Навигация
Электромагнитные преобразователи
39552
знака
2
таблицы
9
изображений
1.2.2 Электромагнитные преобразователи
Индуктивные преобразователи.
Преобразователи, преобразующие естественную входную величину в виде перемещения в изменение индуктивности, называются индуктивными.
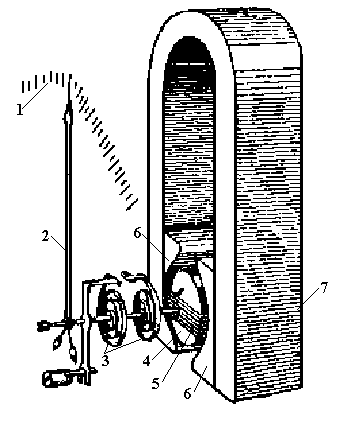
Индуктивный преобразователь представляет собой дроссель с изменяющимся воздушным зазором (рис..6. а.) или изменяющейся площадью поперечного сечения (рис.6. б)
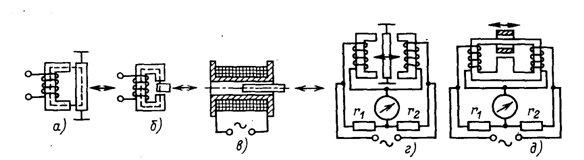
Рис. 6. Конструкция и схемы включения индуктивных пореобразователей.
Выходной параметр индуктивного преобразователя – изменение индуктивности L обмотки, надетой на сердечник, при изменении зазора δ или площади S.
Для измерения больших перемещений применяют индуктивные преобразователи соленоидного типа ( рис.6. в.). Изменение индуктивности в этих преобразователях вызывается перемещением в катушке ферромагнитного сердечника. Соленоидные преобразователи могут применяться для измерения перемещений 100 – 1000 мм.Особенность индуктивных преобразователей в том, что чувствительность их к внешним факторам не зависит от чувствительности к измеряемой величине, поэтому увеличение чувствительности к измеряемой величине приводит к уменьшению погрешности преобразователя.Индуктивные преобразователи применяют для измерения перемещений, толщены покрытий, в микромерах. Изготавливают также индуктивные динаметры и манометры, в которых усилие и давление преобразуется в перемещение при помощи упругих элементов, т.е. промежуточных преобразователей.При эксплуатации индуктивных преобразователей следует учитывать электромеханическую силу, действующую на подвижный сердечник. Поэтому их можно использовать только для измерения достаточно больших сил.Динамические характеристики индуктивных преобразователей определяются в основном параметрами подвижной механической системы, которая чаще всего является колебательной.
Трансформаторные преобразователи.
Преобразователи, преобразующие перемещение в изменение взаимоиндуктивности, называются трансформаторными.
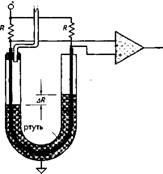
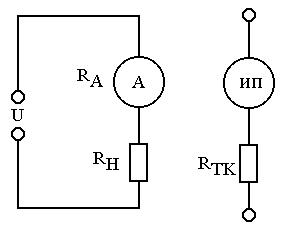
На рис.7. а и б показаны трасформаторные преобразователи с подвижным сердечником.
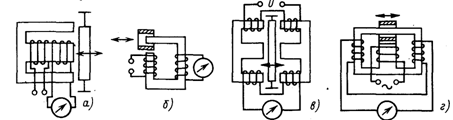
Рис.7. Конструкции и схемы включения трансформаторных преобразователей
Достоинства трансформаторных преобразователей : достаточная мощность сигнала без усилительных устройств, сравнительная простота для измерения усилий и давлений. Трансформаторные преобразователи применяют в сочетании с упругими элементами (мембранами, пружинами).Недостатки индуктивных и трансформаторных преобразователей - в большой инерционности, необходимости регулировки и компенсации начального напряжения на выходе преобразователя. Кроме того, для уменьшения помех оба преобразователя нуждаются в тщательной экранировке, что увеличивает размеры и массу преобразователя. Погрешности трансформаторных преобразователей вызываются в основном нестабильностью напряжения и частоты источника питания, а также влиянием изменения температуры.При измерении динамических процессов частота источника питания должна быть значительно выше частоты измеряемого процесса. При измерении медленно меняющихся процессов преобразователь подключают к источнику питания промышленной частоты.
Магнитоупругие преобразователи.
Преобразователи, основанные на изменении магнитной проницаемости ферромагнитного сердечника под воздействием механической деформации, называют магнитоупругими.Магнитоупругий преобразователь представляет собой ферромагнитный сердечник с одной или двумя обмотками, к которому прикладываются механические усилия. Усилие создает в сердечнике механическое напряжение, которое приводит к изменению магнитной проницаемости μ и, следовательно, к изменению магнитного сопротивления, что обуславливает изменение электрического сопротивления Z катушки. Таким образом, в магнитоупругом преобразователе имеется следующая цепь преобразований:F → σ → μ → R → Z или e. Магнитоупругий эффект объясняется дополнительным магнитным взаимодействием атомом вследствие искажения атомной решетки кристалла от воздействия механических усилий. В общем случае зависимость магнитной проницаемости от механических напряжений имеет довольно нелинейный характер. Однако, выбирая оптимальные режимы работы, можно получить относительно линейную зависимость.
