разбиение передаточных функций отдельных элементов на элементарные звенья, а также учесть влияние нелинейностей. При этом получим математическую модель, приведенную на рисунке 6.2.
Параметры математической модели:
А[1] = =
= = 0,003;
А[2] = =
= = 0,3;
А[3] = КП = 23.
А[4] = = = 100.
А[5] = = = 10,62;
А[6] = = = 14,7;
А[7] = СЕ = 3,269;
А[8] = СЕ = 3,269;
А[9] = = = 0,13;
А[10] = КОЭ = 0,04871;
А[11] = UЗ;
А[12] = IЯДОП = IЯН*l = 195,5*3 = 586,5;
А[13] = IЯДОП RЯЦ= 586,5*0,0941 = 55,18;
А[14] = КП = 23.
А[15] = МС;
А[16] = = = 0,04371.
Рассчитаем напряжение задания по формуле:
UЗАД = w*Се*КОЭ.
Для скорости w = 57,18 с-1:
UЗАД = 57,18*3,269*0,04871 = 9,1 В.
Для скорости w = 2,9463 с-1:
UЗАД = 2,9463*3,269*0,04871 = 0,469 В.
Моделирование производится по следующим режимам:
1) пуск на номинальную скорость (UЗАД = 9,1 В; МС = 907,47 Н*м);
2) торможение до пониженной скорости (UЗАД = 0,469 В; МС = 907,47 Н*м);
3) торможение до 0 (UЗАД = 0 В; МС = 907,47 Н*м);
4) пуск на номинальную скорость (UЗАД = - 9,1 В; МС = 655,84 Н*м);
5) торможение до пониженной скорости (UЗАД = - 0,469 В; МС = 655,84 Н*м);
6) торможение до 0 (UЗАД = 0 В; МС = 655,84 Н*м).
Графики переходных процессов и таблицы результатов находятся в приложении.
Анализируя графики переходных процессов делаем вывод, что спроектированный электропривод обеспечивает динамические режимы спуска-подъема с соблюдением допустимого ускорения. Процесс торможения до 0 имеет затянутый характер, что незначительно влияет на весь цикл работы лифта в целом.
7 Проверка правильности расчета мощности и окончательный выбор двигателя
Для проверки электродвигателя по нагреву воспользуемся формулой для определения эквивалентного тока за цикл подъема-спуска:
IЭКВ = Ö .
IЭКВ = Ö
= 266,54 А.
Определим продолжительность включения двигателя:
ПВР = *100% = 24,5%.
Произведем перерасчет на стандартное значение ПВСТ = 100%:
IЭКВ(ПВСТ) = IЭКВ*Ö .
IЭКВ(100%) = 266.54*Ö = 132.159 А.
Как видно из полученного значения, электродвигатель проходит по нагреву, так как:
IН.ДВ > IЭКВ(100%).
195,5 А > 132,159 А.
Имеющийся запас по мощности необходим для обеспечения динамических режимов, так как система имеет значительный момент инерции.
Похожие работы
... , необходимых для осуществления проектного решения. СНиП 11-01-95 “Инструкция о порядке разработки, согласования, утверждения и составе проектной документации на строительство предприятий, зданий и сооружений”. Проект состоит из технологической и строительно-экономической частей. Экономическое обоснование технологической части выполняется инженерами-технологами и экономистами-технологами, а ...
171499
64
3
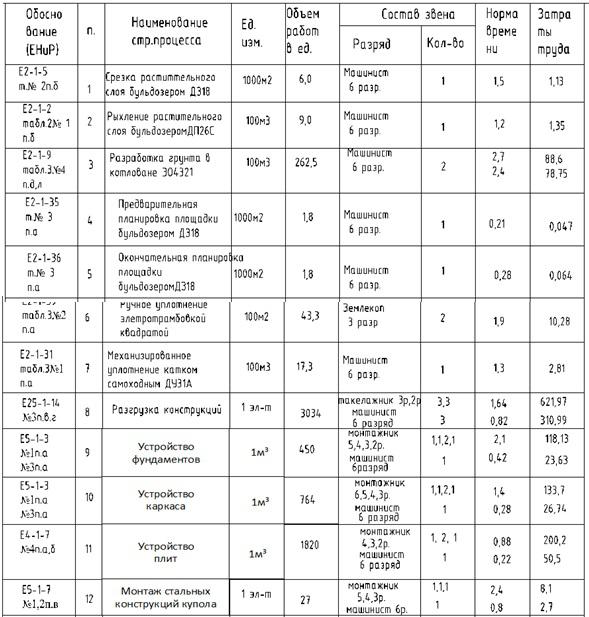
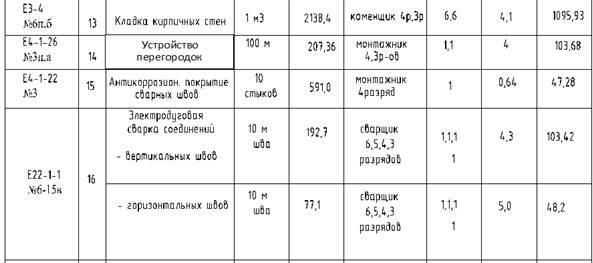
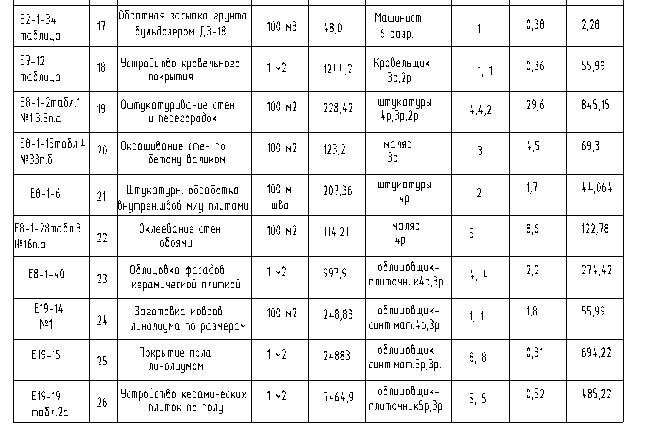
... укладкой ее в дело, поверхность сборной плиты днища должна быть очищена от пыли и грязи, пропескоструена и промыта водой. 1.7.8 Генеральный план Генеральный план средней школы на 1000 мест в городе Усть-Каменогорске Восточно-Казахстанской области разработан на основании: архитектурно-планировочного проекта строительства средней школы на 1000 мест с государственным языком обучения в 14 жилом ...
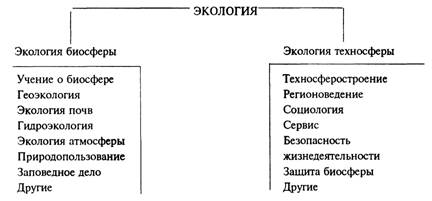
... или технологических процессов; – при выборе технического решения обеспечить малоотходность производства и максимальную эффективность использования энергоресурсов. Задачи специалиста в области безопасности жизнедеятельности сводятся к следующему; – контроль и поддержание допустимых условий (параметры микроклимата, освещение и др.) жизнедеятельности человека в техносфере; – идентификация ...
... в строительстве. Раздел предусматривает основные решения и организационно-технические мероприятия по монтажу конструкций шатра покрытия здания 2-го этапа строительства спортивного комплекса «Ледовый дворец» в г. Коломна Московской области. На период производства работ предусматривается использование для нужд строительства временных и постоянных автодорог, сетей электроэнергии и водоснабжения. ...
0 комментариев