Навигация
Содержание фаила «dano.txt»
45197
знаков
6
таблиц
28
изображений
1.6 Содержание фаила «dano.txt»
Задание А:
Точка 1.
Координата по оси X:
5119.94
Координата по оси Y:
6157.33
Точка 2.
Координата по оси X:
7182.27
Координата по оси Y:
4976.39
Задание B:
Точка 1.
Координата по оси X:
10932.84
Координата по оси Y:
6112.26
Точка 2.
Координата по оси X:
9115.24
Координата по оси Y:
4903.68
1.7 Результаты программы
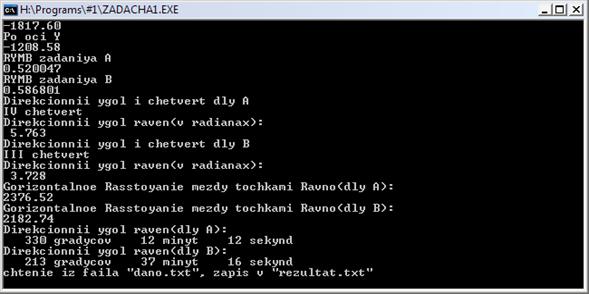
Рис.1.3 Результаты в Turbo Pascal.
Содержание фаила «rezultat.txt»:
Приращения для задания А
По оси X
2062.33
По оси Y
-1180.94
Приращения для задания B
По оси X
-1817.60
По оси Y
-1208.58
Румб для задания А
0.520047
Румб для задания А
0.586801
Дирекционный угол и четверть для задания А:
IV четверть
Дирекционный угол равен(в радианах):
5.763
Дирекционный угол и четверть для задания B:
III четверть
Дирекционный угол равен(в радианах):
3.728
Горизонтальное расстояние между точками равно(для задания А):
2376.52
Горизонтальное расстояние между точками равно(для задания B):
2182.74
Дирекционный угол равен(для задания А):
330 градусов 12 минут 12 секунд
Дирекционный угол равен(для задания B):
213 градусов 37 минут 16 секунд
1.8 Табличные вычисления MS Excel

Рис.1.4 Проверка в MS Excel.
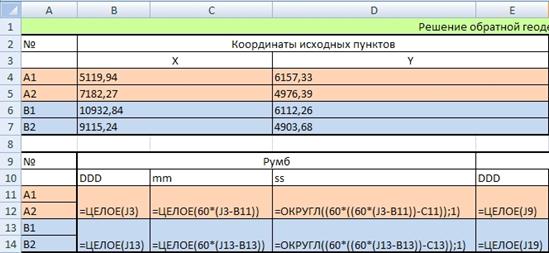
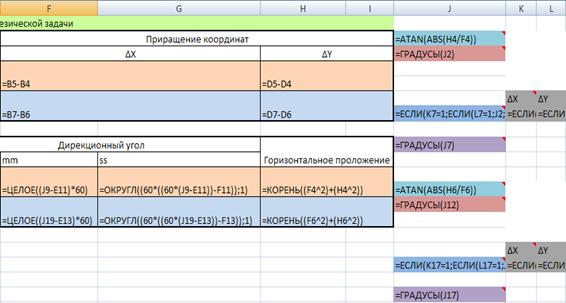
Рис. 1.5 Проверка в MS Excel в режиме отображения формул.
1.9 Вычисления в MathCad
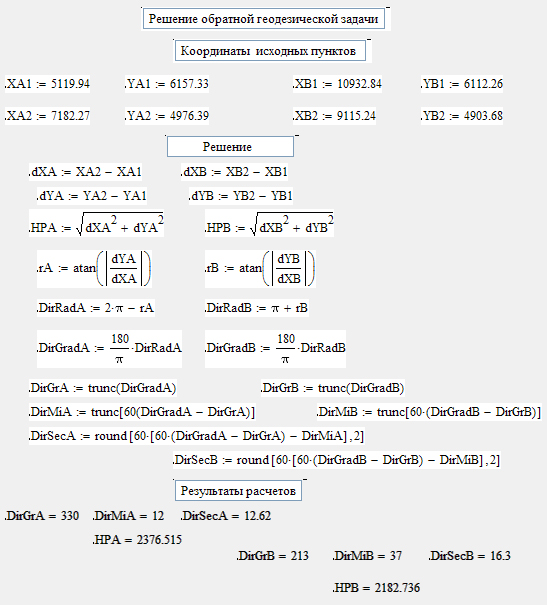
Рис. 1.6 Проверка в MathCad 14.