Существует большое разнообразие конструктивных форм магнитоупругих преобразователей. Их можно разбить на две основные группы: преобразователи дроссельного и трансформаторного типов.В преобразователях дроссельного типа изменение магнитной проницаемости сердечника приводит к изменению полного электрического сопротивления катушки дросселя.В преобразователях трансформаторного типа в качестве выходной величины используется взаимная индуктивность. Такие пореобразователи – по существу трансформаторные с переменным коэффициентом трансформации. Конструкции основных типов магнитоупругих преобразователей показаны на рис. 8.
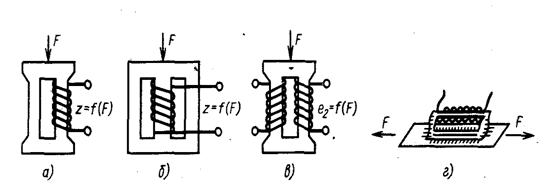
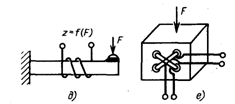
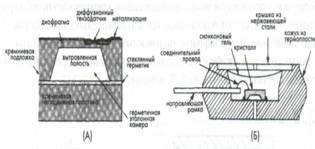
Рис.8. Конструкции магнитоупругих преобразователей.
Сердечник преобразователя при измерении сосредоточенных сил может претерпевать деформацию сжатия (растяжения) (рис. 8. а, б, и в ) или изгиба (рис.8.д.). На рис.8.г. изображен тензометрический магнитоупругий преобразователь, магнитная цепь которого выполнена из тонкого листа пермаллоя, наклеенного на исследуемую деталь.
В преобразователях, приведенных на рис.8. а-д, используется эффект изменение магнитной проницаемости сердечника в одном направлении. В настоящее время широкое применение получили магнитоупругие преобразователи, в которых используется изменение магнитной проницаемости одновременно в двух взаимно перпендикулярных направлениях, т.е. магнитная анизотропия сердечника. На рис.8. е показана конструкция магнитноанизотропного преобразователя со скрещенными обмотками. Первичная и вторичная обмотки расположены в сплошном магнитопроводе под прямым углом друг к другу. В ненагруженном состоянии преобразователя силовые линии первичной обмотки не пересекают вторичную обмотку, в результате чего ЭДС вторичной обмотки равно нулю. При действии усилия вследствие изменения магнитной проницаемости материала магнитное поле вытягивается в направлении большей проницаемости, сжимается в направлении меньшей проницаемости и, сцепляясь со вторичной обмоткой, индуцирует в ней ЭДС, пропорциональную приложенному усилию.
Магнитострикционный эффект – четный эффект, т.е. знак деформации сердечника не меняется при перемене направления поля на обратное. Частота изменения деформаций или колебаний сердечника в 2 раза больше частоты переменного тока, протекающего через обмотку преобразователя. На магнитострикционном эффекте основана работа магнитострикционных ультразвуковых преобразователей или излучателей.
Основные достоинства магнитоупругих преобразователей: высокие мощность и уровень выходного сигнала, надежность, простота конструкции. Однко магнитоупругие преобразователи обладают довольно большими погрешностями. Основные источники погрешностей: температурная погрешность и магнитоупругий гистерезис. При быстроизменяющихся усилий следует учитывать также инерционность магнитоупругих преобразователей.
Индукционные преобразователи.
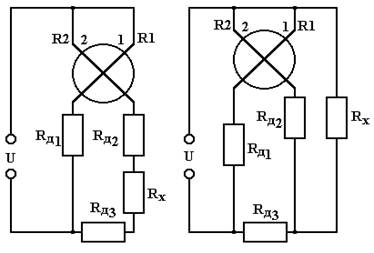
Преобразователи, в которых используется яление электромагнитной индукции, т.е. наведение ЭДС в электрическом контуре при изменении магнитного потока, называются индукционными.По принципу действия индукционные преобразователи подразделяются на две группы.В преобразователях первой группы магнитное сопротивление постоянного магнитного потока остается неизменным, а индуцированная ЭДС наводится из-за линейных или угловых перемещений сердечника катушки в зазоре ( рис. 9.).
Н1
![]()
![]()
![]()
![]() UIII
UIII
![]()
![]()
![]() К1
К1
![]()
![]()
![]() UII = UIII - UIIII
UII = UIII - UIIII
![]() U1
U1
![]()
![]()
![]()
![]() Н2
Н2
![]()
![]() UIIII
UIIII
![]()
![]()
![]() К2
К2
От ЧЭ Рис. 9. Индукционный преобразователь.
