Навигация
Залежності між положеннями і розмірами предмета і зображення. Кутове і подовжене збільшення
17845
знаков
0
таблиц
6
изображений
2. Залежності між положеннями і розмірами предмета і зображення. Кутове і подовжене збільшення
Уведення кардинальних елементів дозволяє легко визначити положення і розмір зображення графічним способом. Для цього необхідно побудувати хід двох променів, що виходять з однієї позавісьової точки В предмета АВ (рис. 5). Проведемо один промінь паралельно оптичній осі, а інший - крізь передній фокус F. На перетинанні цих променів у просторі зображень буде знаходитиметься зображення В' предметної точки В. З подібності трикутників випливає, що
- у'/у = -f/-z = z'/f¢.
Звідси можна одержати формулу Ньютона: яку можна одержати, підставивши в (3) z і z', виражені через а й а' згідно з рис. 5.
Відрізки а й а', що визначають положення предмета і зображення щодо відповідних головних площин, знаходяться з формули відрізків:
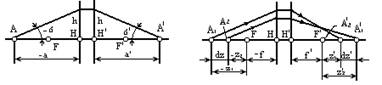
Рисунок 4- Схема для виводу формули кутового збільшення і формули кутів
Рисунок 5- Схема для знаходження продольного збільшення
zz¢ = ff¢.(3)
f'/a' + f/a = 1, (4)
При f' = -f формула (4) приймає вигляд
l/a' - l/a = 1/f'. (5)
Лінійне збільшення b може бути виражене завдяки відрізкам z, z' і f':
b = -f/z = -z/f'. (6)
Якщо у формулі (6) z і z' замінимо на а - f та а' - f', одержимо
![]() (7)
(7)
а' = (1 - b)f'. (8)
При n = n' відрізок а = (1 - b) f'/b.
Якщо відстань між площинами предмета і зображення дорівнює L, а між головними точками ![]() , то при заданих L,
, то при заданих L, ![]() і b у випадку, якщо n = n', матимемо, що
і b у випадку, якщо n = n', матимемо, що
f' = -(L-![]() )b/(1-b)2; (9)
)b/(1-b)2; (9)
a' = -(L-![]() )b/(1-b); (10)
)b/(1-b); (10)
a = -(L-![]() )/(1-b). (11)
)/(1-b). (11)
Лінійне збільшення через відрізки а й а' визначають за формулою
b = -fa¢/f'а = na'/n'a. (12)
Наведені вище формули (3)-(12) при відомих вихідних даних дозволяють знайти положення (відрізки z', а') і розмір зображення (y').
Уведемо поняття ще про два збільшення оптичної системи.
Кутовим збільшенням оптичної системи називають відношення тангенсів кутів, утворених сполученими променями з оптичною віссю:
y = tg s'/tg s. (13)
З рис. 6 випливає, що
g = а/а'. (14)
Використовуючи формули (12) і (14), одержимо, що
g = ![]() . (15)
. (15)
Формула (15) установлює зв'язок між кутовим і лінійним збільшеннями.
Точки предмета і зображення, що лежать на оптичній осі, для яких g = +1. називаються вузловими точками оптичної системи. З формули (15) видно, що вузлові точки збігаються з головними (b = +1) у тому випадку, якщо оптична система знаходиться в однорідному середовищі. У цьому випадку сполучені промені, що проходять крізь головні точки Н і Н', рівнобіжні один одному.
Подовжнім збільшенням a оптичною системою називають відношення розміру зображення нескінченно малого відрізка, розташованого уздовж оптичної осі, до розміру цього відрізка:
a = dz'¤dz.
Продиференціюємо формулу Ньютона (3) по z і z'. Після множення і розподілу знайденого вираження на ff' і заміни відносин z'/f' і f/z через b одержимо, що
а = -(f'/f) b2. (16)
На підставі виразів (15) і (16) можна записати:
gb = -f/f; (17)
ga = b. (18)
Рівняння (18) установлює зв'язок між трьома збільшеннями b, g і a . При f' = -f
gb = 1; (19)
a = b2.(20)
3. Побудова і розрахунок ходу променів крізь ідеальну оптичну систему
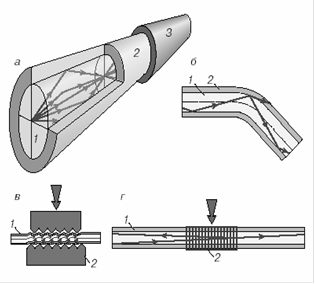
У практичній роботі конструкторів оптичних приладів досить широко використовуються властивості кардинальних елементів і основні математичні залежності ідеальної оптичної системи. Графічне розв’язання задач дозволяє найбільш наочно знайти оптимальний варіант. Чотири способи побудови ходу променів крізь позитивну і негативну оптичні системи зображено на рис. 8. Побудови виконані з припущень, що оптична система розташована в однорідному середовищі, тобто n = n', f = -f, а отже, вузлові N, N' і головні Н, Н' точки збігаються. Дамо деякі пояснення до рис. 8. Точки, загальні для заданого і допоміжного променів у передній фокальній площині, умовно позначені буквою C, а точки, загальні для тих же променів у задній фокальній площині, позначені відповідно через С'. Промені, що виходять із точок C, після проходження системи будуть рівнобіжними між собою. Якщо головні площини зливаються (система тонка), то побудови будуть простіші.