1.10 Анализ
Таким образом, обратная геодезическая задача была решена с помощью языка программирования Turbo Pascal и затем была проверена с помощью табличного процессора Microsoft Excel 2007 и MathCad 14.Результаты решений совпали, что говорит о правильности выбранного алгоритма решения задачи.
2. Прямая угловая засечка
2.1 Теоретические сведения
Прямая угловая (геодезическая) засечка - такое название носит способ определения координат точки местности Р , если на плоскости дана система точек геодезической сети с известными координатами ![]() и на этих точках измерены горизонтальные углы
и на этих точках измерены горизонтальные углы ![]() (рис.2.1.).
(рис.2.1.).

![]()
![]() Р P
Р P
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Рис. 2.1. Схемы прямой геодезической засечки.
Большое значение имеет величина угла при вершине треугольника – угла засечки , от которого во многом зависит точность определения координат. В инструкциях по проведению геодезической съемки указывается, что угол засечки не должен быть меньше 30о и больше 150о.
Для определения координат точки Р можно использовать формулы Юнга или формулы Гаусса. Чаще используются формулы Юнга, которые еще называют формулами котангенсов внутренних углов треугольника.
![]() (2.1)
(2.1)
![]() (2.2)
(2.2)
Широко используются и формулы Гаусса. В этом случае исходными данными являются не только координаты пунктов А1 и А2 и измеренные горизонтальные углы , но и вычисленный дирекционный угол стороны А1 А2.
![]() (2.3)
(2.3)
![]() (2.4)
(2.4)
Если пунктов геодезической сети более двух (рис.2.1б), то исходные данные являются избыточными, т.к. для определения искомых координат точки Р достаточно знать координаты и углы двух точек одного треугольника. Но в инструкции по выполнению геодезических работ требуют, чтобы координаты точки Р определялись как минимум из двух треугольников.
Избыточность исходных данных позволяет повысить надежность определения окончательных значений искомых величин за счет применения правила арифметического среднего.
 (2.5)
(2.5)
![]() , (2.6)
, (2.6)
где XPk ,YPk координаты, определенные из k-того треугольника.
Похожие работы

... многих странах (в том числе развитых) применение компьютеров в управлении городскими территориями, ведении кадастра, анализе рыночных тенденций в рамках города весьма ограничено. В связи с этим выделим причины, по которым автоматизация решения типовых задач управления региональной недвижимостью Тульской области, как, впрочем, и других городов России, представляется весьма разумной: все материалы ...