В некоторых конструкциях перемещается катушка. Конструктивно преобразователь представляет собой катушку, имеющую три обмотки.
Первичная обмотка равномерно распределена по всей длине. Две вторичные обмотки выполнены в виде отдельных секций с одинаковым числом витков. Внутри каркаса размещен сердечник, связанный со штоком чувствительного элемента.![]() , где:
, где:![]() - ЭДС верхней вторичной обмотки;
- ЭДС верхней вторичной обмотки;![]() - ЭДС нижней вторичной обмотки;К – коэффициент продолжительности;
- ЭДС нижней вторичной обмотки;К – коэффициент продолжительности;![]() - частота переменного напряжения, подаваемого на первичную обмотку;
- частота переменного напряжения, подаваемого на первичную обмотку;![]() - напряжение первичной обмотки;М – взаимоиндуктивность первичной и вторичных обмоток.Так как вторичные обмотки включены встречно, то суммарное напряжение на выходе преобразователя в среднем положении сердечникаравно нулю:
- напряжение первичной обмотки;М – взаимоиндуктивность первичной и вторичных обмоток.Так как вторичные обмотки включены встречно, то суммарное напряжение на выходе преобразователя в среднем положении сердечникаравно нулю:![]() .При изменении давления сердечник перемещается, например, вверх. Вследствие этого взаимоиндуктивность катушек изменяется на
.При изменении давления сердечник перемещается, например, вверх. Вследствие этого взаимоиндуктивность катушек изменяется на ![]() . ЭДС во вторичных обмотках будут иметь:
. ЭДС во вторичных обмотках будут иметь:![]()
![]() На выходе преобразователя будет действовать напряжение
На выходе преобразователя будет действовать напряжение![]()
При перемещении сердечника вниз на выходе преобразователя действует напряжение ![]() Изменение взаимоиндуктивности
Изменение взаимоиндуктивности ![]() пропорционально изменению положения сердечника
пропорционально изменению положения сердечника ![]() :
:![]() .
.
Таким образом, величина действующего напряжения Uii определяется перемещением сердечника и пропорциональна этому перемещению.
В преобразователях второй группы магнит и катушка неподвижны. А индуцированная ЭДС наводится путем изменения магнитного потока вследствие колебания магнитного сопротивления магнитной цепи, создаваемых чаще всего изменением воздушного зазора этой цепи
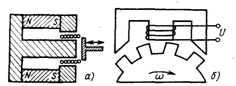
Рис. 10. Конструкции индукционных преобразователей.
При вращении ротора происходит изменение сопротивления магнитной цепи с частотой, определяемой скорость вращения и числом зубцов. Индукционные преобразователи, предназначенные для измерения скорости вращения, называют тахогенераторами. Тахогенераторы – это электрические машины, работающие в генераторном режиме и служащие для преобразования скорости вращения в пропорциональный электрический сигнал.
Похожие работы


... , регулирующие органы и исполнительные механизмы. Измерительное устройство, в общем случае, состоит из первичного, промежуточного и передающего измерительных преобразователей. Первичным измерительным преобразователем (или сокращенно первичным преобразователем) называется элемент измерительного устройства, к которому подведена измеряемая величина. Первичный преобразователь занимает первое место в ...

... , и для задания нужного характера шкалы прибора. а б Рисунок 5 – Схемы включения логометрических преобразователей при измерении больших сопротивлений 2. Электростатические измерительные приборы Электростатические приборы обладают целым рядом отличительных особенностей, обусловливающих их значительные преимущества по сравнению с приборами других систем. Это, прежде всего, малое ...
... фактически измеряется не магнитная, а электрическая величина, в которую магнитная величина преобразуется в процессе измерения. Интересующая нас магнитная величина определяется расчетным путем на основании известных зависимостей между магнитными и электрическими величинами. Теоретической основой подобных методов является второе уравнение Максвелла, связывающее магнитное поле с полем электрическим; ...
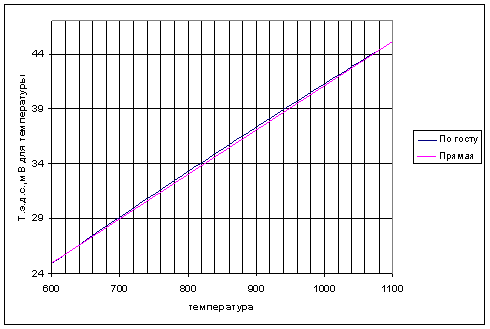
... . Все термодатчики имеют нелинейную зависимость выходного сигнала от температуры (кроме тех, что были созданы с помощью интегральных микросхем). В данной курсовой работе представлен процесс создания измерительного преобразователя для датчика термопары. Рассмотрим термопару ТХА(K). 1. Построение графика функции E = F(t) Для построения НСХ - номинальной статистической характеристики ( ...
0 комментариев