Навигация
1 h h2 = 300 км n(h) линейно возрастает до nm , где nm максимальное значение n(h) ;






3. при h2 h h3 = 400 км n(h) = nm ;
4. при h h3 = 400 км n(h) = nm e![]()
a=200 км.
Используя данную аппроксимацию для n(h) , получим формулу для оценки ионосферной погрешности беззапросных измерений дальности (псевдодальности) до зенитного НКА
R1 = bэ nm ;
bэ = 0,5 (h2-h1)+(h3-h2)+a=400 км .
Параметр bэ можно назвать толщиной эквивалентной ионосферы, у которой n(h) = nm на высотах h = 200...600 км и вне этих высот n(h) = 0.
Ионосферную погрешность R2 псевдодальности горизонтного НКА ( ) можно приблизительно оценить следующим образом:
R2 = R1/ cos ; sin = r/(r+h3) ,
где угол между радиолучом от горизонтного НКА ( ) и местной вертикалью на высоте h3=400 км (середина эквивалентной ионосферы) ; r радиус Земли . Проводя вычисления , получим и соответственно R2=3,3 R1. Для пригоризонтного НКА ( =5 ...10 ) можно считать, что R2=3 R1.
Найдем величину nm для несущей частоты f=1600 МГц навигационного радиосигнала. В средних широтах в худший сезон (зимний день) в годы максимальной солнечной активности максимальная электронная концентрация на высотах 300...400 км может достигать N = 3,0 106 эл/см3, и соответственно для f=1,6 106 кГц получим
nm=3,8 10-5 , R1=15 м , R2=45 м.
Ночью и летом ионосферные погрешности будут в несколько раз меньше. В годы минимальной солнечной активности ионосферные погрешности даже в зимний день в 5...6 раз меньше приведенных выше максимальных значений.
Обсудим перспективу, когда в системе ГЛОНАСС будут эксплуатироваться НКА второй модификации, которые будут излучать двухкомпонентный навигационный радиосигнал 1250 МГц вместо однокомпонентного радиосигнала 1250 МГц в НКА первой модификации. Соответственно появляется возможность проводить измерения навигационных параметров в двухдиапазонной НАП с использованием узкополосных радиосигналов 1600 МГц и1250 МГц для исключения ионосферных погрешностей измерений. Но при двухдиапазонном измерении псевдодальности значительно возрастут шумовые погрешности и погрешности из-за многолучевости по сравнении с однодиапазонной НАП (1600 МГц). На динамичных объектах с недетерминированной моделью движения (T0=1 с) нецелесообразно применять двухдиапазонные узкополосные навигационные радиосигналы 1600 МГц и 1250 МГц для определения координат объекта, поскольку в этом случае , как было показано выше:
1. шумовые погрешности псевдодальности до пригоризонтного НКА составят (S2) = 12...22 м, т.е. превысят ионосферные погрешности измерений в однодиапазонной НАП в худший сезон (зимний день);
2. погрешности псевдодальности до пригоризонтного НКА, обусловленные многолучевостью, составят (S2) = 9 м (в худшей ситуации), т.е. будут соизмеримы с ионосферными погрешностями в однодиапазонной НАП в худший сезон (зимний день).
На малодинамичных наземных объектах целесообразно применять двухдиапазонные узкополосные навигационные радиосигналы, поскольку в НАП на малодинамичных объектах можно длительно осреднять результаты измерений (T0=30 c) и снижать до необходимого уровня шумовые погрешности псевдодальности и погрешности из-за многолучевости.
Структура навигационных радиосигналов в системе ГЛОНАСС
В системе ГЛОНАСС каждый штатный НКА в ОГ постоянно излучает шумоподобные непрерывные навигационные радиосигналы в двух диапазонах частот 1600 МГц и 1250 МГц. В НАП навигационные измерения в двух диапазонах частот позволяют исключить ионосферные погрешности измерений.
Каждый НКА имеет цезиевый АСЧ, используемый для формирования бортовой шкалы (БШВ) и навигационных радиосигналов 1600 МГц и 1250 МГц.