Рисунок 7- Чотири способи побудування ходу променів крізь розташовану в однорідному середовищі оптичної системи
Часто оптичні системи складаються з великого числа окремих компонентів, що вилучений один від одного на значні відстані. У цьому випадку багато задач геометричної оптики зручніше розв’язувати шляхом розрахунку ходу променів. Наприклад, у центрованих оптичних системах положення зображення предмета, перпендикулярного до оптичної осі, можна визначити шляхом розрахунку променя, що проходить крізь вісьову точку А цей предмет. Положення променя, що виходить із точки А і падаючого на висоті h на оптичну систему (див. рис. 6), визначається кутом а з оптичною віссю. Знайдемо кут а'. Згідно з рис. 6 маємо
а = h/tg s іа' = h/tg s'.
Поставивши а й а' у формулу відрізків (4), після перетворення одержимо
tg s' = (-f/f¢) tg s + hФ/n',
де Ф = n'/f' називають оптичною силою системи.
Останню формулу називають формулою кутів. У загальному вигляді для системи з декількох компонентів вона має такий вигляд:
tg sk+1 = (-fk/f'k) tg sk + hkФ/nk+1. (21)
У формулі (21) відношення -fk¢/f¢ можна замінити відношенням показників переломлення, тоді
tg sk+1 = ![]() tg s + hkФk/nk+1 (22)
tg s + hkФk/nk+1 (22)
Якщо оптична система знаходиться в повітрі, то з (22) випливає, що
tg sk+1 = tg sk + hk Фk. (23)
Висоти h падіння променів на компоненти залежать від кутів, а також від відстаней між цими компонентами:
hk+1 = hk – dk tg sk+1. (24)
Рівняння (24) називають формулою висот. Послідовно застосовуючи формули кутів і висот, можна розрахувати хід променів крізь ідеальну оптичну систему будь-якої складності.
Похожие работы

... інші величини, що характеризують властивості оптичної системи. Потім шляхом інтерполяції чи екстраполяції знаходять варіант оптичної системи, що задовольняє технічному завданню. Комбінований метод На початку розрахунку за цим методом припускають, що в оптичній системі присутні лише аберації третього порядку, і розрахунок виконують на підставі теорії аберацій третього порядку. Після знаходження ...
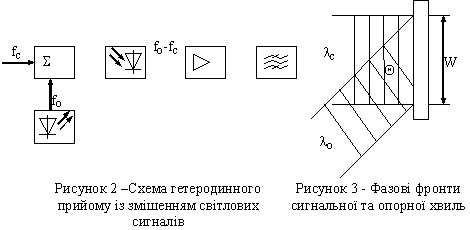
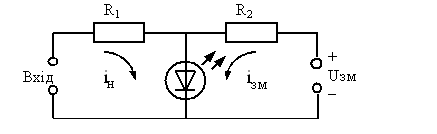
... льшу потужність, що приймається, ніж необхідно для ідеального квантового детектора. 3. Розрахунок шумів попередніх каскадів підсилювачів Активними елементами вхідних каскадів оптичних приймальних пристроїв є як польові, так і біполярні транзистори. Частіше використовуються польові транзистори, вони мають великий вхідний опір, тому узгоджуються з великим опором фотодетектора без застосування ...
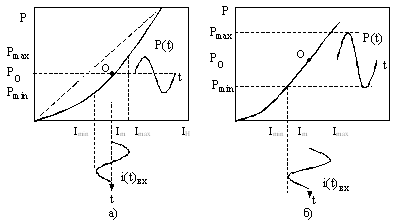
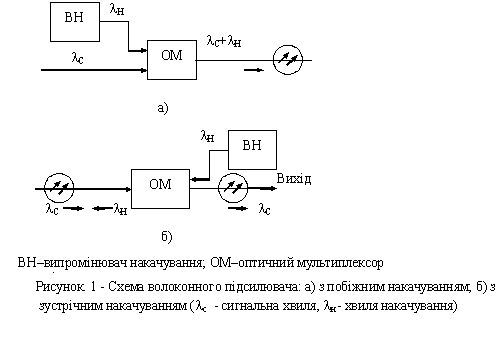
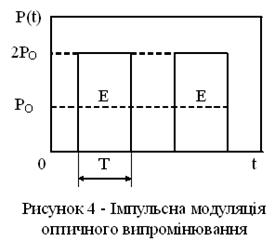
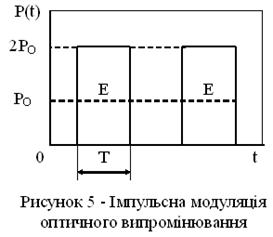
... і ВтАХ. Цей метод дозволяє усувати лише парні гармоніки. Таким чином, наведені методи компенсації нелінійних викривлень розширюють можливості аналогових ВОСП. 2. Цифрові оптичні передавальні пристрої У волоконно-оптичних системах передачі оптичне випромінювання модулюється дворівневими сигналами ("0" та "1") кодів, які застосовуються у світловодних трактах. У цифрових оптичних передавальних ...

... РВФ. Будь-яка перешкода, що порушує масоперенос, дає помилку в показаннях ВОС. На рис.3.3 показана схема роботи необоротного оптрода на кисень. Рис.3.3. Схема роботи необоротного волоконно-оптичного сенсора на кисень. Обумовлений компонент дифундує через селективну мембрану з відповідним розміром пор у порожнину, що містить іммобілізований флуоресціюючий барвник. Його світіння гаситься в ...
0 комментариев