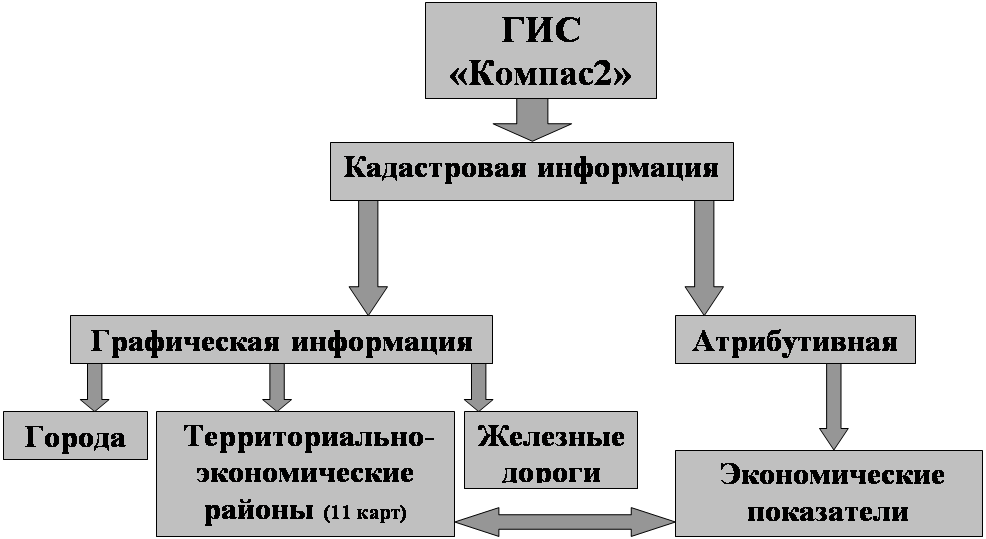
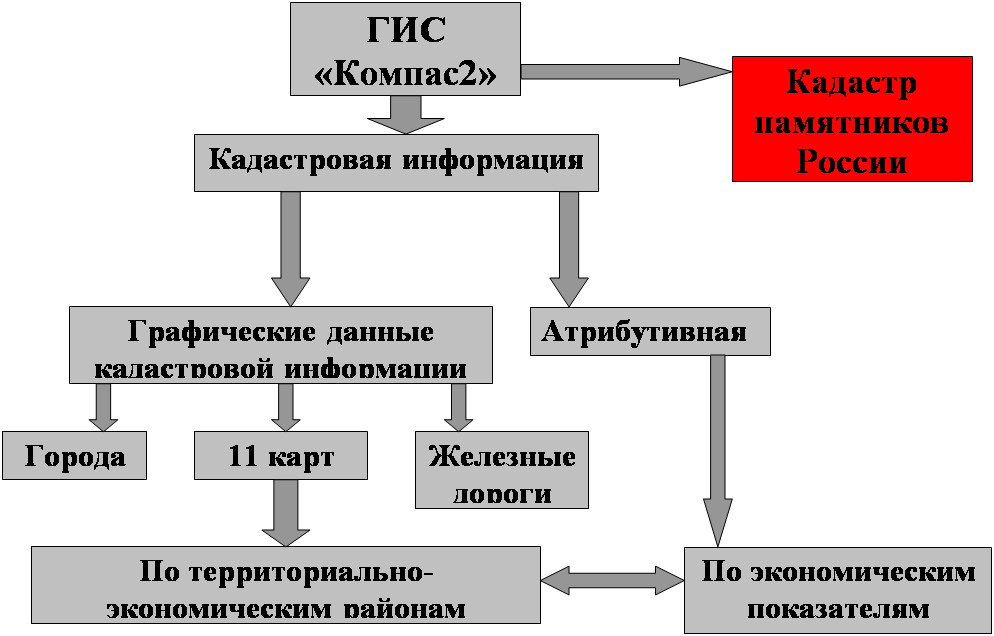
... кадастра памятников России и привязки его к ГИС «Компас-2», я изучил возможности, функции ГИС «Компас-2», а также возможность использования его для создания различных видов природных кадастров. Компас-2 – это сетевая система для представления, моделирования и анализа географической информации Функциональные возможности системы КОМПАС 2: публикация географической информации (ГИ) в сетях ...
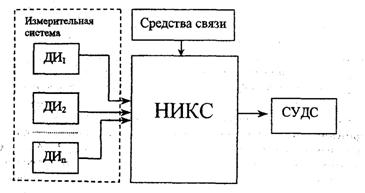

... информации. Набираемая информация отображается на дисплее, что позволяет контролировать ее правильность. Клавиатура и дисплей АИС должны быть независимыми от других навигационных устройств. Судовыми системами отображения АИС могут быть система отображения электронных карт (ECDIS, ECS, RCDS), РЛС, САРП или дисплей персонального компьютера. АИС и связанные с ней датчики информации питаются от ...
... де-факто, чему способствовала и их большая универсальность). Таким образом, именно Microsoft Excel был выбран мной для разработки средства автоматизации расчетов в лабораторной работе «Предварительные вычисления в триангуляции». Поэтому другие средства построения электронных таблиц здесь не рассматриваются, но зато уделяестся внимание некоторым специфичным средствам Excel. Возможности EXCEL ...
0 комментариев