Шумоподобные навигационные радиосигналы в ОГ НКА различаются несущими частотами. Поскольку для взаимноантиподных НКА в орбитальных плоскостях можно применять одинаковые несущие частоты, то для 24 штатных НКА минимально необходимое число несущих частот в каждом диапазоне частот равно 12. Данное утверждение достаточно очевидно, если иметь в виду наземных потребителей (сухопутных, морских, воздушных), поскольку в зоне радиовидимости наземного потребителя не могут одновременно находиться взаимно антиподные НКА. Космический потребитель может одновременно “видеть” взаимноантиподные НКА. Однако имеются два благоприятных обстоятельства.
Первое заключается в том, что из двух взаимноантиподных НКА хотя бы один будет находиться ниже местного горизонта по отношению к космическому потребителю. Практически невозможно применить на космическом объекте одну широконаправленную антенну, способную принимать навигационные радиосигналы от всех “видимых” НКА выше и ниже местного горизонта. Поэтому в НАП на космическом объекте применяют: либо одну широконаправленную антенну для приема навигационных радиосигналов от НКА, находящихся выше местного горизонта; либо несколько антенн и несколько приемников для приема навигационных радиосигналов от НКА, находящихся выше и ниже местного горизонта.
В обоих вариантах НАП на космическом объекте будет осуществлять эффективную пространственную селекцию навигационных радиосигналов от взаимноантиподных НКА.
Второе обстоятельство заключается в том, что в НАП в сеансе навигации осуществляется поиск несущей частоты каждого принимаемого навигационного радиосигнала в пределах узкой полосы ( 1 кГц) около прогнозируемого значения с учетом доплеровского сдвига несущей частоты. Доплеровский сдвиг может иметь максимальные значения 5 кГц в НАП на наземных объектах и 40 кГц в НАП на низкоорбитальных космических объектах. Следовательно, в НАП на космическом объекте осуществляется эффективная доплеровская селекция навигационных радиосигналов от радиовидимых НКА.
Таким образом, навигационные радиосигналы взаимноантиподных НКА с одинаковыми несущими частотами будут надежно разделены в НАП на космическом объекте за счет пространственной и доплеровской селекции.
Навигационный радиосигнал 1600 МГц двухкомпонентный. На заданной несущей частоте в радиопередатчике формируются два одинаковых по мощности шумоподобных фазоманипулированных навигационных радиосигнала “в квадратуре” (взаимный сдвиг по фазе на 90 ): узкополосный и широкополосный.
Узкополосный навигационный радиосигнал 1600 МГц образуется посредством манипуляции фазы несущего колебания на 180 периодической двоичной псевдослучайной последовательностью (ПСП1) с тактовой частотой F1 = 0,511 МГц и с периодом повторения Т1 = 1 мс (511 тактов). ПСП1 представляет собой М - последовательность с характеристическим полиномом 1 + X3 + X5. Путем инвертирования ПСП1 передаются метки времени (МВ) бортовой шкалы времени (БШВ) НКА и двоичные символы цифровой информации (ЦИ). Метка времени имеет длительность 0,3 с и передается в конце каждого двухсекундного интервала времени (в конце четных секунд). Метка времени содержит 30 двоичных символов длительностью 10 мс и представляет собой укороченную на один символ 31-символьную М-последовательность.
В каждой двухсекундной строке на интервале времени 1,7 с передаются 85 двоичных символов ЦИ, длительностью 20 мс и перемноженные на меандр, имеющий длительность символов 10 мс. Границы символов меандра, МВ и ЦИ когерентны. В приемнике с помощью меандра осуществляется символьная синхронизация для МВ и с ее помощью строчная и символьная синхронизация ЦИ.
Широкополосный навигационный радиосигнал 1600 МГц образуется посредством манипуляции фазы несущего колебания на 180 периодической двоичной последовательностью ПСП2 с тактовой частотой F2=5,11 МГц. Путем инвертирования ПСП2 передаются двоичные символы ЦИ длительностью 20 мс.
Навигационный радиосигнал 1250 МГц, излучаемый НКА первой модификации однокомпонентный широкополосный шумоподобный радиосигнал, образуемый посредством манипуляции фазы несущего колебания на 180 периодической двоичной ПСП2 (F2 = 5,11 МГц) без инвертирования, т.е. без передачи ЦИ. Навигационный радиосигнал 1250 МГц, излучаемый НКА второй модификации, будет содержать два одинаковых по мощности шумоподобных радиосигнала 1250 МГц в квадратуре:
1. узкополосный навигационный радиосигнал 1250 МГц с ПСП1 (F1 = 0,511 МГц, T1=1 мс);
2. широкополосный навигационный радиосигнал 1250 МГц с ПСП2 (F2=5,11 МГц) без ЦИ.
Поскольку частота инвертирования ПСП много меньше ее тактовой частоты, то ширина основного “лепестка” огибающей спектра мощности шумоподобного фазоманипулированного навигационного радиосигнала равна двойному значению тактовой частоты ПСП. Следовательно, ширина основного “лепестка” огибающей спектра мощности узкополосного навигационного радиосигнала равна 1,022 МГц, широкополосного 10,22 МГц.
При проектировании СРНС ГЛОНАСС была выработана следующая “сетка” номинальных значений несущих частот для навигационных радиосигналов в двух диапазонах частот верхнем 1600 МГц (В) и нижнем 1250 МГц (Н):
вk = в0+k в; в0=1602,0000 МГц;
в=0,5625 МГц;
нk = н0+k н; н0=1246,0000 МГц;
н=0,4375 МГц;
вk / нk = 9/7 ;
где k условный порядковый номер пары несущих частот вk и нk для навигационных радиосигналов 1600 МГц и 1250 МГц.
Радиопередатчики навигационных радиосигналов в НКА первой модификации излучают навигационные радиосигналы на переключаемых несущих частотах с номерами k = 1, ... ,24.
Приведем значения крайних несущих частот навигационных радиосигналов:
в1=1602,5625 МГц; в24=1615,5000 МГц;
н1=1246,4375 МГц; н24=1256,5000 МГц;
Рабочие спектры навигационных радиосигналов на несущих частотах с номерами k = 1, ...,24 занимают полосы частот:
а) узкополосные навигационные радиосигналы 1602,0...1616,0 МГц;
б) широкополосные навигационные радиосигналы 1597,4... ...1620,6 МГц, 1241,3...1261,6 МГц.
В диапазоне частот 1600 МГц и 1250 МГц согласно Регламенту радиосвязи выделены полосы частот:
а) для спутниковой радиосвязи (Космос Земля) 1559,0...1610,0 МГц; 1215,0...1260,0 МГц;
б) для воздушной радионавигации 1559,0...1626,5 МГц.
ВАКР-87 распределил полосу частот 1610,6...1613,8 МГц для радиоастрономии на первичной основе. Чтобы снизить и в дальнейшем полностью исключить радиопомехи радиотелескопам в диапазоне частот 1610,6...1613,8 МГц со стороны навигационных радиосигналов системы ГЛОНАСС, Администрация системы ГЛОНАСС приняла в 1993г. решение, согласно которому для 24 штатных НКА в системе ГЛОНАСС будут использоваться следующие номера (k) несущих частот:
1. до1998 г. k = 1,...,15; k = 21,...,24;
2. c 1998 г. до 2005 г. k = 1,...,12;
3. c 2005 г. k = -7,...,4.
На первом этапе (до 1998 г.) в радиоастрономической полосе практически нет спектров узкополосных навигационных радиосигналов 1600 МГц, а к 2005 г. из радиоастрономической полосы будут выведены и спектры широкополосных навигационных радиосигналов. Третий этап будет реализован за счет применения НКА второй модификации, в которой передатчики навигационных радиосигналов могут излучать навигационные радиосигналы на любой паре переключаемых несущих частот с номерами k=-7,0,...+12.
В системе НАВСТАР используются непрерывные шумоподобные навигационные радиосигналы на двух несущих частотах (верхней и нижней)
в=1575,42 МГц; н=1227,6 МГц,
и применяется кодовое разделение навигационных радиосигналов для 24 штатных НКА.
Навигационный радиосигнал на верхней несущей частоте в двухкомпонентный, он содержит два фазоманипулированных шумоподобных навигационных радиосигнала в квадратуре (сдвиг по фазе на 90 ): узкополосный и широкополосный.
Узкополосный навигационный радиосигнал в образуется посредством манипуляции фазы несущего колебания на 180 периодической ПСП1 с тактовой частотой F1 = 1,023 МГц и с периодом повторения T1 = 1 мс. Двоичные символы ЦИ длительностью 20 мс передаются инвертированием ПСП1.
Широкополосный навигационный радиосигнал в образуется посредством манипуляции фазы несущего колебания на 180 периодической ПСП2 с тактовой частотой F2 = 10,23 МГц. Двоичные символы ЦИ длительностью символов 20 мс передаются инвертированием ПСП2.
Навигационный радиосигнал н однокомпонентный, широкополосный, образован посредством манипуляции фазы несущего колебания на 180 периодической ПСП2 без инвертирования.
Широкополосные навигационные радиосигналы в системах НАВСТАР и ГЛОНАСС предназначены для использования санкционированными потребителями и имеют защиту от несанкционированного использования.
Узкополосные навигационные радиосигналы в системах НАВСТАР и ГЛОНАСС являются открытыми и предназначены для гражданских потребителей. Но в системе НАВСТАР эти сигналы искусственно искажаются с помощью процедуры селективного доступа, который ухудшает точность навигации для нелицензионных потребителей.
Точность глобальной навигации наземных подвижных объектов
Проведем оценку точности определения координат наземного подвижного объекта при глобальной оперативной навигации с помощью многоканальной НАП, использующей узкополосные навигационные радиосигналы с частотой 1600 МГц в системе ГЛОНАСС с полной ОГ штатных НКА.
Погрешность определения координат подвижного объекта зависит от геометрических факторов используемого в сеансе навигации созвездия радиовидимых НКА и обусловлены погрешностями ЭИ и ЧВП в кадрах ЦИ, принимаемых от НКА, и погрешностями измерений в НАП псевдодальностей до НКА.
При оценке точности координат подвижного объекта погрешности ЭИ и ЧВП можно пересчитать в эквивалентные погрешности псевдодальностей до НКА.
Погрешности координат НКА, пересчитанные в эквивалентные погрешности псевдодальности, есть проекции погрешностей координат НКА на направление от НКА до объекта. Обозначим: погрешности координат НКА в вертикальной и горизонтальной плоскостях. Из простых геометрических построений можно получить следующие формулы для пересчета погрешностей координат НКА в эквивалентные погрешности псевдодальностей (дальностей) от объекта до НКА:
Похожие работы
... , что считается другими государствами её главным недостатком. Более известна под названием GPS. Единственная полностью работающая спутниковая навигационная система. · ГЛОНАСС Глобальная навигационная спутниковая система (ГЛОНАСС) – советская и российская спутниковая система навигации, разработанная по заказу Министерства обороны СССР. Принадлежит министерству обороны России. Является попыткой ...
... этому адресу. Вызываемое устройство, организовав GPRS-сеанс и получив динамический IP-адрес, устанавливает TCP/IP-соединение с вызывающим устройством. 3. Анализ функционирования систем безопасности, использующих gsm каналы 3.1 Анализ помехоустойчивости и помехозащищённости gsm канала Помехи в радиоканале создаются как за счет искажений сигнала при его распространении, так и в результате ...
... , таких как: телекоммуникация, радиоместоопределение(системы навигации gps, глонасс и др.), главной задачей большинства геостационарных спутников является формирование изображений видимой земной поверхности. Спутниковые системы связи с геостационарными спутниками-ретрансляторами идеально подходят для решения таких задач, как организация телевизионного и звукового вещания на обширных территориях и ...
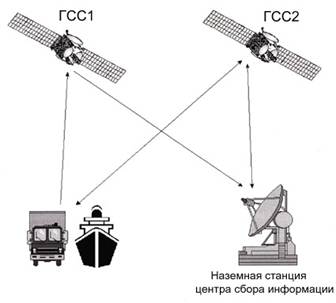
... контроль за перемещением подвижных объектов в центре сбора информации о местоположении и движении объектов или, как иногда это называют, сопровождение подвижных объектов. Спутниковые системы местоопределения подвижных объектов базируются на использовании радиолиний, обеспечивающих передачу сигналов между подвижным объектом, искусственным спутником Земли (ИСЗ) и наземной станцией, При этом ...
0 комментариев